
Fターム[5B057DC33]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 照合 (10,006) | 2つの画像の対比、サブトラクション (5,793) | 辞書画像との対比 (3,074)
Fターム[5B057DC33]の下位に属するFターム
相関値を用いるもの (750)
Fターム[5B057DC33]に分類される特許
81 - 100 / 2,324
ロボット制御システム、ロボットシステム及びマーカー処理方法
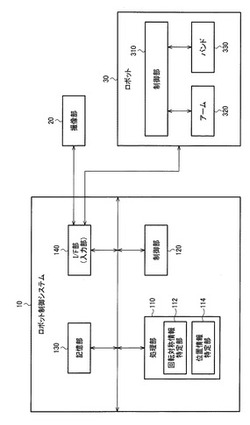
【課題】 ロボットの操作対象物に設定された第1のマーカーに基づいて、操作対象物の位置情報を特定できるロボット制御システム等の提供。
【解決手段】 ロボット制御システム10は、撮像部20から得られる画像情報に基づいて画像処理を行う処理部110と、処理部110の処理結果に基づいてロボット30の制御を行う制御部120と、を含む。処理部110は、ロボット30の操作対象物に設定された第1のマーカーに設定された画像構成要素が、N回対称性を有する場合に、画像情報に基づいて、第1のマーカーの認識処理を行い、操作対象物のN個の候補位置情報を求め、操作対象物の認識処理の結果に基づいて、N個の候補位置情報の中から操作対象物の位置情報を特定する。制御部120は、操作対象物の位置情報に応じてロボット30を制御する。
(もっと読む)
提供商品確認装置、プログラム、および提供商品確認方法

【課題】顧客から注文を受けた商品を間違えることなく提供する。
【解決手段】実施形態の提供商品確認装置は、登録手段と、画像取込手段と、商品認識手段と、確認手段と、報知手段と、を備える。前記登録手段は、注文商品の売上登録を行う。前記画像取込手段は、撮像画像を取り込む。前記商品認識手段は、前記取り込んだ撮像画像に含まれる商品の画像から当該商品を認識する。前記確認手段は、前記認識された商品が、前記売上登録が行われた注文商品であるか否かを、前記認識された商品毎に確認する。前記報知手段は、前記認識された商品が前記売上登録が行われた注文商品であるか否かの確認結果を報知する。
(もっと読む)
標識認識装置及び標識認識方法
【課題】 標識認識を効率よく行うことのできる標識認識装置を提供する。
【解決手段】 車両に搭載されて標識を認識する標識認識装置1は、車両の前方を撮影して画像を取得するカメラ10と、カメラ10にて得られた画像内の標識存在認識エリアEAにおいて、標識存在認識(第1の認識レベルでの標識認識)を行う標識存在認識部31と、カメラ10にて得られた画像内の標識存在認識エリアEAとは異なる標識内容認識エリアCAにおいて、標識内容認識(第1の認識レベルより高い第2の認識レベルでの標識認識)を行う標識内容認識部33を備える。これにより、複数の認識エリアEA,CAについて、それぞれ異なる認識レベルで標識を認識するので、画像内で高い認識レベルが必要とされない部分の認識レベルを落とすことで、全体として標識認識の効率を向上できる。
(もっと読む)
画像処理装置および方法、プログラム、並びに記録媒体
【課題】より簡単な構成で、アップコンバート機能を有する高画質化処理を実現することができるようにする。
【解決手段】位相予測/鮮鋭感向上特徴量演算部は、入力画像を高画質化した画像を予測画像として出力する際の、予測画像を構成する画素を注目画素として、注目画素に対応する入力画像の画素周辺の複数の周辺画素の画素値と、帯域制限及びノイズ付加の強度、並びに、注目画素と周辺画素それぞれとの位相に応じたフィルタ係数との積和演算により、注目画素の鮮鋭感向上の特徴量である鮮鋭感向上特徴量を演算する。予測演算部は、演算により得られた鮮鋭感向上特徴量と、学習により予め求められた予測係数との積和演算で定義される予測式を演算することにより、注目画素の予測値を算出する。本技術は、例えば、アップコンバート機能を有する高画質化処理を行う画像処理装置に適用できる。