
Fターム[5B057DC17]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 特徴の抽出 (25,407) | 境界(エッジ)、輪郭抽出 (3,814) | 輪郭追跡 (210)
Fターム[5B057DC17]に分類される特許
1 - 20 / 210
シルエット抽出方法及びシルエット抽出システム
情報処理装置、情報処理方法及びプログラム
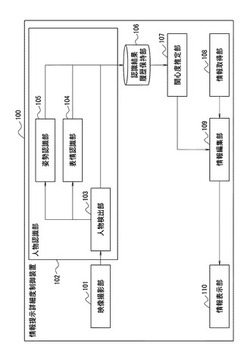
【課題】人物の情報を得ることに対する関心度に応じた量の情報を提示する。
【解決手段】人物認識部102は、撮影された画像データに含まれる人物を認識する。関心度推定部107は、人物認識部102による認識結果に基づいて、情報を得ることに対する人物の関心度を推定する。情報取得部108は、人物に提示する対象となる情報を取得する。情報編集部109は、関心度推定部107により推定された関心度に基づいて、情報取得部108により取得された情報から人物に提示する情報を選択する。情報表示部110は、情報編集部109により選択された情報を出力させる。
(もっと読む)
画像処理装置、及びその制御方法

【課題】画像に含まれる被写体の種類を高精度で判定可能な技術を提供する。
【解決手段】所定の被写体を含んだ画像を表す画像データを取得する取得手段と、前記画像に含まれる輪郭部分を表す輪郭信号を生成する生成手段と、前記画像を分割して得られる複数の分割領域それぞれについて、前記輪郭信号に基づいて代表輪郭方向を検出する検出手段であって、前記分割領域に含まれる輪郭部分全体の方向が所定度合い以上に特定方向に偏っている場合に、当該特定方向を前記代表輪郭方向として検出する前記検出手段と、前記検出された代表輪郭方向の方向別の度数分布、所定方向の代表輪郭方向が検出された前記分割領域が前記画像において当該所定方向に直交する方向に連続して並んでいる度合い、及び前記検出された代表輪郭方向の数のうちの少なくとも1つに基づき、前記被写体の種類を判定する判定手段と、前記被写体の種類に対応する補正方式に従って前記画像データを補正する補正手段と、を備えることを特徴とする画像処理装置を提供する。
(もっと読む)
物体数計測装置、物体数計測方法及び物体数計測プログラム
【課題】屋内・屋外に設置された単眼の監視カメラあるいは定点カメラを使って、撮影範囲内の物体数を物体が少ない場合でも精度よく計測することができる物体数計測装置を提供する。
【解決手段】画像中の物体の数を計測する物体数計測装置であって、画像の各画素の物体の数に対する寄与率を示す荷重値が定義された荷重値テーブルを記憶するテーブル記憶手段と、画像から物体が存在する領域を示す前景領域を抽出する前景抽出手段と、前景領域中の空間的に連続する部分前景領域を生成する部分前景領域生成手段と、生成された部分前景領域のそれぞれに含まれる各画素と荷重値テーブルから得られる当該画素の荷重値から物体の数を算出する部分物体数算出手段と、算出された各部分物体数から画像全体の物体数を算出する全体物体数算出手段とを備える。
(もっと読む)
歯科用画像処理システム
【課題】輪郭の抽出等で困難となる口腔内画像から歯の形状等を正確に検出する。
【解決手段】光点を検出する光点検出手段、光点を4連結または8連結によってひとまとまりの固まりとして、各固まりと、光点の固まりでない部分に識別するためのラベルづけをしておき、そのラベルに基づいて各光点の連結されたかたまりの面積を計算し、その面積を所定の閾値と比較して、閾値より小さいものは雑音光点と判断することにより雑音の光点を判定する手段、雑音の光点と判定された固まりについては、その周囲の固まりのラベルと置き換えることによって雑音光点を除去する手段を備えてなる。
(もっと読む)
画像処理装置及び画像処理方法、並びにプログラム
【課題】実際の水墨画により近い画像を得ること。
