
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
2,001 - 2,020 / 2,719
撮像素子、撮像装置、撮像システム、撮像方法、モーションデータ生成システム、モーションデータ生成プログラム及びモーションデータ生成方法
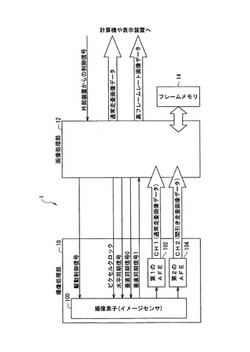
【課題】所定露光時間に対応した通常フレームレートの画像と、所定露光時間以下の複数種類の露光時間に対応した高速フレームレートの画像とを同時に撮像できる撮像素子及び撮像装置、並びに当該撮像装置を利用したモーションデータ生成システム、モーションデータ生成プログラム及びモーションデータ生成方法を提供する。
【解決手段】撮像装置1を、光電変換素子等から構成される撮像素子100と、撮像素子100からの画素信号を破壊読み出し方式及び非破壊読み出し方式の両方式を用いて読み出す撮像処理部10と、撮像処理部10から出力される、複数回の間引き走査において非破壊読み出し方式で読み出された間引き走査画像データに基づき高フレームレート画像データを生成する画像処理部12と、通常走査画素データ、間引き走査画像データ及び高フレームレート画像データ等の各種画像データを記憶するフレームメモリ14とを含んだ構成とした。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム

【課題】被写界深度を変更して撮影された複数の画像ついて、色にじみの発生の有無を判断する。
【解決手段】画像処理装置は、画像取得部と、エッジ検出部と、差分算出部と、判断部と、を備える。画像取得部は、露出量が実質的に同一であり、絞りが異なる複数の撮影条件をそれぞれ用いて、連続して撮影された複数の画像を取得する。エッジ検出部は、複数の撮影条件を用いて撮影された複数の画像のうちの第1の画像におけるエッジ部分を検出する。差分算出部は、第1の画像におけるエッジ部分の色成分と、複数の画像のうちの第1の画像より絞りが絞り込まれた撮影条件で撮影された第2の画像におけるエッジ部分の色成分との差分を算出する。判断部は、算出された差分を用いて、第1の画像における色にじみの有無を判断する。
(もっと読む)
対象物表面の欠陥検査方法
【課題】 この発明は,予め正常なチップ表面の画像を登録し,検査すべき対象物とのパターンマッチングによる検査によって対象物表面の欠陥の有無を検出する検査方法であり,対象物の各種マークがマーキングの状況により文字の字体の変形,傾き,位置ずれがあっても,各種マークの影響を受けず,対象物表面の欠陥を判別することができる。
【解決手段】
この対象物表面の欠陥検査方法は,異なる照明手段によって照らされた対象物の画像から各種マークとマーク以外の領域,及び対象物表面の欠陥の領域の濃淡値に関する2次元的分布から,対象物表面の欠陥のみの領域を判別する。これによって各種マークの字体の変動等に影響されず,対象物表面の欠陥の有無を判定することができる。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】入力画像に含まれる必要な情報を可能な限り残したままでノイズを効率的に除去するコアリング処理を実現できるようにする。
【解決手段】画像処理装置は、振幅の大きさと撮像ボケ量とのうちの少なくとも一方をパラメータとしてコアリング量を変更し(S2)、変更後のコアリング量に基づいて、入力画像データから抽出された高域周波数成分としての補正データを加工する(S3)。そして、画像処理装置は、入力画像データと、加工後の補正データとの差分データを生成し、その差分データをコアリング処理済データとして出力する(S4)。本発明は、テレビジョン放送受像機に適用可能である。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記憶媒体
【課題】LUTの占める記憶容量を少なくして精度の高いキャリブレーションを行う。
【解決手段】次元数の異なるLUTを複数組み合わせて併用してキャリブレーションを行うことにより、4色以上のインクを搭載するプリンタにおいて、特定の複数の色の画像データには、N次元LUT(N>=4)を使う場合より、容易に高精度なキャリブレーションを実現する画像処理装置。