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】処理時間を低減することができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、リモコン23を介して入力される指示に基づいて、計測対象物の画像上の第1の点と物体の画像上の第2の点とを指定する。CPU34cは、第1の点を基準とする第1の図形と、第2の点を基準とする第2の図形との幾何学計算を行い、幾何学計算の結果に基づいて、計測対象物の画像と物体の画像との少なくとも一方の姿勢または位置を調整する。CPU34cは、姿勢または位置が調整された後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
物体検出装置、物体検出方法、および物体検出プログラム
【課題】カメラで撮像した2次元の撮像画像を処理して、全体が単一色でなく、帯模様が形成されているパイロン等の物体について、その検出精度を向上させた物体検出装置を提供する。
【解決手段】物体検出装置1は、画像処理部13が画像入力部12に入力されたカメラ2の撮像画像を処理し、撮像されている物体を検出する。画像処理部13は、画像入力部12に入力された撮像画像について、彩度が設定した彩度閾値よりも高い高彩度領域を抽出する。そして、抽出した2つの高彩度領域を凸包する凸包領域を設定する。そして、物体領域検出処理では、凸包領域設定処理が設定した凸包領域内における2つの高彩度領域間に位置する低彩度領域がこれら2つの高彩度領域をつなぐ独立した領域であるかどうかを判定する。
(もっと読む)
画像処理装置、方法、及びプログラム
【課題】実施形態によれば、画像内のオブジェクト領域を精度良く特定することができる画像処理装置、方法、及びプログラムを提供する。
【解決手段】第1設定部は、画像において、少なくともオブジェクトの一部の位置を検出して、画像における一又は複数の画素ごとに、オブジェクトが存在する領域に含まれるかどうかを示す第1尤度を求める。第2設定部は、画像における一又は複数の画素ごとに、画素の特徴量を用いて、画素が立体物に相当する画素であるかどうかを示す第2尤度を求める。特定部は、第1尤度と第2尤度とを用いて、画像におけるオブジェクトが存在する領域を特定する。
(もっと読む)
表示制御装置および方法、プログラム、並びに記録媒体
【課題】画面に複数の視点を切り替えて表示させる場合に、できるだけ早く表示遷移を完了させるとともにユーザの操作性を向上させることができるようにする。
【解決手段】複数のカメラにより撮影された画像をそれぞれ取得し、前記取得した画像のうちの所定の画像に表示されている特定のオブジェクトを検知し、前記取得した複数の画像において、前記特定のオブジェクトが検知された前記所定の画像とは異なる別の画像で同一のオブジェクトが検知された場合、前記別の画像のオブジェクトの表示の形態を前記所定の画像のオブジェクトを基準として設定し、同一の画面に表示するように制御する。
(もっと読む)
処理装置、処理システム、処理方法、プログラム
【課題】ユーザが操作を行うことなく、装置内に保存していたデータを送信すること。
【解決手段】本発明の処理装置は、第1のデータを受信する受信部と、第2のデータを保存する記憶部と、前記記憶部に保存された第2のデータの中から、前記受信部で受信された第1のデータに関連する第2のデータを抽出する抽出部と、前記抽出部で抽出された第2のデータを、前記受信部で受信された第1のデータに関連する装置に送信する送信部と、を含む。
(もっと読む)
顧客行動追跡型映像配信システム
【課題】 店舗や公共施設などの所定の範囲内において、個々の顧客行動を分析し、その結果をデジタルサイネージの適切な映像表示に利用する技術を提供することを目的とする。
【解決手段】 顔認識情報データベースおよび検出エリア履歴データベースを備えたホストシステムと、このホストシステムに映像を視聴する人物を撮影した画像データを送信しコンテンツを受信して表示する複数のカメラ付きデジタルサイネージ端末を備える。ホストシステムは、端末から送信された画像データを顔認識情報データベースに登録し、その顧客向けのコンテンツを端末に送信して表示させる。その際、データベースに登録された情報から顧客の行動履歴を分析して最適コンテンツを選択して表示させる。カメラ付きデジタルサイネージ端末は、ホストシステムから送信されたコンテンツを表示する。
