
Fターム[5B057DC13]の内容
Fターム[5B057DC13]に分類される特許
1 - 20 / 188
シルエット抽出方法及びシルエット抽出システム
画像処理装置
人検出装置、人検出方法及び人検出プログラム
車両運転支援システム
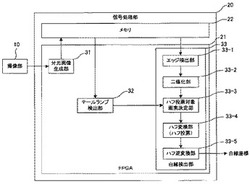
【課題】無駄のない効率的なハフ投票を行い、走行車線検出の処理速度を上げることができる。
【解決手段】撮像部10によって撮像された画像から、テールランプ検出部32によって自車両の直前前方を走行している前方車両のテールランプを分光フィルタを介して検出する。そして、検出したテールランプの画像に基づいて前方車両の位置を検出する。白線検出部33によって、前方車両の位置に基づいて路面の走行車線の候補エッジを抽出し、抽出した候補エッジにハフ変換処理を施して走行車線を決定する。
(もっと読む)
車線判別装置

【課題】登坂車線を簡易に且つ確実に判別することができる車線判別装置を提供する。
【解決手段】車両2に搭載される車線判別装置であって、車両2の走行中に走行する道路上の車線境界線を含む車両2の前方の画像を所定期間連続して取得する画像取得手部30と、連続する画像の各画像内に同一の車線境界線が存在するか否かを判定する境界線判定部43と、同一の車線境界線が存在すると境界線判定部43が判定した場合、画像の車線境界線上において画像濃度が所定値以上変化する点を車線境界線のエッジ点として画像毎に抽出するエッジ点抽出部44と、抽出された車線境界線のエッジ点の数を画像毎に集計する集計部45と、連続する画像において、集計したエッジ点の数の所定期間における周期的な変化に基づいて、車線境界線が登坂車線と走行車線との車線境界線であるか否かを判別する境界線判別部46と、を備える。
(もっと読む)
画像処理装置
【課題】焦点距離に関する情報がなくても、幾何学的歪みの補正を適切に行う画像処理装置を提供する。
【解決手段】画像処理装置1は、撮像文書画像における水平方向の消失点の位置および垂直方向の消失点の位置を示す消失点情報を生成する消失点情報推定部14と、撮像文書画像におけるコーナーを検出するコーナー検出部15と、水平方向の消失点の位置に集まる2つの線分を上辺および下辺とし、垂直方向の消失点の位置に集まる2つの線分を左辺および右辺とし、検出されたコーナーを囲む四角形の輪郭を輪郭四角形として決定する輪郭決定部16と、輪郭四角形に基づいて、幾何学的補正後の第1画像サイズを決定する画像サイズ決定部19と、上記輪郭四角形と上記第1画像サイズとに基づいた第1補正方法により撮像文書画像に対して幾何学的補正を行う補正処理部20とを備えている。
(もっと読む)
画像測定装置及び画像測定方法
【課題】操作者の手間が少なく、画像中の図形情報の測定を迅速且つ確実に行う。
【解決手段】CPU41は、撮像ユニット17で撮像された被測定対象物の画像を取り込み、取り込んだ画像に含まれる図形の輪郭線をハフ変換によって検出し、検出した輪郭線上にエッジ検出ツールを設定し、設定されたエッジ検出ツールにより、前記図形に関する図形情報の測定を行う。
(もっと読む)
画像処理装置およびこれを備えた原稿読取システム
【課題】画像処理装置において、ユーザが原稿を手で押さえて読み取り時の紙面を正常に保持しながら、特定の操作を必要とすることなく、所望のタイミングで撮影画像を記録可能とする。
【解決手段】撮影画像から原稿の輪郭成分を抽出するページ輪郭検出部32と、撮影画像において特定領域A1、A2を設定する特定領域設定部33と、特定領域においてユーザの手指を認識する指認識部31と、指認識部にて認識された手指の動きを検出する動き検出部35と、動き検出部の検出結果に基づき、ユーザからの動作指令が与えられたと判定した場合に、撮影画像を記録する画像記録部36とを備え構成とする。
(もっと読む)
車載白線認識装置
【課題】 制御対象とすべき白線を適切に選択できる車載白線認識装置を提供する。
【解決手段】 複合線判定部70は、白線特徴統合部60にて出力された尤度が所定の閾値以上である白線候補それぞれに対して複数のテンプレートによるパターンマッチングを行い、また、白線候補抽出部30によるハフ変換の投票数に応じて破線のピッチを判定して、それらの結果に基づいて、様々な線種類に対して、ある白線がその線種類である確からしさを示すパラメータをまとめた確信度分布を出力し、当該白線の線種類を判別する。制御対象白線選択部80は、複合線を構成する短い破線を除いて車両に最も近い白線を制御対象の白線として選択する。
