
Fターム[5B057DC33]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 照合 (10,006) | 2つの画像の対比、サブトラクション (5,793) | 辞書画像との対比 (3,074)
Fターム[5B057DC33]の下位に属するFターム
相関値を用いるもの (750)
Fターム[5B057DC33]に分類される特許
21 - 40 / 2,324
車両情報登録方法、車両情報登録装置、及び車両情報登録プログラム
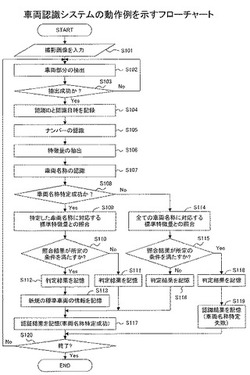
【課題】車両のモデルチェンジに伴う照合情報の登録に係るシステム管理者等の負担を軽減する。
【解決手段】車両を撮像する撮像部から画像を取得し、前記画像から、車両名称を表すマークの形状に係る特徴量である車両名称特徴量と、車両の形状に係る特徴量である車両特徴量と、を抽出し、車両名称、車両名称特徴量、車両特徴量を含む標準車両情報を車両毎に記憶する記憶部から、前記画像から抽出された車両名称特徴量に対応する車両特徴量を前記記憶部から取得し、前記記憶部から取得された車両特徴量と前記画像から抽出された車両特徴量とを照合し、所定の条件を満たす場合に、前記記憶部から取得された車両名称と前記画像から抽出された車両特徴量とに基づいて、新規の標準車両情報を前記記憶部に記憶する、処理をコンピュータが実行する。
(もっと読む)
情報処理装置

【課題】撮像された対象物に対応する商品の確定を簡便化して、より効率的に行うことが可能な情報処理装置及びプログラムを提供する。
【解決手段】実施形態の情報処理装置は、取込手段と、報知手段とを備える。取込手段は、撮像手段が撮像した画像を取り込む。報知手段は、前記撮像手段で撮像された物体の画像と、各商品の基準画像とがどの程度類似しているかを示す類似度が、前記撮像された商品を前記基準画像に対応する商品のうち一の商品として確定する条件を満たした場合に、前記撮像された商品が前記条件を満たした前記基準画像に対応する商品として確定されたことを報知する。
(もっと読む)
キャリブレーションシステム、パラメータ取得装置、標識体、及び、パラメータ取得方法
【課題】設置パラメータを取得する精度を向上する。
【解決手段】キャリブレーションシステム10においては、第1標識体31〜34が、カメラ5で取得された画像中において略真円の像として表れる略楕円のマークMi,Meを含んでいる。車載装置2は、このようなマークMi,Meの略真円の像を含む画像をディスプレイに表示させ、ユーザはこの略真円の像の位置を指定する。そして、車載装置2は、指定されたマークMi,Meの像の位置に基づいて設置パラメータを導出する。マークMi,Meの略真円の像を含む画像が表示されるため、ユーザはマークMi,Meの像の位置を正確に指定することができる。このため、設置パラメータを取得する精度を向上できる。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法
【課題】高い精度で移動体を検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】特徴点抽出部103は、撮像画像の各画素の画素値に基づいて複数の特徴点を抽出する。候補点特定部104は、抽出された特徴点から車両の所定部位の候補点を1又は複数特定する。透視投影変換部105は、特定された候補点を、透視投影変換行列を用いて3次元座標空間に逆投影する。3次元モデル配置部106は、逆投影された候補点に整合させて3次元モデルを配置する。透視投影変換部105は、配置された3次元モデルを撮像画像に投影する。移動体検出部107は、撮像画像へ投影された3次元モデルにより画定される領域内に含まれる特徴点の数に基づいて、車両を検出する。
(もっと読む)
ハーフトーン処理装置、ハーフトーン処理方法及びプログラム
【課題】出力解像度が高く、孤立ドットを正確に出力できない場合、ドットの集中により画質の安定化を図る中間調表現の処理では、メモリが増大してしまう。