(もっと読む)
物品認識装置、物品認識システム、プログラムおよび物品認識方法
【課題】 表面に光沢がある複数の物品をステレオカメラを用いて認識する。
【解決手段】 認識対象の複数の物品からなる物品群を撮像する第1および第2カメラを備えたステレオカメラを制御するカメラ制御部と、物品群を互いに異なる方向から照明する第1ないし第3照明装置を制御する照明制御部と、第1ないし第3照明装置のうちの何れか1つを順次点灯させて、ステレオカメラによってそれぞれ撮像された一対の2次元画像からなる第1ないし第3画像対を取得する撮像処理部と、第1ないし第3画像対に含まれる少なくとも1つの2次元画像から物品をそれぞれ含む領域を抽出する抽出処理部と、領域ごとに、第1ないし第3画像対のうち第1および第2カメラ間の受光量の差が所定値以下である画像対に基づいて物品の3次元画像を生成する3次元化処理部と、3次元画像に基づいて物品を認識して位置・姿勢情報を算出する認識処理部と、を有する。
(もっと読む)
画像形成装置及び照合方法
【課題】無駄な照合処理を抑制する画像形成装置及び照合方法を提供する。
【解決手段】本発明の実施形態における画像形成装置は、画像データ記憶部と、複数の画像のパターンデータ及び前記パターンデータの回転対称情報を関連付けて記憶するパターンデータ記憶部と、前記パターンデータ記憶部から前記パターンデータ及び前記回転対称情報を読み出すアドレスを生成し、前記パターンデータ記憶部から出力された前記回転対称情報に基づき回転した前記パターンデータを選択する回転制御信号を生成する生成部と、前記パターンデータ記憶部から出力された前記パターンデータの回転データを作成し、前記回転制御信号から、照合する前記パターンデータを選択して、照合用パターンデータを出力するデータ回転処理部と、前記画像データ記憶部から出力される前記画像データと、前記照合用パターンデータを照合しその結果を出力する照合部と、を備える。
(もっと読む)
情報処理装置、情報処理装置の制御方法及びその制御プログラム、情報処理システム、情報処理方法
【課題】すべての者を警告の出力対象とし、あらかじめ登録された者を認証することができた場合に限り例外的に警告を発報しないことで、施設外に出る者を漏らさずチェックすること。
【解決手段】あらかじめ定められた第1の場所を通過した人の行動を判定する行動判定手段と、行動判定手段で判定した結果に応じて、警告情報を生成する生成手段と、人情報データベースにあらかじめ登録された人情報を用いて、あらかじめ定められた第2の場所を通過した人が警告対象か否か認証する人認証手段と、人認証手段による認証結果に応じて、生成手段が生成した警告情報の出力を規制する規制手段と、警告情報を出力する出力手段と、を備えたことを特徴とする。
(もっと読む)
画像処理装置及びX線診断装置
【課題】カテーテル手技時における関心領域の設定の自動化。
【解決手段】画像演算・記憶部10は、被検体の血管が造影されていない第1透視画像データと、被検体に投与された造影剤により血管が造影された第2透視画像データとを記憶する。画像演算・記憶部10は、第1透視画像データを画像処理して第1透視画像に含まれるカテーテル領域を特定する。画像演算・記憶部10は、第2透視画像データを画像処理して第2透視画像に含まれる血管領域を抽出する。画像演算・記憶部10は、カテーテル領域の端点の位置に基づいて血管領域に関心領域を設定する。
(もっと読む)
環境認識装置および環境認識方法
【課題】曲線を描いたり、それ自体が傾斜したりする対象物の特定効率および特定精度の向上を図る。
【解決手段】環境認識装置130は、検出領域内を分割した複数のブロック毎の輝度を取得し、ブロック毎の輝度のエッジが伸長する方向に基づくエッジ方向を導出し、エッジ方向に基づいてブロック同士を関連付け、エッジ軌跡を生成し、複数のエッジ軌跡により囲まれる領域をグループ化して対象物とし、対象物を特定物として決定する。
(もっと読む)