【解決手段】原画像取得部41は、原画像100のデータを取得する。水墨画変換部44は、原画像取得部41により取得された原画像100のデータから、水墨画調画像120のデータに変換する。特徴領域検出部42は、原画像取得部41により取得された原画像100のデータから、当該原画像100の特徴領域(本実施形態ではエッジ領域)を検出する。重要度情報算出部43は、原画像取得部41により取得された原画像100のデータから、当該原画像100の重要度の情報を算出する。変換部45は、水墨画変換部44による変換後の水墨画調画像のデータをさらに変換する画像処理として、重要度情報算出部43により算出された重要度の情報に基づいて、特徴領域検出部42により検出された特徴領域をぼかすぼかし処理と、水墨画調画像に対して余白領域140の付加を設定する余白設定処理とを実行する。
(もっと読む)
正しい機器使用姿勢誘導装置及び方法
【課題】 ユーザが正しい姿勢を保持するように補助する装置及び方法を提供する。
【解決手段】 正しい機器使用姿勢誘導装置は、携帯端末で撮影されたユーザの顔映像、携帯端末の傾斜角度またはその組み合わせのうちの少なくとも1つを用いて、ユーザが、携帯端末を正しい姿勢で使っているか否かを判断する判断部と、判断部の判断の結果によって、ユーザが、携帯端末を正しい姿勢で使っていない場合、所定の警報を発する警報実行部と、を含む。
(もっと読む)
画像処理装置及び方法
【課題】所定の輪郭画像を有する入力画像データから、従来技術に比較して、輪郭画像の境界座標を高速で算出する。
【解決手段】複数の角度と当該各角度に対応する正接値とを格納する正接値テーブルを用いて、所定の輪郭画像を有する画像の輪郭境界点座標を検出する画像処理装置であって、主走査方向で、輪郭画像を有する画像の各画素のデータ値をデータメモリに入力しながら、各画素のデータ値が所定のしきい値以上の画素の輪郭境界点座標を検出し、検出した輪郭境界点座標に基づいて所定の中心座標に基づく各輪郭境界の正接値を計算して並列処理用メモリに格納することを副走査方向で実行し、並列処理用メモリ内の各輪郭境界点の正接値を、指定された角度に基づいて、正接値テーブルから得た正接値と並列処理により比較し、各正接値が一致したとき、一致した正接値に対応する角度の輪郭境界点座標を輪郭境界点座標として決定する。
(もっと読む)
対象画像検出デバイス、その制御方法、制御プログラム、および該プログラムを記録した記録媒体、ならびに対象画像検出デバイスを備えた電子機器
【課題】顔画像の検出結果を迅速に出力する。
【解決手段】デジタルカメラ10の制御部20は、撮影画像の中から顔画像を検出する対象画像検出デバイスである。制御部20は、撮影画像を取得する画像取得部22と、顔画像を検出するための複数の検出条件のうち、前回の検出条件とは異なる検出条件に決定する条件決定部23と、画像取得部22が取得した撮影画像に対し、条件決定部23が決定した検出条件で、顔画像を検出する顔検出部24と、検出された顔画像の位置情報を画像合成部17に出力する位置情報出力部26とを備えている。
(もっと読む)
画像処理装置及びX線診断装置
【課題】心筋組織の虚血・梗塞領域に対する正確な診断及び治療を支援する。
【解決手段】一実施形態における画像処理装置は、記憶部と、画像生成部と、表示制御部とを備える。記憶部は、造影剤により被検体の心筋組織が染影された第1のX線透過画像、及び、造影剤により被検体の心臓内腔が染影された第2のX線透過画像を記憶する。画像生成部は、記憶部に記憶された第1のX線透過画像及び第2のX線透過画像を合成した画像を生成する。表示制御部は、画像生成部により生成された画像を表示部に表示させる。
(もっと読む)
運動対象輪郭トラッキング装置、心筋運動解析装置、運動対象輪郭トラッキング方法および心筋運動解析方法
【課題】スライス画像の時間シーケンスの中から運動対象の輪郭を正確に抽出することができる運動対象輪郭トラッキング装置、心筋運動解析装置、運動対象輪郭トラッキング方法および心筋運動解析方法を提供すること。