【解決手段】量子化処理装置は、注目画素及び当該注目画素と副走査方向に隣り合う画素を少なくとも含む注目画素群に含まれた複数の画素の夫々に対して量子化処理する量子化処理手段と、前記量子化処理の結果から求められる量子化誤差を、前記注目画素群の近傍に位置する画素群における複数の画素に拡散する拡散手段とを備えることを特徴とする。
(もっと読む)
多重投影輝度調整方法、多重投影輝度調整装置、コンピュータプログラム及び記録媒体
【課題】非線形な応答を有していたとしても、オリジナル画像とほぼ同等になるように、複数のプロジェクタが投影したコンテンツ画像の輝度を補正する。
【解決手段】画像入力部2は、カメラ20から画像データを取得する。画像変動検出部3は、その画像入力部2から画像を取得し、その画像情報を用いて輝度変動を検出する。モード判定部4は、全てのプロジェクタを制御するための同期信号を送出し、輝度調整部5−1〜5−N、または輝度分配部6−1〜6−Nへの処理を指示する。輝度調整部5−1〜5−Nは、その画像変動検出部3にて得た輝度変動に応じてプロジェクタ10−1〜10−Nから出力する輝度を調整し、多重投影輝度補正に用いるための分配係数を算出する。輝度分配部6−1〜6−Nは、分配係数を用いて各プロジェクタの輝度を補正する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】オートアイリスによる背景画像からの現画像の輝度変化量を基に作成した輝度補正値に基づいて現画像を輝度毎に補正するときに、背景領域に侵入した異物に起因する適正でない輝度補正値を除去する。
【解決手段】画像処理装置は、まず背景画像の各輝度について、現画像との輝度差分値の度数を算出する(図3A)。次に背景画像の各輝度の画素数と各輝度の現画像との差分値の合計を用いて背景画像の各輝度の現画像との輝度差分の平均値を算出し、この平均値を基に、仮の補正テーブルを作成する(図3B)。次に近似関数及び係数を設定し、関数に仮の補正テーブルの輝度値及び輝度補正値を代入し、係数を未知数とした方程式を解いて係数を求める。求めた係数と近似関数を用いて、補正テーブルを作成する(図3C)。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】画像認識処理における認識対象を決定するための地物の認識率を、当該地物の撮影時の自車両の速度を考慮して決定することが可能な技術を実現する。
【解決手段】道路情報RDを取得する道路情報取得部23bと、地物が配置された道路区間である地物配置区間に推定自車位置EPが進入する前に、少なくとも道路情報RDに基づいて、地物配置区間内での自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定部27と、地物情報FTと予測速度推移とに基づいて、地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定部26と、画像認識処理において認識対象とする地物を認識率に基づき決定する認識対象決定部25と、を備える。
(もっと読む)
被写体追尾装置およびカメラ
【課題】被写体を正確に追尾できること。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
(もっと読む)
画像向き判定装置、画像向き判定方法、及びプログラム、並びに記録媒体
【課題】ユーザーの意図する向きで画像を表示する。
【解決手段】顔画像領域検出回路は、取り込んだデジタルの画像データから顔画像領域を検出する。画像向き判定手段30は、登録画像判定部35、目つぶり判定部36、年齢判定部37、表情判定部38、顔画像サイズ判定部39、及び顔画像向き判定部40を備え、検出した顔画像が事前に登録されているか、目つぶりの顔画像でないか、顔画像の年齢が月齢六ヶ月以上か、及び怒り顔の顔画像かの条件のうちの少なくともいずれか1つの条件と、顔画像のサイズ又は向きとの条件を組み合わせて画像データの向きを判定する。
(もっと読む)
画像処理装置および制御プログラム
【課題】多重露光撮影において、被写体の移動速度が遅い場合、あるいは撮影間隔が短い場合に、被写体同士が重なり合って煩雑な絵柄となり、被写体の輪郭も不明確となることがあった。この場合、観察者は、主要被写体を認識しづらく、視線が定まらずに不愉快な思いをすることもあった。
