
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
161 - 180 / 2,719
画像生成装置、画像生成方法及びプログラム
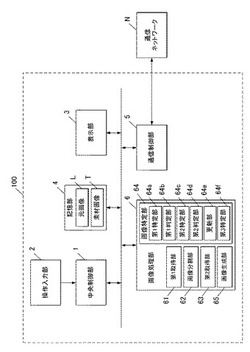
【課題】元画像の輪郭を適正に表現したモザイク画像を生成する。
【解決手段】画像生成装置100であって、モザイク画像の元となる一の元画像を取得する第1取得部61と、この第1取得部により取得された元画像を複数の画像領域に分割する画像分割部62と、複数の素材画像を取得する第2取得部63と、複数の画像領域及び複数の素材画像の各画素の色情報及び画素値の変化の度合に基づいて、複数の画像領域の各々について、複数の素材画像の中から各画像領域に類似する類似素材画像をそれぞれ特定する画像特定部64と、この画像特定部により特定された類似素材画像の各々をそれぞれが対応する画像領域の一の画像における各位置に組み合わせて合成し、元画像のモザイク画像を生成する画像生成部65と、を備えている。
(もっと読む)
画像処理装置およびその方法

【課題】 電子ズーム処理された画像よりも高解像、高精細な画像の提供を可能にする。
【解決手段】 レンズ101と撮像デバイス102は、被写体の画像データを撮像する。カメラ信号処理部105は、入力されるズーム倍率情報に従い、撮像デバイス102が出力する画像データが表す画像の一部を拡大処理したズーム画像データを生成する。撮像モデルデータベース108は、レンズ101の光学系による画像の劣化情報、および、拡大処理による画像の劣化情報を撮像モデル情報として格納する。ファイル作成部112は、拡大処理のオンオフを示す情報、ズーム倍率情報、撮像モデル情報、画像データ、ズーム画像データを格納したデータファイルを作成する。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】コントラストが低い画像および自己相関が高い画像が対象であっても、高速かつ高精度の対応点の探索が実現され得る技術を提供する。
【解決手段】画像取得部によって第1画像および第2画像が取得され、第1設定部によって第1画像に基準点が設定され、第2設定部によって第2画像に探索基準点が設定される。次に、検出部によって、第1画像において基準点を基準として設けられる基準領域と、第2画像において探索基準点を基準として設けられる参照領域とに係る相関演算の結果に基づき、第2画像において基準点に対応する対応点が検出される。そして、判定部によって、第2画像における探索基準点と対応点との位置関係に基づいて、対応点の信頼度が判定される。
(もっと読む)
車両用外界認識装置及びそれを用いた車両制御システム
【課題】例えば薄暮のように昼間と照明条件が異なるシーンにおいて先行車両を正しく検出することができる車両用外界認識装置を提供する。
【解決手段】車両外形を検出するとともに、車両尾灯を検出し、車両外形と車両尾灯が同期して動いているものを車両と判定する。
(もっと読む)
画像処理装置と画像処理方法およびプログラムと記録媒体
【課題】簡単な構成で容易に画質の改善を行うことができるようにする。
【解決手段】周波数分離部20は、入力画像の縮小と、縮小された入力画像を縮小前の画像サイズに戻して縮小前の入力画像との差分の算出を行い、入力画像を周波数帯域の異なる縮小画像と差分画像に分離する。画像処理部30は、縮小画像と差分画像の少なくとも何れかの画像処理を行う。合成処理部40は、少なくとも一方が画像処理されている縮小画像と差分画像を等しい画像サイズとして合成する。大容量のメモリやバッファを設ける必要がなく、簡単な構成かつ低処理コストで容易に画質の改善を行うことができる。
(もっと読む)
ゲームシステム、プログラム、及び情報記憶媒体
【課題】プレーヤの撮影画像の新たな利用形態を実現すること。
