
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
201 - 220 / 2,719
画像生成装置およびプログラム
【課題】演算量を著しく増大させることなく、効果的に高解像度化すること。
【解決手段】画像生成装置は、複数の画像を含む時系列画像のデータを取得する画像データ取得部と、画像領域内に複数のエリアを設定する設定部と、時系列画像のデータを用いて複数の画像より解像度が高い出力画像の画像データを生成する画像生成部とを備え、画像生成部は、時系列画像のデータに含まれる第1のデータ量のデータを用いて、複数のエリアのうちの第1エリアを高解像度化し、時系列画像のデータに含まれる第2のデータ量のデータを用いて、複数のエリアのうちの第2エリアを高解像度化する。
(もっと読む)
印刷物検査用センサのデータ変換方法及びデータ変換装置

【課題】構造の異なる新たなセンサに変更した場合でも変更前のセンサ用基準データを利用して印刷物を検査できるようセンサデータを変換する。
【解決手段】ラインセンサによって計測したデータ上に、ポイントセンサによる検査領域の計測を再現する領域を設定し、設定された領域に含まれる画素値を重み係数によって変換して検査データを生成するために、必要な領域設定パラメータや重み係数をシミュレーションによって決定する。シミュレーションは、ポイントセンサで計測に利用する光や投受光素子の状態を考慮して設定したパラメータに基づいて行う。決定したパラメータ及び重み係数を利用して検査媒体をラインセンサによって計測したデータを変換し,ポイントセンサ用基準データと比較可能な検査データを生成する。
(もっと読む)
車両用情報伝達制御装置、及び、情報伝達制御方法
【課題】運転行動に不要な情報に誘目され、運転行動を阻害されることを防止するための技術を提供する。
【解決手段】車載カメラで自車両前方の運転視界画像を撮像し(S101)、その運転視界画像上において運転者の注意を強く引く高誘目性領域を推定する(S102)。つぎに、推定した高誘目性領域が運転行動に必要な情報であるか否かを判定する(S103)。要否の判定は、運転視界画像上の高誘目性領域と、注意領域認識部30において認識された注意領域との位置関係に基づいて行う。そして、前記要否判定の結果において運転支援画像上において運転行動に不要で、かつ誘目性の高い領域が存在する場合(S104:YES)、運転視界画像から特定された情報提示フィルタリングの対象となる領域に対応するマスク表示部の該当領域に、運転視界の視認性を低下させるマスク画像を表示する(S105)。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
画像処理装置および画像処理方法、プログラム
【課題】 複数の視点から撮像した撮像画像データに基づいて合成画像を生成する際に、合焦する領域がぼけてしまうのを抑制し、該合焦する領域外のぼけた領域の画質を向上させることを目的とする。
【解決手段】 領域ごとの合焦の状態を示す合焦状態情報に基づいて、撮像画像データと補間画像データとに対する重み係数を領域ごとに設定し、その重み係数に基づいて、撮像画像データと補間画像データとを合成する。合焦する領域における補間画像データに対する重み係数は、合焦する領域以外の領域の中の少なくとも一部の領域における補間画像データに対する重み係数よりも小さい。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び情報処理システム
【課題】視点が異なる複数の装置によって被写体が撮像された際に、容易に同一又は類似の被写体の抽出を行う方法を提案する。