(もっと読む)
対応を判別する、好ましくはシーンの三次元再構成をする方法および装置
【課題】画像データによる三次元シーンを再構成する方法は、一般に様々な方向および距離から記録されるシーンの多数の画像の空間対応の判別に基づく。本発明が取り組む問題は、計算量を低めながら、対応問題の解決に高い信頼性を与える方法、および装置を提供することである。
【解決手段】対応の判別に関連する画像領域を画像シーケンス内で判別し、画像範囲は関連画像領域から形成され、パラメータ化関数h(u,v,t)は、画素位置u、画素位置v、画像値gおよび時間tによって定義される空間R(uvgt)内の画像範囲のそれぞれにマッチングさせ、パラメータ化関数のパラメータを使用して、多数の画像シーケンスの画像範囲の類似度をとる。
(もっと読む)
障害物追跡装置及びその方法
【課題】検出された障害物候補領域に対してあいまい性を考慮して、障害物の正確な位置を検出する障害物追跡装置を提供する。
【解決手段】移動体に搭載されて障害物に関する時系列画像を取り込む画像入力部1と、時系列画像から現時刻の障害物候補領域を検出する障害物検出部2と、障害物の前時刻に関する状態仮説群を保持し、また、障害物候補領域の位置毎の観測仮説と障害物が検出されなかったとする観測仮説を合わせた観測仮説群を生成する仮説生成部3と、状態仮説群と観測仮説群との組み合わせ毎の尤度をそれぞれ計算し、まつ、尤度が最大になる観測仮説群と状態仮説群の組み合わせを選択し、この選択した状態仮説群を現在時刻の状態仮説群として更新する尤度計算部5と、現在時刻の状態仮説群の中で前記尤度が最大となる状態仮説を障害物の検出した状態とする仮説選択部6とを具備する。
(もっと読む)
画像データにおいて重要対象物を識別するための仮想スポットライト
車両を運転しているときに運転者を支援するために、支援システムがますます用いられている。この目的のために、カメラを用いて、車両の周辺エリアから画像データを記録し、画像データ(1)の少なくともいくつかが、対象物識別と画像処理に続いてディスプレイに表示される。画像データがカメラによって記録された後で、それらは、対象物(2、3)を識別するために、対象物識別を用いて処理される。このような方法で識別された対象物(2、3)の少なくともいくつかが、画像データ(1)をディスプレイに表示するときに強調表示される。この場合に、識別された対象物(2、3)は、表示される画像データ(1)が2つのタイプの領域に分割されるようにして、強調表示される。この場合に、第1のタイプの領域には、識別されて強調表示されることになる対象物(2、3)と、それに対応してこれらの対象物にそれぞれ直接隣接する周囲領域(2a、3a)と、が含まれる。次に、第2のタイプの領域には、第1のタイプの領域に割り当てられなかった画像データ(1)が含まれる。次に、画像データ(1)における対象物は、両方のタイプの領域における画像データが、異なるやり方で操作されて、強調表示される。 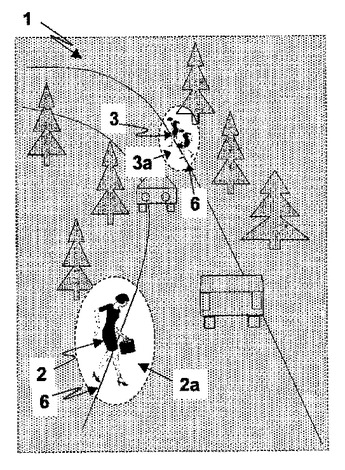 (もっと読む)
(もっと読む)
移動物体検知装置及びその方法
【課題】移動物体の検知処理に関わる負荷を低減可能な移動物体検知装置及びその方法を提供する。
【解決手段】ヒストグラム調整部は、低輝度領域に画素数が偏るヒストグラムについて、その輝度平均値と、この輝度平均値に対する輝度標準偏差とをそれぞれ求め、前記輝度平均値と前記輝度標準偏差との和を、前記輝度の上限値に変換すると共に、前記輝度平均値と前記輝度標準偏差との差を前記輝度の下限値に変換する。そして、前記ヒストグラムにおける前記和と前記差との間のヒストグラムパターン38aを、前記上限値と前記下限値との間でフルスケールに伸張して、前記フルスケールに伸張したヒストグラムパターン38b中で、前記各画素の輝度を前記上限値と前記下限値との間の所定の輝度に変換する。
(もっと読む)
カラーマッチング方法および画像処理装置
【課題】複数種の画像出力機器により構成される画像処理システムにおいて、比較的安価な色彩測定装置を用いて低コスト化を図りつつ、画像出力機器間の出力特性(色再現特性)について測色時の環境条件(環境光)を前提とするマッチングを実現することのできるカラーマッチング方法および画像処理装置を提供する。