データ処理装置、データ処理装置の制御方法、およびプログラム
【課題】パラメータのプリフェッチ効率を上げ、処理時間を短くする。
【解決手段】複数の入力データのそれぞれに対して辞書データを参照して入力データの所定領域ごとに1または複数の照合処理を順次行い、対象物体を認識するデータ処理装置であって、照合処理で参照する辞書データを取得する取得部と、取得部により取得された辞書データを複数保持可能な保持部と、保持部により保持された1つの辞書データを参照して入力データに対して照合処理を行う演算部と、演算部による処理結果を保持する履歴保持部と、演算部が後続の照合処理で参照する辞書データを、後続の照合処理の前に予め取得部が取得して保持部に保持するプリフェッチ処理を行うか否かを、処理結果に基づいて判定するプリフェッチ判定部と、プリフェッチ処理を行うと判定された場合に当該プリフェッチ処理を行う処理部と、を備える。
(もっと読む)
錠剤検査装置及びPTP包装機
【課題】PTPシートの製造過程における錠剤の欠け等の検査に際し、検査精度の飛躍的な向上を図ることのできる錠剤検査装置及びPTP包装機を提供する。
【解決手段】錠剤検査装置21は、容器フィルムのポケット部に収容された錠剤に対し光を照射可能な照明装置22と、照明された範囲内の錠剤を撮像可能なカメラ23と、カメラ23から出力される画像信号を処理する画像処理装置24とを備える。画像処理装置24は、目標となる錠剤の輪郭に関し、重心を原点とする各角度毎の複数の各点の接線の向き情報を目標向き情報として記憶しておき、検査に際し、抽出された錠剤の輪郭に基づき重心を特定するとともに、前記各角度毎の対応する各交点の接線の向き情報を求め、当該接線の向き情報と目標向き情報とを比較する。そして、1の交点の接線の向き情報が、対応する目標向き情報に対し許容範囲を逸脱している場合に、不良候補として判定する。
(もっと読む)
画像認識装置、画像認識装置の制御方法、およびプログラム
【課題】登録データ量が少なくても高精度に認識できる画像認識装置およびその制御方法を提供する。
【解決手段】辞書データとの照合により画像から対象物体を認識する画像認識装置であって、1以上の画像を取得する取得部と、画像のそれぞれから対象物体画像を検出する検出部と、対象物体画像から1以上の局所領域を切り出す切り出し部と、1以上の局所領域のそれぞれから対象物体を認識するための特徴量を画像ごとに算出する特徴量算出部と、画像ごとに算出された特徴量同士の類似度を局所領域ごとに算出する類似度算出部と、類似度が閾値以上となる特徴量同士がある場合には一方の特徴量を対象物体に対する辞書データとして局所領域ごとに登録する登録部と、を備える。
(もっと読む)
ロボット制御システム、ロボットシステム及びプログラム
【課題】 マスク画像を設定した画像を用いてビジュアルサーボを行うことができるロボット制御システム、ロボットシステム及びプログラムの提供。
【解決手段】 ロボット制御システム10は、参照画像と撮像画像とに基づきビジュアルサーボを行う処理部110と、制御信号に基づきロボット30を制御するロボット制御部120と、参照画像とマスク画像とを記憶する記憶部130とを含む。記憶部130は、ワーク40又はロボット30のハンド330の領域にマスク画像が設定されたマスク有り参照画像を、参照画像として記憶する。処理部110は、ワーク40又はロボット30のハンド330の領域にマスク画像を設定したマスク有り撮像画像を、撮像画像に基づいて生成し、マスク有り参照画像とマスク有り撮像画像とに基づきビジュアルサーボを行い、制御信号を生成し、制御信号をロボット制御部120に出力する。
(もっと読む)
検品システムでの位置合わせ処理のためのシステム及び方法
【課題】検品対象となる印刷画像から特徴点を抽出できない場合、リファレンス画像と印刷画像の位置合わせを行うことができないため、検品することもできない。
【解決手段】特徴点が抽出できない検品対象の印刷画像に、視覚感度の低い画像パターンを印字することで位置合わせの処理を行う検品システム。
(もっと読む)
81 - 100 / 2,324
[ Back to top ]