【解決手段】業務用ゲーム装置1300は、イメージセンサモジュール1326を備え、少なくともプレイポジションにいるプレーヤを撮影範囲に含む装置前方画像を撮影できる。また、装置前方画像に写っているプレーヤの顔表情を認識し、その認識結果を用いてゲーム進行及び/又はゲーム演出を制御する。例えば、音楽ゲームの場合、プレイ曲の「サビ」の部分で特定の顔表情をするように提示する「顔表情お題」を行い、「サビ」部分をプレイ中のプレーヤの顔表情が提示された顔表情に適合する場合に特典を付与したり、特別な演出表示を実行する。
(もっと読む)
画像処理装置および画像表示システム
【課題】標本の高さ方向が異なる画像において、高さ方向に垂直な平面間の撮像領域のずれを補正して、高精度の全焦点画像および3次元画像を構築することができる画像処理装置および画像表示システムを提供すること。
【解決手段】固定された軸に沿って移動しながら撮像された一群の画像をもとに全焦点画像および/または3次元画像の構築処理を行う画像処理部33であって、一群の画像において、各画像における軸に垂直な平面内のずれの検出を行なう検出部331と、検出部331の検出結果に応じてずれの補正を行う補正部332と、固定された軸に沿って移動して撮像された画像および/または補正部332で補正された画像を含む一群の画像をもとに、全焦点画像および/または3次元画像を構築する画像構築部333と、を備えた。
(もっと読む)
画像処理装置およびその方法
【課題】 簡易な方法によりスクリーン処理を適切に補正し、良好なハーフトーン処理結果を出力する。
【解決手段】 上記課題を解決するために、本発明の画像処理装置は、画像データに対してスクリーン処理により第一の量子化データを生成する第一の量子化手段と、前記画像データの低周波成分と前記第一の量子化手段で得られたスクリーン処理後データの低周波成分との差分を算出する差分算出手段と、前記差分に応じて、前記第一の量子化手段による結果または所定値の何れかを出力する出力手段と、前記第一の量子化データと前記差分の和から前記出力手段による出力データを引いた値に対して、前記第一の量子化手段とは異なる方法により量子化し、第二の量子化データを生成する第二の量子化手段と、前記第二の量子化データを前記第一の量子化データに加算する加算手段とを有する。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】多重解像度戦略を用いた対応点探索処理において信頼度が局所的に悪化した場合における総合信頼度を改善する。
【解決手段】画像処理装置は、複数の階層にわって複数の解像度で階層的に表現された複数の基準画像と複数の参照画像とを取得する取得部と、注目点を複数の基準画像にそれぞれ設定する設定部と、注目基準画像の注目点に対応した注目参照画像の対応点を探索する対応点探索処理を各階層において逐次行なう探索部と、各階層における対応点探索処理の結果に関する各信頼度を決定する決定部と、各信頼度の全体的な状況を表現した基準値を、互いに隣接した各階層組みのそれぞれの間にわたる各信頼度についての各信頼度変化のうち一部の信頼度変化を他の信頼度変化よりも強調した補正値を用いて補正することにより、各信頼度を総合した総合信頼度を算出する演算部とを備える。
(もっと読む)
車両用画像認識装置
【課題】本発明は、車両用画像認識装置に係り、自車両の発進時に自車両の移動を伴うことなく単一のカメラを用いて自車両周辺の状態を判定することにある。
【解決手段】自車両周辺を撮影するカメラと、自車両停車時における自車両周辺の停車時状態(具体的には、自車両停車時におけるカメラの撮像画像、及び、自車両停車時にカメラが撮影する方向に存在する障害物の有無及び位置)を示す情報を記憶手段に記憶させる停車時記憶制御手段と、自車両発進時、カメラの撮像画像と記憶手段に情報記憶されている停車時状態とに基づいて、自車両周辺の状態を判定する状態判定手段と、を設ける。
(もっと読む)
画像処理装置および画像処理方法
【課題】素材画像を配置すべき分割領域の形状と異なる形状の素材画像を用いる場合にも、仕上がり品質の高いモザイク画像を生成することができるようにする。
【解決手段】