(もっと読む)
画像処理装置、画像認識装置及び方法
【課題】適用範囲が広く、ステレオ画像認識処理に必要なステレオキャリブレーションの自動化に有効な画像処理装置を提供する。
【解決手段】本実施形態によれば、画像処理装置は、画像取得部と、特徴量抽出部と、対応検出部と、算出部とを備えた構成である。画像取得部は、複数のカメラから共通撮影領域に対応する画像データを取得する。特徴量抽出部は、前記カメラ毎の画像データから前記共通撮影領域の特徴量情報として、前記共通撮影領域に存在する同一の実像に基づいた少なくとも2つの平面上パターンを算出する。対応検出部は、前記2つの平面上パターンにおいて前記カメラ毎の画像データ間の対応関係を検出する。算出部は、前記対応検出部により算出された対応関係情報に基づいて、前記カメラ毎の画像間の画像変換パラメータ情報を算出する。
(もっと読む)
環境認識装置および環境認識方法
【課題】処理負荷を軽減すると共にメモリの記憶領域を低減することで、対象物の特定効率の向上を図る。
【解決手段】環境認識装置130は、特定物の形状に関する情報である形状情報を予め保持しておき、検出領域内を分割した複数の対象部位の輝度を取得して、エッジを有する対象部位を抽出し、エッジを有する対象部位の相対距離を取得し、相対距離に応じた形状情報に基づいてエッジを有する対象部位にハフ変換を施し、形状情報で示される特定物を決定する。
(もっと読む)
環境認識装置および環境認識方法
【課題】対象物の規則性に基づいて対象物の特定精度を向上し、誤認識を回避する。
【解決手段】
環境認識装置130は、対象部位の輝度から、対象部位に対応する特定物を仮決定し(S302)、水平距離の差分および高さの差分が第1所定範囲内にある、同一の特定物に対応すると仮決定された対象部位をグループ化して対象物とし(S304)、任意の対象物から、水平距離の差分、高さの差分、および、相対距離の差分が第2所定範囲内にある、同一の特定物に対応すると仮決定された対象物を順次検出し、対象物群を特定し(S306)、対象物群における対象物の数に応じて対象物群が特定物であるか否かを決定する(S308)。
(もっと読む)
路面状態検出装置、路面状態検出方法、及び路面状態検出プログラム
【課題】正しく路面の勾配を検出することができる路面状態検出装置、路面状態検出方法、及び路面状態検出プログラムを提供する。
【解決手段】画像取得部は画像を取得し、区分線認識部は前記取得した画像から路面に表された1つの車線の左側を区分する区分線と当該車線の右側を区分する区分線を抽出し、路面状態判定部は前記左側を区分する区分線の方向と前記右側を区分する区分線の方向に基づき、前記路面の勾配の変化を表す勾配情報を判定する。
(もっと読む)
信号処理装置、信号処理方法、および信号処理プログラム
【課題】処理対象の画像と参照画像との画像品質が異なっていても、本来あるべき画像の特徴に近い画像を生成する。
【解決手段】第1成分抽出部105は、処理対象となる信号から抽出成分情報とそれ以外の信号である抽出外成分情報とに分離する。第2成分抽出部106は、参照対象となる信号から抽出成分情報を生成する。類似成分特定部109は、参照側の抽出成分情報の領域を特定する位置情報を生成する。位置合わせ合成部110は、処理対象となる信号においてより高い精度で参照側の信号の貼り付け位置を特定し、参照側の抽出成分情報の領域に含まれる信号成分の貼り付けおよび信号の合成を行うことで合成成分情報を生成する。帯域抑制部111は、合成成分情報に対して帯域制限された合成成分情報を生成する。統合制御部116は、帯域制限された合成成分情報を新たな処理対象となる信号とし、信号の再構成処理を繰り返すように制御する。
(もっと読む)
走行状況判定装置及び走行状況判定方法
【課題】本線車道への合流において、自車両の走行状況を的確に判断することができる走行状況判定方法及び走行状況判定装置を提供する。