【解決手段】被写体を撮像する撮像部と、前記撮像部によって撮像される前記被写体の動きの変化を検出する動き検出部と、前記動き検出部によって前記動きの変化が検出された変化タイミングに関する第1タイミングデータを生成するデータ生成部と、前記撮像部による撮像中に、他の装置によって撮像される被写体の動きが検出された変化タイミングに関する第2タイミングデータを、前記他の装置から受信する受信部と、前記データ生成部によって生成された前記第1タイミングデータと前記受信部によって受信された前記第2タイミングデータとに基づいて、前記撮像部によって撮像された被写体と前記他の装置によって撮像された被写体とが同一又は類似の被写体か否かを判定する判定部と、を備える、情報処理装置。
(もっと読む)
表示制御装置および方法、並びにプログラム
【課題】フリーカーソル型のユーザインタフェースにおいて、ユーザの操作性を向上させる。
【解決手段】撮像部は、レンズより入射される光のうちの可視光に対応する画素信号に基づくRGB画像と、レンズより入射される光のうちの赤外光に対応する画素信号に基づくIR画像を出力し、ROI設定部は、RGB画像に基づいて、IR画像における赤外光光源の移動領域を設定し、表示制御部は、移動領域内での赤外光光源の移動に応じて、表示部上のカーソル移動量を制御する。本技術は、例えば、視聴者の視聴状態を監視するテレビジョン受像機に適用することができる。
(もっと読む)
画像補正方法、および立体画像撮影装置
【課題】被写体距離に応じて、取得した左右2枚の画像間での上下ズレを低減することを可能とする画像補正方法、および立体画像撮影装置を提供する。
【解決手段】Δθによる補正が行われた左目用画像aおよび右目用画像aの両方を、任意の角度Δφ回転させ、被写体aの2個の特徴点の、左目用画像aと右目用画像aとの間での上下方向における差分ΔYを算出する。左目用画像bおよび右目用画像bの両方を、ΔθおよびΔYを相殺するように、かつΔφ回転させて補正し、被写体bの特徴点の、左目用画像bと右目用画像bとの間での上下方向におけるズレΔY´を算出する。以上の操作を、複数のΔφについて行い、ΔY´が最小となるΔφおよびΔYを求める。
(もっと読む)
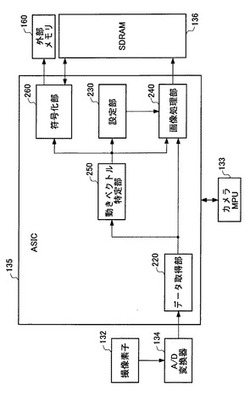
環境認識装置および環境認識方法
【課題】夜間や雨等、光源が拡散し易い環境において、壁でないものを壁と誤判断することを抑制する。
【解決手段】環境認識装置130は、検出領域内に存在する対象部位の、自車両に対する相対距離を含む位置情報を取得する位置情報取得部160と、自車両の進行方向に垂直な水平距離の差分および自車両の進行方向に平行な相対距離の差分が第1所定距離内に連なる複数の対象部位をグループ化して対象物とするグループ化部162と、対象物を構成する複数の対象部位が、自車両の進行方向に垂直な面に対して所定角度以上に傾斜する傾斜面を形成すると、壁の候補である壁候補と判断する候補判断部164と、自車両の進行方向に垂直な水平距離の差分および自車両の進行方向に平行な相対距離の差分が、第1所定距離より長い第2所定距離内に連なる複数の壁候補を、壁であると判断する壁判断部166と、を備える。
(もっと読む)
画像処理装置及びその制御方法
【課題】 監視対象オブジェクトの個数に上限値を設けながらも、オブジェクト数の個数が上限値以上になった場合であっても、監視対象オブジェクトを含まない特定領域が発生することを抑制する。
【解決手段】 撮像して得られた画像内を解析し、許容最大数Nmax以下の個数であって、予め設定された最小検知サイズ以上のサイズを持つオブジェクトを検出する(S102)。そして、認識されたオブジェクトの数が、許容最大数Nmax以上になった場合には前記最小検知サイズをより大きなサイズに変更する(S105)。また、認識されたオブジェクトの数が、目標最小数Nmin以下になった場合には最小検知サイズをより小さな値に変更する(S107)。
(もっと読む)
角膜反射判定プログラム、角膜反射判定装置および角膜反射判定方法
【課題】正確に角膜反射領域を判定すること。