目標画像をサイズの異なる複数の領域に分割する領域分割手段と、前記領域分割手段により分割された各領域の面積に基づいて素材画像のサイズを変更するサイズ変更手段と、前記領域分割手段により分割された各領域の色成分に基づいて、分割された各領域にサイズが変更された素材画像を配置する素材画像配置手段と、前記素材画像配置手段が配置する素材画像のうち、互いに重なりが生じる素材画像は、面積の小さな素材画像の方が面積の大きな素材画像よりも上になるように制御する制御手段とを設け、画像の領域に応じて適切なブロックサイズに分割するとともに、重ね方まで考慮するようにする。
(もっと読む)
画像処理装置及び画像処理方法
【課題】重なり領域を有する2つの入力画像を張り合わせた画像において、重なり領域と重なりのない領域との間を滑らかにつなぐこと。
【解決手段】画像処理装置は、第一入力画像を基準画像として用い、第二入力画像に対して第一位置合わせを実行し、第二入力画像における基準画像の中の重なり領域に位置する各第一画素とマッチングをとる第二画素を探すための第一位置合わせ装置と、第一画素と第二画素の位置に基づいて出力画像における第一画素に対応する出力画素の位置を計算し、その中の第一画素と第二画素の位置に対してそれぞれ重み付けを行い、第一画素は、基準画像の重なりのない領域からの最短距離が小さければ小さいほど、第一画素の位置に対する重みは大きくなるような関係を成すための出力画素位置決定装置と、第一画素と第二画素の少なくとも一方の画素値に基づいて出力画素の画素値を計算するための出力画素値決定装置とを備える。
(もっと読む)
瞼検出装置、瞼検出方法及びプログラム
【課題】ドライバの瞼を正確に検出する。
【解決手段】ドライバの顔が写る画像から検出され、ペアリングされたエッジ同士の距離dを順次算出する。そして、算出した距離dの変化に基づいて、瞼のエッジのペアとしての確度が低い候補を除外していき、最終的に残ったエッジのペアを、上瞼のエッジと下瞼のエッジのペアとして検出する(S208)。このため、瞼のエッジに近い特徴だけでなく、瞼としての振る舞いを考慮した検出を行うことができる。したがって、ドライバの瞼のエッジを、正確に検出することが可能となる。
(もっと読む)
画像出力装置、画像出力方法、およびプログラム
【課題】従来、画像を視るユーザにとって、刺激が大きすぎたり、目が疲れやすい等、不都合があった。
【解決手段】入力画像を取得する入力画像取得部と、前記入力画像に含まれる被写体の目標とする属性値である1以上の目標属性値を取得する目標属性値取得部と、前記入力画像を用いて構成される出力画像に含まれる前記被写体の1以上の属性値を取得する属性値取得部と、前記目標属性値取得部が取得した1以上の目標属性値と、前記属性値取得部が取得した1以上の属性値との差を示す1以上の差情報を取得する差情報取得部と、前記1以上の差情報が、予め決められた条件を満たさない場合、前記入力画像を用いて構成される出力画像の出力態様を変更し、出力する画像出力部とを具備する画像出力装置により、画像を視るユーザにとっての不都合を小さくできる、または不都合をなくすことができる。
(もっと読む)
人体動作の認識の方法、装置、及びプログラム
【課題】
異なる動作や異なる個体に対応する人体動作周期及び人体動作を特定すること。
【解決手段】
本発明は人体動作周期を特定し、及び人体動作を認識する方法並びに装置を開示する。ビデオにおける人体動作周期を特定する方法は、所定の探索範囲内において人体姿勢が現在のフレームと類似するフレームを探索し、探索範囲内において人体姿勢が現在のフレームと類似するフレームを探索できた場合に、現在のフレームと前記人体姿勢が現在のフレームと類似するフレームとの間の時間長さをビデオにおける人体動作周期とすることを含む。異なる動作や異なる個体に対して、相応する人体動作周期を特定することによって、時間的・空間的特徴をより正確に抽出し、より正確な人体動作の認識を実現することができる。
(もっと読む)
画像差分検出装置及び画像差分検出プログラム
