
Fターム[5B057DC32]の内容
Fターム[5B057DC32]の下位に属するFターム
辞書画像との対比 (3,074)
Fターム[5B057DC32]に分類される特許
1 - 20 / 2,719
開閉眼検出装置
検査装置
車両用運転支援装置
画像処理装置および画像処理方法、プログラム
ダイナミックグリッドによるバンドベースのパッチ選択
画像処理装置、画像処理方法及びプログラム
焦点ずれしたピルボックス画像を利用して深度推定を行うためのシステム及び方法
多重解像度手順を利用してロバストな深度マップを生成するためのシステム及び方法
X線撮影装置のX線照射制御部、X線制御装置、X線撮影装置の制御方法、プログラム及び記憶媒体
情報端末装置
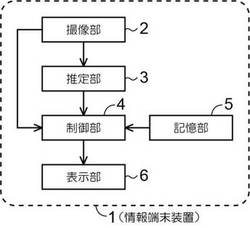
【課題】マーカや特別なセンサを用いることなく、撮像対象の位置及び姿勢を推定して表示部を制御する情報端末装置を提供する。
【解決手段】撮像部2と、情報を表示する表示部6と、表示部6で表示する情報を記憶する記憶部5とを備える情報端末装置1において、撮像部2で撮像した画像より撮像対象の撮像部2に対する位置及び姿勢を推定する推定部3と、記憶部5から読み出して表示部6で表示する情報を、推定された位置及び姿勢に応じて制御する制御部4とを備え、推定部3は、画像より撮像対象の複数の線分を抽出する線分抽出部30と、抽出された複数の線分と、撮像対象の所定配置の画像において撮像対象に対して予め設定された複数の基準線分との平面射影変換の関係を求めて、該写像関係より位置及び姿勢を推定する姿勢推定部34とを含むように構成する。
(もっと読む)
画像間差分装置および画像間差分方法

【課題】外乱の影響を受け難いロバストな画像間差分技術を提供する。
【解決手段】勾配方向算出部14aは、画像を構成する各々の画素の画素位置における画素値の勾配方向を求める。ヒストグラム生成部14bは、各々の画素を対象画素として設定するとともに、対象画素の周囲にヒストグラム算出領域を設定し、ヒストグラム算出領域に含まれる画素の画素位置における勾配方向の度数分布を対象画素の画素位置におけるヒストグラムとして生成する。画素差分部14cは、第1の画像の差分対象画素の画素位置におけるヒストグラムと、第2の画像の比較対象画素の画素位置におけるヒストグラムと、の差分値を差分対象画素と比較対象画素との画素差分値として算出する。画像差分部14は、差分対象画素の画素位置における画素値を画素差分値に基づいて設定することにより差分画像を生成する。
(もっと読む)
画像処理装置、顕微鏡システム、画像処理方法、及び画像処理プログラム
【課題】生体組織標本の切片標本を撮像して得られた一連の標本画像に対し、もとの生体組織標本をスライスした順序に対応した並び順を付与することができる画像処理装置等を提供する。
【解決手段】生体組織標本をスライスし染色を施した複数の切片標本に対応する複数の画像に対し、該画像内の各画素の色特徴量に基づいて少なくとも1種類の組織構成要素を抽出し、該種類ごとの画像である要素画像を作成する要素画像作成部452と、複数の画像間で、同じ種類の要素画像の連続性を評価する連続性評価アルゴリズム453a、453b、…を有し、連続性の評価結果に基づいて、複数の画像の並び順を判定する連続性評価部453とを備える。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】2眼カメラの横持ち撮影、縦持ち撮影いずれの場合にも3D表示可能なステレオ画像を出力可能とした装置、方法を提供する。
【解決手段】異なる視点から撮影された左眼画像と右眼画像を入力画像として入力する画像入力部と、入力画像の撮影時のカメラの角度に応じた制御信号を出力する撮影角度判定部と、制御信号が、2眼カメラの横持ち撮影による横持ち撮影画像であることを示す場合、前記入力画像である左眼画像と右眼画像を出力し、記制御信号が、2眼カメラの縦持ち撮影による縦持ち撮影画像であることを示す場合、左眼画像または右眼画像のいずれか一方の画像をステレオ画像生成処理部に入力し、ステレオ画像生成処理部において1枚の画像に基づく2D3D変換処理によって生成した左眼画像と右眼画像を出力する。
(もっと読む)
電子機器及び三次元モデル生成支援方法
【課題】 三次元モデル生成のための画像を容易に取得できる電子機器及び三次元モデル作成支援方法を提供すること。
【解決手段】 実施形態によれば、電子機器は、三次元モデル生成手段、撮影位置推定手段及び通知制御手段を具備する。三次元モデル生成手段は、三次元モデルを生成する対象の物体を撮影した複数の画像を用いて、三次元モデルデータを生成する。撮影位置推定手段は、前記複数の画像の内の最後に撮影された画像の撮影位置を推定する。通知制御手段は、前記生成された三次元モデルデータと前記推定された撮影位置とに基づいて、ユーザに、前記物体を次に撮影する位置を通知する。前記三次元モデル生成手段は、前記物体を新たに撮影した画像をさらに用いて、前記三次元モデルデータを更新する。