【解決手段】角膜反射判定装置100は、画像データから目の領域を抽出し、画像データの目の領域から角膜反射領域の候補を検出する。角膜反射判定装置100は、複数の角膜反射領域の候補のうち、画像データの各フレームで断続的に抽出される角膜反射領域を判定する。これに対して、角膜反射判定装置100は、画像データの各フレームで連続して抽出される角膜反射領域の候補を、眼鏡のレンズ等による反射として除外する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】少ない演算量で手ぶれを補正すること。
【解決手段】画像処理装置は、補正部と、生成部と、除去部と、合成部とを備える。補正部は、第1の露光時間で第1の画像を撮影するとともに、第1の露光時間よりも短い第2の露光時間で第2の画像を撮影する撮影部から、第1の画像と第2の画像とを取得するとともに、取得した第1の画像と第2の画像との位置ずれを補正する。生成部は、補正部により補正された第1の画像と、該補正部により補正された第2の画像との差分画像を生成する。除去部は、生成部により生成された差分画像からノイズを除去する。合成部は、除去部によりノイズが除去された差分画像を、第1の画像と合成する。
(もっと読む)
画像処理装置および画像処理方法
【課題】高詳細な画像を得るために被写体をフラッシュ撮影すると、実際の環境光下では観察されるであろう被写体の陰影が消失して立体感が損なわれる場合がある。
【解決手段】S1でのユーザ指示に基づき、S2で被写体をフラッシュ撮影した第1の画像データと、蛍光灯などの観察光源下で撮影した第2の画像データを取得する。そしてS3で第1および第2の画像データの照明ムラを補正した後、S4で第1および第2の画像データにおける平均明度の比を用いて、画素ごとの明度補正パラメータを算出する。そしてS5で、該明度補正パラメータを用いて第1の画像データにおける画素ごとの明度を補正する。これにより、観察光源下で被写体に生じる陰影が再現された、高詳細な撮影画像が得られる。
(もっと読む)
3D自動色補正装置とその色補正方法と色補正プログラム
【課題】カラーチャート等の参照板を用いなくても、低コストかつ安定して、映像から自動的に色補正パラメータを算出し、左右映像間の色補正を遂行することができる3D映像のための自動色補正装置を提供することを目的とする。
【解決手段】撮影して取得した二つの映像間において色補正を遂行する色補正装置において、取得した二つの映像から画素値の色ヒストグラムを各々算出する色ヒストグラム算出部と、色ヒストグラム算出部が算出した色ヒストグラムから確率密度関数を各々算出する確率密度関数算出部と、確率密度算出部が算出した各々の確率密度関数からロバストM推定による色補正パラメータを算出する色補正パラメータ算出部とを備え、色補正パラメータ算出部が算出した色補正パラメータを、取得した二つの映像の少なくともいずれか一方に適用して色補正する色補正装置とする。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】画像変形処理とフィルタ処理とを連続して行う際に、画質の低下を防ぐ。
【解決手段】入力画像中の各画素位置のうち、変形処理により変形画像中の着目画素位置に写像される画素位置が存在するか否かを判定する。変形画像を構成する各画素位置について画素値を設定することで得られる変形画像から、出力画像の処理画素位置における画素の画素値を算出する。存在すると判定した場合には、変形画像における処理画素位置近傍の画素群の画素値とフィルタ係数群との畳み込み演算によって得られた画素値を、出力画像における処理画素位置における画素の画素値として設定する。存在しないと判定した場合には、変形画像における処理画素位置の画素の画素値又は予め定められた画素値を、出力画像における処理画素位置における画素の画素値として設定する。出力画像の各画素位置について画素値を設定することで得られる出力画像を出力する。
(もっと読む)
入力装置
【課題】操作者とノイズとなる背景とを正確に識別して、カメラの撮影範囲内に操作者以外の人が居て手を動かした場合でも誤動作しない入力装置を提供する。