【解決手段】上記課題を解決するために、画像処理装置は、画像データを複数枚取得する取得部と、複数枚の画像データから、予め定められた条件に基づいて自動的に1枚の選択画像データを選択する選択部と、選択画像データと他の画像データの透明度を異ならせて1枚の合成画像データを生成する生成部とを備える。
(もっと読む)
画像比較装置および画像比較プログラム
【課題】画像比較検査を容易且つ正確に実施することのできる画像比較装置および画像比較プログラムを提供する。
【解決手段】画像比較装置10は、基準となる画像と検査対象となる画像とを略同一の解像度で読み取ることにより、第1の画像データと第2の画像データとを生成する画像読取手段11,16と、第1の画像データおよび第2の画像データを画面上であおり表示する画像表示手段11,12と、第1の画像データと第2の画像データとを比較することで両画像データ間での差異を検出し、差異が所定の閾値を超えた場合に当該差異の存在する領域に相違点があると判断してあおり表示されている画像データ上にマーキング表示を行う相違点抽出手段11と、を備えており、画像データ上に表示されるマーキングが、ポインティングデバイス15の操作によって追加・削除自在に構成されている。
(もっと読む)
医用画像処理装置および方法ならびにプログラム
【課題】左心室が表された3次元の画像データから左心室の心内膜を精度良く検出する。
【解決手段】左心室が表された3次元の画像データから左心室の心内膜を抽出する医用画像処理装置であって、血液領域抽出手段20が、画像データVから左心室内の血液領域を抽出し、凸凹点特定手段30が、抽出された血液領域の輪郭上の複数のサンプル点から凸包を求めることにより、凸包を形成する凸点およびその凸点以外のサンプル点である凹点を特定し、心内膜決定手段40が、凹点の少なくとも一部をその凹点周辺に位置する複数の凸点との位置関係に基づいて定められる量だけ血液領域の外側へ移動させることによって変形された血液領域の変形後の輪郭を前記心内膜として決定する。
(もっと読む)
位置検出装置、描画装置、および、位置検出方法
【課題】基板の面内領域から取得できる情報を用いて、基板の位置を迅速かつ確実に検出できる技術を提供する。
【解決手段】位置検出装置は、基板9を載置するステージ11と、ステージ11に載置された基板9の面内領域を撮像する撮像部と、撮像部が取得した撮像データに基づいて基板9の位置を特定する位置特定部と、を備える。位置特定部は、撮像データを解析して、基板の表面に形成されたスクライブラインのうち最外周に配置されている最外周スクライブライン910を検出し、最外周スクライブライン910の検出位置に基づいて、レイアウト領域93の中央に配置されている中央チップ領域920の位置を特定する。そして、中央チップ領域920の位置に基づいて、基板中心90の位置を特定する。
(もっと読む)
画像表示装置及び画像表示プログラム
【課題】画像の表示が単調になることを従来よりも防止できる画像表示装置及び画像表示プログラムを提供する。
【解決手段】画像表示装置100は、画像情報記憶部108から第一画像情報を取得する情報取得部109を備える。また画像表示装置100は、第一画像情報と異なる第二画像情報を出力する画像出力部OTから、当該出力された第二画像情報を入力する情報入力部103を備える。また画像表示装置100は、情報入力部103が入力した第二画像情報で表される画像の表示が開始される表示開始タイミングを決定する決定部107と、情報取得部109で取得された第一画像情報で表される画像を順次表示するタイミングの前及び後の少なくとも一方である、決定部107で決定された表示開始タイミングになると、情報入力部103で入力された第二画像情報で表される画像を表示する表示部110と、を備える。
(もっと読む)
画像検査装置
【課題】 印刷途上において、簡便に欠陥分類の調整を行うことが可能な画像検査装置を提供する。