【解決手段】実施形態の運動対象輪郭トラッキング装置では、輪郭トラッキング部は、運動対象のスライス画像の時間シーケンスに対して第一時間方向及び第二時間方向で輪郭トラッキングをそれぞれ行い、各スライス画像の第一輪郭及び第二輪郭を取得する。輪郭比較部は、所定のスライス画像における第一輪郭と初期輪郭との第一相似度、及び第二輪郭と初期輪郭との第二相似度を計算する。輪郭補正部は、第一相似度と第二相似度とで大きい方に対応する方向で得られた各スライス画像の輪郭を運動対象の輪郭とする。
(もっと読む)
被写体追跡装置及びその制御方法
【課題】 基準画像と入力画像との相関度に基づく被写体追跡を行う被写体追跡装置において、被写体の見えが変化する状況における被写体追跡の精度を向上させる。
【解決手段】 入力画像中の領域のうち、登録された第1および第2の基準画像の各々と最大相関度を有する領域を求める。そして第1の基準画像についての最大相関度と第2の基準画像についての最大相関度とを比較して、特定の被写体の領域を最大相関度を有する領域の中から判定する。そして、特定の被写体の領域を判定すると、判定した特定の被写体の領域に基づいて第2の基準画像を更新する一方、第1の基準画像は、更新しない。
(もっと読む)
画像処理方法、画像処理装置及びスキャナ
【課題】特定のオブジェクトの境界の内側にある、画像における領域を確保し、これにより特定のオブジェクト手の領域、即ち別のオブジェクトを画像から間接的に除く。
【解決手段】画像処理方法は、画像における前景のオブジェクトのエッジマップを決定するエッジマップ決定手段、エッジマップから境界線の候補を取得し、境界線の候補のうちで、前景のオブジェクトにおける特定のオブジェクトの境界を定義する境界線を決定する境界線決定手段、及び特定のオブジェクト以外の前記境界線を超える前記前景のオブジェクトを除く除去手段を備える。この方法は、特定のオブジェクトの境界を越えて捕捉された画像における、例えば手のような別のオブジェクトの画像を除去することに適用される。本発明の実施の形態に係る画像処理方法によれば、画像における特定のオブジェクトの境界は、正確に決定され、これにより境界を越える別のオブジェクトを除去して、その後の他の画像処理を容易にすることができる。
(もっと読む)
画像処理方法及び画像処理装置
【課題】取得画像のコンテンツに依存することなしに画像の歪み及び変形を補正することを可能にする画像処理方法等を提供する。
【解決手段】画像処理方法は、取得画像におけるオブジェクト領域の輪郭の角を推定し、オブジェクト領域から離れる方向に沿って所定角度範囲内でその推定された角からオフセットされる2つの点の間でオブジェクト領域の輪郭線を探し、オブジェクト領域の輪郭の最終的な角として輪郭線の交差点を決定し、オブジェクト領域の最終的な輪郭として前記最終的な角の間の輪郭線を決定する。
(もっと読む)
ひび割れ検出方法
【課題】撮影されたコンクリート表面に、実際のひび割れと類似した汚れや染み、撮影ムラ、型枠跡などが存在する場合でも、高い精度で実際のひび割れのみを検出することのできるひび割れ検出方法を提供すること。
【解決手段】ウェーブレット画像を作成するステップ、注目画素のウェーブレット係数が閾値よりも大きな場合は注目画素をひび割れと判定し、小さな場合は注目画素をひび割れでないと判定し、局所領域および注目画素を変化させながら注目画素のウェーブレット係数と閾値との比較をおこない、ひび割れと判定された画素に対してひび割れとノイズの判別処理をおこない、さらに輪郭線追跡処理をおこなうことで二値化画像を作成するステップ、残りのノイズを除去してひび割れ画像を作成するステップ、細線化処理を実行して細線化画像を作成し、ひび割れ幅を推定するステップ、からなるひび割れ検出方法である。
(もっと読む)
瞳孔径検出装置