【解決手段】デバイス間での画像出力の整合をとるために用いられるカラーマッチング方法として、モニタMTおよびプリンタPTに共通の色票(カラーチャート)を出力させる。そうして、これら出力された共通の色票について、それぞれ単一のデジタルスチルカメラ10により測色を行い、該測色の結果として得られる各装置(モニタMTおよびプリンタPT)の色再現特性を比較することにより、両者の色再現特性を整合(マッチング)すべく、適宜の色変換テーブル(LUT)を通じて、上記モニタMTの色再現特性を調整(出力補正)する。
(もっと読む)
移動物体検出装置および移動物体検出方法
【課題】特定の移動物体がカメラの視野内で長時間にわたって停止したような場合であっても、移動物体を正しく検出することが可能な移動物体検出装置を提供する。
【解決手段】現画像入力部10と、背景画像作成部30と、差分画像作成部51と、移動物体を認識する車両認識部54と、停止物体を認識する停止車両認識部56と、第1の停止物体が認識された後、第2の停止物体もしくは移動物体と第1の停止物体との間の距離が所定距離よりも近い場合、両者は同一であると認識する同一性認識部とを有し、背景画像作成部30は、第1の停止物体が認識された場合、第1の停止物体を含む領域を有する現画像の領域を背景画像中に取り込むことで更新済み背景画像を作成し、同一性認識部によって同一であると認識された場合、更新済み背景画像の領域を現画像もしくは背景画像に基づいて復元する。
(もっと読む)
3次元形状と3次元地形計測法
【課題】ヘリコプタなどの移動物体が異なる地点で撮影した基線長の長い画像を利用可能にするための撮像手段の運動制御法を提供し、その画像を用いた3次元形状または3次元地形測定法を提供する。
【解決手段】本発明の3次元地形計測法では、ヘリコプタなどの移動物体に装着し、被測定対象を撮影した画像情報を出力する撮像手段と、該撮像手段の撮像領域内にある点の距離を測定する装置と、該撮像手段を2自由度以上回転運動させるアクチュエータと、撮像手段の姿勢を測定する回転角センサと、移動物体の姿勢を測定するセンサを具備する測定装置を用いる。この装置を用いて、上記移動物体が移動しながら撮像手段の視線が被測定対象のある点を注視し続け、この点までの距離を測定する。その後,注視し始めるときの画像と、移動物体が所定の距離を移動した時点の画像と、注視点の3次元座標と、該撮像手段の姿勢情報を用いて画像上の各点の3次元座標を算出する。
(もっと読む)
深度マップを画像から判定する方法、深度マップを判定する装置
ウィンドウ・ベースのマッチングは、別々の向きから得られる画像から深度マップを判定するために使用される。固定マッチング・ウィンドウの組が、深度を判定する画像の点に対して使用される。マッチング・ウィンドウの組は、画像の点周りの画素のフットプリントを包含し、フットプリント(FP)の画素が属するマッチング・ウィンドウの平均数(O)は、フットプリントにおける画素数を15で除算した数に1を加えた数未満(O<FP/15+1)、好ましくは、フットプリントにおける画素数を25で除算した数に1を加えた数未満(O<FP/25+1)である。
 (もっと読む)
(もっと読む)
医療用画像処理装置及び医療用画像処理方法
【課題】ユーザによるポリープ等の病変部位の見落としを防止可能である医療用画像処理装置及び医療用画像処理方法を提供する。
【解決手段】入力される生体組織の像の二次元画像のエッジを抽出するエッジ抽出部と、前記二次元画像に基づき、前記生体組織の三次元モデルを推定する三次元モデル推定部と、前記三次元モデルの一部として推定された前記エッジが存在する各ボクセルの位置に基づき、形状特徴量の算出対象となる所定のボクセル群を抽出するボクセル抽出部と、前記所定のボクセル群のうち、少なくとも一部のボクセルについて前記形状特徴量を算出する形状特徴量算出部と、前記形状特徴量に基づき、三次元モデルが所定の形状として推定されたボクセル群を抽出する三次元形状抽出部と、前記ボクセル群を前記生体組織の三次元モデルにおける隆起形状を構成するボクセル群とする隆起形状検出部とを有する。