【課題】差分画像を検出する画像間に位置ずれが発生しても意図した差分画像を検出できる画像差分検出装置及び画像差分検出プログラムを提供することを課題とする。
【解決手段】撮影手段により撮影された画像間の差分を検出する画像差分検出装置10であって、異なるタイミングで撮影された第1及び第2の画像の何れか一方をシフトしながら第1及び第2の画像間の差分画像を検出する画像差分演算手段32と、第1及び第2の画像間の差分画像のうち、第1及び第2の画像間の差が最も少ない差分画像を出力する画像差分評価手段33と、第1及び第2の画像間の差が最も少ない差分画像と第1又は第2の画像とを合成した合成画像を出力する画像合成手段34とを有することにより上記課題を解決する。
(もっと読む)
画像処理装置、撮像装置、制御方法、及びプログラム
【課題】複数の画像データを加重加算する領域で発生する位置ズレを低減することを可能とした画像処理装置、撮像装置、制御方法、及びプログラムを提供する。
【解決手段】撮像装置の画像処理部103の位置ズレ検出部106は、入力画像データ間の位置ズレ量を検出する。合成比率設定部107は、入力画像データを合成する際の合成比率を設定する。位置ズレ補正部108は、位置ズレ検出部106により検出された位置ズレ量と合成比率設定部107により設定された合成比率から座標変換係数を算出し、入力画像データに座標変換係数を用いて座標変換を施すことで、入力画像データ間の位置ズレを補正する。更に、入力画像データを加重加算する領域を優先させて位置ズレの補正を行う。画像合成部109は、位置ズレが補正された入力画像データを合成比率で合成する。
(もっと読む)
画像復号プログラムおよび画像復号方法
【課題】復号画像の画質の劣化を防止する。
【解決手段】復号部150cは、復号鍵データ140aを基にして、暗号化画像データ140bから復号画像データ140cを生成する。判定部150dは、暗号化画像データ140bの画素ブロックの組から第1の相関値を求め、復号画像データ140cの画素ブロックの組から第2の相関値を求める。そして、判定部150dは、第1の相関値と第2の相関値との関係から、復号画像データ140cに色にじみが発生しているか否かを判定し、色にじみが発生している場合には、補正部150eは、復号画像データ140cを補正する。
(もっと読む)
追尾装置及び追尾方法
【課題】顔部が非検出となったり、顔部の検出の精度が低下したりした場合であっても、以後のフレームにおける追尾精度を落とすことの無い追尾装置及び追尾方法を提供すること。
【解決手段】追尾対象の顔部を、顔検出回路1307を用いた追尾処理と、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。また、追尾対象の顔周辺部を、顔検出回路1307を用いた追尾処理によって検出された顔部の位置から推定して追尾するとともに、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。次フレームの追尾処理の開始の位置を顔検出回路1307における顔検出の結果と顔部信頼性向き判定回路1308における顔部の向きの判定結果に応じて変更する。
(もっと読む)
画像処理方法、画像処理装置及びコンピュータプログラム
【課題】画像間の対応付けが困難な場合であっても、奥行き推定誤差を抑制し、高品質な仮想視点画像を合成すること。
【解決手段】複数の異なる視点から被写体を撮影した多視点画像に基づいて、任意の仮想視点位置から見た被写体の画像を合成する画像処理方法である。多視点画像に対して各画素の奥行きに対する尤度を算出し、尤度に基づいて個々の画素の奥行きを推定し、高精度推定画素の奥行き推定結果を用いて、画像特徴から奥行きに対する尤度を推定するための推定関数を算出し、補正対象画素に対して推定関数を用いて尤度の補正を行い、補正後の尤度を用いて画像全体の奥行きを再推定し、再推定した奥行きと、多視点画像とに基づいて、仮想視点位置に応じた被写体の画像を合成する。
(もっと読む)
161 - 180 / 2,719
[ Back to top ]