
Fターム[5B057DC33]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 照合 (10,006) | 2つの画像の対比、サブトラクション (5,793) | 辞書画像との対比 (3,074)
Fターム[5B057DC33]の下位に属するFターム
相関値を用いるもの (750)
Fターム[5B057DC33]に分類される特許
121 - 140 / 2,324
カメラポーズ推定装置、カメラポーズ推定方法及びカメラポーズ推定プログラム
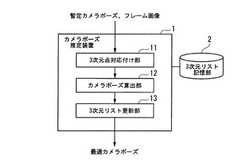
【課題】移動物体が含まれる場合においても正確にカメラポーズを算出する。
【解決手段】実空間中の点の3次元座標と、3次元座標が有するテクスチャ情報と、3次元座標が移動物体上か否かを示す移動物体フラグとを3次元点IDに関連付けた3次元リスト情報を記憶する手段と、移動物体フラグが0である3次元点の対応付けを行う3次元点対応付け手段と、最適カメラポーズ情報を出力するカメラポーズ算出手段と、最適カメラポーズ情報を用いてアウトライヤ対応点リスト情報内の3次元座標がフレーム画像に射影される再射影点を決定し、該再射影点とアウトライヤ対応点リスト情報内の対応点座標から算出する動きベクトルを用いて対象の3次元座標が移動物体上か否か判定し、移動物体と判定された場合は、処理対象のアウトライヤ対応点リスト情報内の3次元点IDに対応する移動物体フラグを1に更新して、最終的な最適カメラポーズを出力する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラムおよび撮像装置

【課題】容易に所望の構図の画像を得ることができる画像処理装置、画像処理方法、画像処理プログラムおよび撮像装置を提供する。
【解決手段】所定の構図に関する条件を示す本構図条件を満たす画像として本画像を生成する画像処理装置において、撮像部の撮像に応じて得られる撮像画像が、本構図条件に基づく予備構図条件を満たすか否かを判定する画像条件判定部と、画像条件判定部の判定に応じて予備構図条件を満たす画像である予備画像を得るための処理を実行する画像取得関連処理部と、画像取得関連処理部による処理に基づき得られる予備画像に、本構図条件に応じた画像加工を施して本画像を生成する画像加工部とを備えた画像処理装置である。
(もっと読む)
情報処理システム、情報処理装置、撮像装置、および情報処理方法
【課題】対象物の動画像から応答性よく位置情報を取得する。
【解決手段】撮像装置12は第1カメラ22、第2カメラ24を含む。各カメラはそれぞれ、既知の幅を隔てた左右の位置から同じタイミング、同じフレームレートで対象物を撮影する。そして撮影した各フレーム画像を所定の複数の解像度の画像データに変換する。情報処理装置14の入力情報取得部26は、ユーザからの指示入力を取得する。位置情報生成部28は、ステレオ画像のデータのうち低解像度、広範囲の画像で対象物の領域または動きのある領域を対象領域としておよそ見積もり、当該領域のみ高解像度の画像でステレオマッチングを行い、対象物の3次元の位置を特定する。出力情報生成部32は、対象物の位置に基づき必要な処理を行い出力情報を生成する。通信部30は、撮像装置12に対する画像データの要求および取得を行う。
(もっと読む)
色表示方法及び色表示装置
【課題】照明光や通信系に起因する色のずれを是正する。
【解決手段】色表示装置1は、第1照明体2の下でXYZ表色系カメラ3から対象物4のXYZ表色系の画像信号を入力するXYZ表色部5と、変換マトリクスを用いてRGB表色系へマトリクス変換して、RGB表色系の画像信号値を出力する高忠実色再現部6を備え、高忠実色再現部6と表示デバイス7の通信を行うインターネット回線8を備え、表示デバイス7の色標表示領域9にRGB表色系の画像信号値の色標を表示させ、色標表示領域9と間隔をおいて分光器10が配置され、分光器10から、第2照明体11の下でXYZ表色系の補正用画像信号を検出する補正用画像信号検出部12と、この補正用画像信号に基づいて、高忠実色再現部6でのマトリクス変換を補正する補正演算部13とを備える。
(もっと読む)
自位置特定システム、自位置特定プログラム及び自位置特定方法
【課題】データベースに整備されていない地物に基づいて自位置が特定されることを抑制し、データベースに整備されている地物に基づいて適切に自位置を特定する。