【解決手段】取付道路から本線道路への合流において自車両の走行状況を判定する支援制御ユニット2は、合流開始を検出するための合流開始場面、又は合流終了を検出するための合流終了場面であるか否かを、自車位置と経路データ6a、地図描画データ6b又は路面に示された標示の位置を少なくとも有するレーン情報7aとに基づき判断するとともに、自車両のその時点の状況が合流開始場面又は合流終了場面であると判断した場合に、自車両の合流開始のタイミング又は合流終了のタイミングをそれぞれ判定する。
(もっと読む)
画像処理装置、および画像処理方法
【課題】正確に瞳の領域を検出することができる画像処理装置を実現する。
【解決手段】本発明に係る画像処理装置6は、人物の顔画像から目の特徴を特定する画像処理装置であって、顔画像の目がある目領域を、少なくとも目における縦方向に微分して輝度勾配を求める第2微分部41と、目領域について、輝度勾配を2値化しエッジ点を抽出する2値化部42と、目頭点および目尻点を両端点とし、該両端点と制御点とによって表現される曲線であって、かつ、上記エッジ点に適合する曲線を、上瞼または下瞼の輪郭を表す曲線として特定する瞼輪郭特定部44とを備える。
(もっと読む)
画像処理装置およびこれを備えた原稿読取システム
【課題】原稿の紙面上で指などの指示物で領域を直接指定する動作で切出し画像を取得することができるようにする。
【解決手段】指などの指示物のない状態で原稿の紙面を載置面とともに撮影した第1の撮影画像と、原稿の紙面上で切り出すべき領域を指し示す指示物を原稿の紙面とともに撮影した第2の撮影画像とを取得し、切出し領域取得部33にて、第2の撮影画像から指示物が指し示す点を検出して切出し領域を求め、切出し領域取得部33は指示物が指し示す1点の軌跡で表される指定領域に基づいて切出し領域を求める。
(もっと読む)
駐車枠検出装置及び駐車枠検出方法
【課題】駐車枠検出装置及び駐車枠検出方法において、俯瞰変換後の画像分解能に影響されずに、元の画像分解能でエッジを扱うことにある。
【解決手段】制御手段(11)は、撮像手段(9)により撮像された後方画像からエッジを抽出するエッジ抽出部(13)と、エッジ抽出部(13)によりエッジを抽出された画像を俯瞰画像に変換してこの変換時に俯瞰画像上の各エッジ点に対応するエッジ抽出画像上のエッジ点の個数を記録する俯瞰画像変換部(14)と、俯瞰画像変換部(14)により変換された俯瞰画像からρ−θ空間への投票値としてエッジ点の個数を用いてハフ変換により直線を検出する直線検出部(15)と、直線検出部(15)により検出された直線が駐車枠の線であるか否かを判定する駐車枠判定部(16)とを備える。
(もっと読む)
基準パターン情報生成装置、方法、プログラムおよび一般車両位置特定装置
【課題】車両の揺動によって車載カメラの視野方向が変化した場合であっても車両の位置を特定可能な技術の提供。
【解決手段】基準車両の周囲の地物を撮影した撮影画像から前記地物の像に含まれる複数の基準画像特徴点を抽出して前記撮影画像上での位置を示す座標値を取得し、前記地物を撮影した時点での前記基準車両の位置を基準位置として取得し、前記基準画像特徴点の前記座標値と前記基準位置とを対応づけて基準パターン情報として所定の記録媒体に記録し、前記基準パターン情報を所定の記録媒体に記録する際には、前記基準車両の揺動に応じた特定の座標成分の前記座標値の変化が複数の前記基準画像特徴点において所定量以下となる場合、前記特定の座標成分の前記座標値である基準座標値を前記基準画像特徴点の前記座標値とする。
(もっと読む)
駐車枠検出装置及び駐車枠検出方法
【課題】この発明は、駐車枠の線の左右両端の候補となる直線を精度良く検出でき、無関係な直線を駐車枠の線の両端と誤検出することを防止でき、駐車枠を精度良く検出することを目的としている。
【解決手段】この発明は、車両後方を撮像する撮像手段と、撮像した後方画像からエッジを抽出するエッジ抽出手段と、エッジを抽出された画像を俯瞰画像に変換する画像変換手段と、変換された俯瞰画像を左右の領域に分割する領域分割手段と、分割された左右領域からハフ変換により領域毎にそれぞれ直線を検出する直線検出手段と、検出された直線が幅を有する線の端であるか否かを判定する第1の判定手段と、幅を有する線の端であると判定された複数の直線から左右の領域毎に2本の直線の組合せをつくり、この組合せが幅を有する線の両端であるか否かを判定する第2の判定手段とを備えることを特徴とする。
(もっと読む)
1 - 20 / 188
[ Back to top ]