(もっと読む)
画像処理装置及び画像処理判定装置
【課題】原画像と目標画像と重み画像の三つの画像と、あらかじめ用意した複数種の画像処理フィルタによる処理を行うことによって、原画像から目標画像相当の画像を抽出する進化的画像処理方式において、適応度あるいは抽出画像の抽出具合を指定した数値指標を高速に演算処理するための画像処理装置に関する。
【解決手段】抽出画像群記憶部37は、原画像記憶部33に記憶された原画像を、フィルタ木記憶部36のフィルタ木の順に画像処理フィルタ群記憶部32に記憶されたフィルタによって処理を施してその結果である抽出画像を記憶し、適応度記憶部39は、最後に抽出した抽出画像と目標画像と重み画像をもとに適応度演算部38で算出した適応度を記憶して、制御部31から出力する。
(もっと読む)
視覚探索方法
【課題】 探索対象物以外にも物体が存在している場合に、他の物体による隠れを考慮して探索を行う視覚探索方法を提供する。
【解決手段】 視覚センサ(例えば、ステレオカメラ)により対象物を探索した場合に、対象物が見つからない場合、認識環境の3次元モデルを生成し(ステップS52)、認識物の投影面積、視点からの距離を算出し(ステップS53)、それらと対象物の形状データから定量評価を行い(ステップS54)、多因子統合評価により遮蔽物除去の優先順位を決定する(ステップS55)。
(もっと読む)
移動体動き算出装置
【課題】カメラが設置された移動体について、カメラ画像を用いてその動きを求める技術において、対応点がたとえ大きな誤差を含む場合であっても、精度良く、移動体動きを算出可能にする。
【解決手段】移動体動き算出装置100において、対応点算出部101はカメラ120によって撮影された画像間の対応点を算出する。第1の動き算出部102は画像内に所定の平面を仮定して、対応点を用いて移動体の第1の動きMaを算出する。第2の動き算出部103は第1の動きMaと対応点を用いて、第2の動きMbを算出する。
(もっと読む)
画像認識装置および画像認識方法
【課題】夜間などの走行時であっても、車両と歩行者との相対距離を正確に計測することができる画像認識装置および画像認識方法を提供することを目的とする。
【解決手段】車両の走行時に前方に存在する歩行者に向けて光を照射するヘッドライト12と、歩行者により反射された反射光に基づいて、歩行者の画像の輝度(画像濃度)を取得する画像濃度取得部70と、画像濃度取得部70により取得された画像濃度に基づいて、車両から歩行者までの相対距離を算出する歩行者距離算出部80とを備える。
(もっと読む)
後続車両監視装置、後続車両監視方法、後続車両監視プログラムおよび記録媒体
【課題】自車両の後方を撮影した映像を用いて、特定の車両が後続しているかを監視する。
【解決手段】後続車両監視装置100は、取得部101により、自車両の後方の映像を取得する。抽出部102は、取得した後方の映像から、後続車両情報を抽出する。さらに、判断部103により、抽出した後続車両情報と、あらかじめ登録した監視対象車両情報とを比較し後続車両が監視対象車両であるか否かを判断する。警告部104は、判断部103の判断結果に応じて自車両の搭乗者に警告をおこなう。また、監視対象車両情報は、登録部105によって登録することができる。
(もっと読む)
車両周辺監視装置
【課題】対象物の種別を高い信頼性で区別して判定することができる車両周辺監視装置、特に、対象物の中から歩行者と歩行者以外の対象物とを高い信頼性で区別して判定することができる車両周辺監視装置を提供する。
【解決手段】車両に搭載された撮像手段によって得られる画像から、車両の周辺に存在する物体を検出する車両周辺監視装置であって、前記画像から対象物を抽出する対象物抽出手段と、前記対象物抽出手段により抽出された対象物に対して、該対象物の上下方向に間隔を有する複数の高さ位置での該対象物の幅を算出する幅算出手段(STEP101〜104)と、前記幅算出手段により算出された幅に基づいて、前記対象物の種別を判定する対象物種別判定手段(STEP105)とを備える。
(もっと読む)
2,001 - 2,020 / 2,719
[ Back to top ]