(もっと読む)
物体判別方法
【課題】判別基準を判別対象ごとに個別に考える必要がなく、またカメラの設置位置や設置角度に対する自由度の大きい物体判別方法を提供する。
【解決手段】ステレオカメラで撮影して得た画像から判別対象物の視差画像を生成し、判別対象物の視差画像の各地点における面の勾配を求め、該面の勾配の連なり状況から、視差画像における面の折れ目の位置とその折れ目の方向をその判別対象物の特徴情報として抽出し、抽出した特徴情報に基づいて、判別対象物の種類を判別する。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】焦点の異なる複数の画像から鮮明画像を生成する。
【解決手段】画像処理装置1は、所定の画素について、第1の画像データ11における当該画素を含む所定領域の画素値と、第2の画像データ12における当該画素を含む所定領域の画素値との差分に基づいて、当該所定の画素のぼけ量を算出し、ぼけ量が大きい場合は大きく、ぼけ量が小さい場合は小さいマスクサイズを決定するマスクサイズ決定手段22と、当該画素を含み、マスクサイズ決定手段22で決定されたマスクサイズの領域において、第1の画像データ11および第2の画像データ12のうち、ぼけ画像データ14の画素値とより乖離した画素値を有する画像データを特定し、特定された画像データの当該画素の画素値を、鮮明画像データ15の当該画素の画素値として、鮮明画像データ15を生成する鮮明画像生成手段24を備える。
(もっと読む)
画像処理方法及び装置
【課題】
シンプルな構成で空間分解能を向上させることができ、低コストで汎用性を備えたイメージング手法を提供する。
【解決手段】
対象の位置を固定して、対象の 画像をベース画像として取得するステップと、対象あるいは/および画像取得装置の測定系を移動させることで、前記ベース画像に対して結像面内で所定量シフトしたN枚のシフト画像(N≧1)を取得するステップと、前記ベース画像と各シフト画像の同じ座標の画素同士の差分からN枚の差分画像(N≧1)を取得するステップと、前記N枚の差分画像を加算して対象の差分積算画像を取得するステップと、からなる。
(もっと読む)
車両周辺撮影装置および車両周辺画像の処理方法
【課題】高精度に車両周辺の障害物を検出することができる車両周辺撮影技術を提供する。
【解決手段】車両の周辺の情景を撮影する第1カメラと、第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラと、が車両に搭載されている。第1カメラと第2カメラとの一方を主カメラとするとともに他方を副カメラとし、主カメラにより撮影された画像を主撮影画像とするとともに副カメラにより撮影された画像を副撮影画像とする。視点変換部13は、副撮影画像を主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成する。画像差分部14は、比較情報として主撮影画像と視点変換画像との差分画像を生成する。
(もっと読む)
情報処理装置及び情報処理方法
【課題】高感度画像からノイズ成分をより効率的かつ効果的に除去することが可能な、新規かつ改良された情報処理装置及び情報処理方法を提供する。
【解決手段】上記課題を解決するために、本発明のある観点によれば、フラッシュ発光を伴う撮像により生成された低感度画像と、フラッシュ発光を伴わない撮像により生成された高感度画像と、を取得する撮像画像取得部と、低感度画像の画素値と高感度画像の画素値との差分値である画素差分値を画素毎に示す差分画像を生成する差分画像生成部と、差分画像に基づいて、高感度画像内のノイズ成分を画素毎に示すノイズ画像を生成するノイズ画像生成部と、高感度画像及びノイズ画像に基づいて、高感度画像からノイズ成分を除去するノイズ除去部と、を備えることを特徴とする、情報処理装置が提供される。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】視差画像をより高い精度で補正できる画像処理装置、画像処理方法および画像処理プログラムを提供する。
【解決手段】画像処理装置は、被写体を異なる視点で撮像することで取得された少なくとも2つの入力画像から視差画像を生成するための視差画像生成手段と、視差画像生成手段によって生成された視差画像に含まれる画素についての信頼度を算出するための信頼度算出手段と、視差画像生成手段によって生成された視差画像を補正して出力するための視差画像補正手段とを含む。視差画像補正手段は、視差画像生成手段によって生成された視差画像に含まれる被補正画素の周辺にある画素の信頼度および色情報に基づいて、当該被補正画素についての補正画素候補としての適性を算出するための適性算出手段と、算出された適性に基づいて、当該被補正画素の補正に用いる画素を決定するための決定手段とを含む。
(もっと読む)
1 - 20 / 2,719
[ Back to top ]