【解決手段】 画像像検査装置100は、印刷用紙5の第1面51に形成された印刷画像の検査を行う第1面検査処理部70と、印刷用紙5の第2面52に形成された印刷画像の検査を行う第2面検査処理部80と、印刷結果情報等を保存する記憶手段90と、オペレータによる入力部62からの選択操作を受け付けて、第1面撮影画像、第2面撮影画像、第1面検査処理部70および第2面検査処理部80の検査結果等のうち選択された内容を所定の表示態様で表示部61に表示する表示制御部92を備える。
(もっと読む)
箱体の品質検査装置
【課題】箱体の姿勢にかかわらず接合部の精度を正確に検査でき、箱体の形状精度や印刷品質、異物の有無も同時に検査することができ、検査スペースの効率化を図ることができる品質検査装置を提供する。
【解決手段】接合部を挟んで隣り合う2つの領域を撮像する撮像手段3と、照明手段4と、基準形状データ記憶部、及び基準画像データ記憶部を有する記憶手段50と、撮像される画像に基づき形状データを検出し、各領域の基準形状データと対比することにより各領域のずれ量を算出し、各領域の形状精度の良否を判定する形状精度判定手段と、形状精度判定手段により算出される各領域のずれ量に基づき、当該箱体の接合精度の良否を判定する手段と、撮像手段により撮像される画像に基づき各領域の画像データと基準画像データ記憶部に記憶された各領域の基準画像データとを対比することにより各領域の印刷品質の良否及び異物の有無を判定する手段とを備えた。
(もっと読む)
三次元位置・姿勢認識装置、産業用ロボット、三次元位置・姿勢認識方法、プログラム、記録媒体
【課題】ステレオマッチング処理において互いに異なる部品91a〜91c間で対応付けが行われるといった誤対応の発生を抑制する。
【解決手段】認識対象部品91aを含む複数の部品91a〜91cを異なる視点から撮像した複数の撮像画像I1、I2それぞれから、認識対象部品91aが写る対象領域R1、R2が抽出される。複数の撮像画像I1、I2それぞれの対象領域R1、R2に対して、ステレオマッチング処理が実行される。つまり、ステレオマッチング処理を行う領域R1、R2を、撮像画像I1、I2のうちの認識対象部品91aを含む対象領域R1に限定する。そのため、対象領域R1から認識対象部品91a以外の部品91b、91cを外してステレオマッチング処理を実行することができ、その結果、ステレオマッチング処理において互いに異なる物体間で対応付けが行われるといった誤対応の発生を抑制できる。
(もっと読む)
画像処理装置および方法ならびにプログラム
【課題】画像データから抽出した候補点を形状モデルのノードに的確に対応づけする。
【解決手段】画像データDVから複数の候補点Spが抽出し、その中から、形状モデルMrefを構成する教師ラベルTqに対応する対応点を選択する。この対応点の選択は、「互いに接続される2つの前記教師ラベル毎に、該2つの教師ラベルの各々に対応づけられた2つの前記候補点間の経路を決定したときに、教師ラベルに対応づけられていない候補点の各々が、前記決定された全ての経路のうちいずれか1つの経路にのみふくまれるか、または前記決定されたいずれの経路にも含まれないこと」という制約条件の下で行う。そして、選択された複数の対応点を用いて画像データDVから構造物Mを検出する。
(もっと読む)
画像処理システム、画像処理方法、サーバおよびプログラム
【課題】画像や人物の雰囲気を壊すことなくプライバシー保護のための目隠し処理を自動で行うことが可能な画像処理システム等を提供する。
【解決手段】目隠しデザイン設定情報30は、画像データ中の人物の属性情報31、感性情報33ごとに、目隠しデザイン情報35が対応づけられたものである。属性情報31としては、例えば画像データ中の人物の性別(Male、Female)などの情報であり、感性情報33としては、例えば笑顔判定による笑顔情報である。笑顔情報とは、後述する画像データ中の顔情報より得られる情報であり、当該顔が笑顔であるか否かを判定し、その確度による情報である。目隠しデザイン設定情報30は、これらのそれぞれの組み合わせ毎に、その属性情報31および感性情報33に適した目隠しデザイン情報35が対応づけられる。
(もっと読む)
21 - 40 / 2,324
[ Back to top ]