【課題】眼瞼の下垂等による瞳孔径の欠けがあっても正確な瞳孔径を検出できる瞳孔径検出装置を提供する。
【解決手段】眼球に向けて光を発して患者の眼球を撮影し(ステップS1)、眼球画像から瞳孔部分を抽出し(ステップS2)、抽出された瞳孔を含む画像領域を水平方向に走査して情報をライン毎に記録し(ステップS3)、極大値を検出し(ステップS4)、瞳孔径を検出する前に開瞼した状態で撮像した検出前眼球画像と、瞳孔径を検出するために撮像された検出用眼球画像とを比較して、瞳孔径を推定する。
(もっと読む)
対象物追跡装置、対象物追跡方法、および制御プログラム
【課題】追跡対象の追随性と処理速度の高速化を両立できる対象物追跡装置を実現する。
【解決手段】この物体追跡装置は、第1フレームにおいて対象物の詳細輪郭モデルを生成する詳細輪郭モデル生成部30と、第2フレームにおいて複数の探索位置を設定する探索位置設定部31と、上記複数の探索位置の各々において上記詳細輪郭モデルからラフ輪郭モデルを生成するラフ輪郭モデル生成部32と、上記ラフ輪郭モデルの上記詳細輪郭モデルに対する尤度を判定する尤度判定部33と、上記尤度判定部33により判定された尤度に基づいて、上記複数の探索位置の中から探索位置を絞り込む探索位置絞込部34と、上記探索位置絞込部により絞り込まれた探索位置の中から、上記第2フレームにおける上記対象物の位置を特定する対象物位置特定部36とを備える。
(もっと読む)
オブジェクト追跡装置、方法、及びプログラム
【課題】オブジェクトを追跡する際に、オブジェクトの位置推定の精度を向上させる。
【解決手段】位置予測手段14は、2以上のフレーム画像間のオブジェクトの動きに基づいて、処理対象のフレーム画像におけるオブジェクトの位置を予測する。位置マップ生成手段15は、予測された位置の周辺の複数の位置とオブジェクトの存在確率を示す値との対応関係を位置マップとして生成する。特徴量計算手段16は、予測された位置の近傍の複数の位置のそれぞれでオブジェクトらしさを示す特徴量を計算し、アピアランスマップを生成する。位置推定手段17は、位置マップとアピアランスマップとを組み合わせ、処理対象のフレーム画像におけるオブジェクトの位置を推定する。
(もっと読む)
画像処理装置、画像処理方法、及びコンピュータプログラム
【課題】 撮影画像中の表示枠を切り出した切出し画像を生成する画像処理装置において、切出し画像を観察しているユーザに与える、表示枠の変動によるストレスを軽減できる画像処理装置を提供する。
【解決手段】 画像処理装置100は、撮影により画像を生成する画像生成部101と、画像中の移動体を囲む領域を検出枠として検出する人物検出部102と、検出枠の位置の履歴に基づいて、位置が振れないように、検出枠に対応する表示枠を決定する表示枠中心位置決定部107と、表示枠中心位置決定部107にて決定された表示枠の切出し画像を生成する切出し画像生成部110とを備えている。
(もっと読む)
画像処理方法及び画像処理装置
【課題】 ビットマップで表現された線画の補間を簡易に行う。
【解決手段】 対象線画Aと対象線画Bの輪郭情報をそれぞれ輪郭情報格納部3から読み込む(ステップS31及びS32)。対象線画A及びCのそれぞれについて、輪郭の一画素を一時間単位に対応させることにより(1画素=1t)、時間(t)対Xと、時間(t)対Yの各座標軸上に分解した写像を求める(ステップS33)。対象線画Aについて得られた上記写像と対象線画Cについて得られた上記写像について、時間軸調整を行う(ステップS34)。ステップS34において時間軸調整が行われた、対象線画Aに係る写像と対象線画Cに係る写像について、X軸写像同士の算術演算と、Y軸写像同士の算術演算を行なう(ステップS35及びS36)。演算により得られたX軸写像とY軸写像を合成して逆変換的に補間線画Bを生成する(ステップS37)。
(もっと読む)
1 - 20 / 210
[ Back to top ]