【解決手段】右眼用撮像装置Aと右眼用撮像装置Bと並べて配置し、距離測定手段Cにて両眼視差法によりそれぞれの撮像装置A、Bが撮像した被写体までの距離を測定する。そして、被写体判別手段Dは、測定した距離を両方の撮像装置A、B間の間隔に基づいて両眼視差法により割り出して予め設定してある奥行き距離と比較し、被写体までの距離と奥行き距離とが所定の許容範囲内で一致していると、操作指示生成手段Eはこの被写体の動きを検出し、この検出結果に応じた操作指示を生成する。
(もっと読む)
画像処理方法、画像処理装置、集積回路およびプログラム
【課題】入力画像を適切に高解像度化することができる画像処理方法を提供する。
【解決手段】画像処理方法は、入力画像に含まれるエッジに沿った方向であるエッジ方向を特定する方向特定ステップS1002と、そのエッジの少なくとも一部を含む領域である使用領域の形状を、特定されたエッジ方向に応じて決定する領域決定ステップS1003と、決定された形状の使用領域内の画像に類似する類似画像を検索する画像検索ステップS1005と、入力画像に高周波成分が含まれるように、その入力画像に対して類似画像を用いた解像度変換処理を行うことによって、出力画像を生成する画像生成ステップS1005〜S1007とを含む。
(もっと読む)
奥行調整が可能な立体映像表示装置
【課題】 背景領域に過度に奥行範囲を割り当てることなく、手前側の奥行感が強調され、自然な奥行感を再現できる立体映像表示装置を提供する。
【解決手段】1実施形態の立体映像表示装置は、入力画像から奥行値を生成する奥行情報生成部11と、前記奥行値を調整し、調整された奥行値を生成する奥行調整部12と、前記入力画像及び前記調整された奥行値から、右視点用画像及び左視点用画像を生成する画像生成部と、前記右及び左視点用画像に基づいて、立体映像を表示する画像表示部14と、を備え、前記奥行調整部12は、各奥行値の頻度に対して、奥行値に応じた重み付けを行うことによって奥行値の重み付きヒストグラムを求め、該ヒストグラムから得られる重み付き累積ヒストグラムを用いて奥行値を調整することを特徴とする。
(もっと読む)
人体検出装置
【課題】人体やペットの移動方向を確実に得られることができるようにするとともに、移動領域の長手方向を確実に得られることができるようにすることを目的とする。
【解決手段】住宅内の床面を撮影するとともに、撮影方向が床面と垂直になる位置に撮影装置1を設置し、撮影装置1によって撮影された画像の変化領域を解析して移動物体の移動方向を取得するとともに、取得した移動方向と変化領域の長手方向とが一致しなかった場合に、人体判定装置2にて人体が動いたと判定するようにしている。これにより、人体を検出するために使用される撮影装置1によって住宅内の床面が真上から撮影されるので、人体やペットが移動する際に撮影装置1に近付いたり遠ざかったりすることがなくなり、人体やペットの移動方向を確実に得ることができるとともに、移動領域の長手方向を確実に得ることができる。従って、人体とペットとをより確実に区別することができる。
(もっと読む)
画像処理装置及び画像処理方法
【課題】ステレオ画像やマルチ画像について、画像信号が含む撮像装置に起因するノイズを効率よく除去する画像処理装置及び画像処理方法を提供する。
【解決手段】実施形態において、画像処理装置は、計算部と、判定部と、ノイズ除去部とを具備する。計算部は、第1の画像信号として入力される第1の画像の任意の画素と、第1の画像信号と同一対象物について同時に取得される第2の画像信号として入力される第2の画像の任意の画素との対応を求める。判定部は、計算部の計算結果に基づき、第1の画像の任意の画素と第2の画像の任意の画素とを比較し、それぞれの画素がノイズ画素であるか、ノイズ画素とは異なる非ノイズ画素であるか、を判定する。ノイズ除去部は、判定部の判定結果に従い、ノイズ画素を補正する。
(もっと読む)
201 - 220 / 2,719
[ Back to top ]