【解決手段】推定自位置情報を取得する推定自位置情報取得部1と、撮影画像取得部3と、地物データベース21fから、画像認識の対象となる対象地物の対象地物情報を取得する地物情報取得部4と、対象地物の画像認識を行なう画像認識部6と、画像認識結果と対象地物情報とに基づいて推定自位置情報を補正する位置情報補正部9と誤認識可能性の有無を判定する誤認識可能性判定部7と、位置情報補正部9による補正の要否を判定する補正要否判定部8とを備え、補正要否判定部8は、誤認識可能性が有ると判定された場合に、位置情報補正部9による補正が不要と判定する。
(もっと読む)
放射線画像撮影装置および方法
【課題】放射線検出器を被写体中の隣接する複数の領域に順次移動させつつ、各領域の放射線画像を撮影して長尺な放射線画像を得る放射線撮影において、被曝量を抑えつつ、各放射線画像の濃度を均一にする。
【解決手段】各領域N1,N2…の放射線撮影をする際に、各領域N1,N2…の可視光画像を撮影し、可視光画像に含まれる被写体Nの撮影部位を認識し、撮影部位の認識結果に基づいて、各放射線画像の濃度が均一となるように、放射線源の照射線量を設定して各領域N1,N2…の放射線画像を合成して被写体Nの全体を表す長尺放射線画像を生成する。
(もっと読む)
画像監視装置
【課題】 照明環境により画像情報に人物の顔の情報が不足する場合であっても当該人物が不審者であるか否か判定可能とする。
【解決手段】 監視空間において顔を隠蔽した不審者を検出する画像監視装置であって、周期的に監視空間を撮像して監視画像を取得する撮像部と、予め人物の顔特徴情報を記憶するとともに撮像部が取得する監視画像を記憶する記憶部と、監視画像から人物の頭部に相当する入力頭部領域を抽出する頭部抽出部と、入力頭部領域が顔の特徴情報を有しているか顔特徴情報を用いて判定する顔特徴判定部と、周期的に取得される複数の監視画像間において対応する入力頭部領域を追跡する追跡部と、顔特徴判定部にて入力頭部領域に顔の特徴情報無しと判定された場合、追跡部にて対応付けされた過去の入力頭部領域を用いて、顔を隠蔽した不審者であるか否かを判定する不審者検出部と、を備える。
(もっと読む)
物品検出装置および静止人物検出装置
【課題】持ち込み物品を効果的に検出する。
【解決手段】物品検出装置は、監視領域を撮影した監視画像を順次取得する撮像部20と、監視領域の背景が撮影された背景画像と人物の外形を模した人物モデルを記憶する記憶部21と、静止している物品を検出する制御部22と、を具備する。制御部22は、監視画像と背景画像から変化領域を抽出する変化領域抽出手段220と、変化領域に前記人物モデルを重ね当該変化領域の内側でかつ当該人物モデルの外側である物品領域の特徴を記憶部21に記憶する物品領域抽出手段222と、順次取得された画像にて変化領域を時間的に追跡し変化領域が静止しているかを判定し静止物体領域を検出する静止物体領域検出手段223と、静止物体領域が検出されると、静止物体領域が前記物品領域の特徴を有するかを判定し物品領域の特徴を有する場合に当該静止物体領域が物品であると判定する異常判定手段224とを有する。
(もっと読む)
画像監視装置
【課題】 頭部領域の数を用いて複数人で現れる強盗などの不審者を検出する場合に、肩部など誤検出要因の影響を低減した画像監視装置を提供する。
【解決手段】 監視空間における非常事態を検出する画像監視装置であって、周期的に前記監視空間を撮像して監視画像を取得する撮像部と、前記監視画像から人物の頭部に相当する入力頭部領域を抽出する頭部抽出部と、前記入力頭部領域の数に基づき前記監視空間内の人数を検出する人数検出部と、前記検出した人数が所定人数以上であれば非常事態と判定する非常判定部と、を備え、前記人数検出部は、前記頭部抽出部にて抽出された入力頭部領域について所定距離以内に他の入力頭部領域が存在する場合、何れか一方の領域をカウントフラグ無効とし、当該カウントフラグが無効に設定されていない入力頭部領域に基づき前記監視空間内の人数を検出する。
(もっと読む)
3次元的モデルを利用した身体臓器の映像生成方法及び装置並びにコンピュータ読み取り可能な記録媒体
【課題】リアルタイムで医療映像を入力してこれを3次元モデルと整合した映像と比較し、リアルタイム医療映像に3次元モデルが結合された映像を出力する3次元的モデルを利用した身体臓器の映像生成方法及び装置を提供する。
【解決手段】本発明による臓器映像の生成方法は、患者の少なくとも一つの臓器を表す医療映像に基づいて少なくとも一つの臓器の3次元モデルを生成し、患者の身体活動による少なくとも一つの臓器の形態的変化を表す複数の映像と臓器の3次元モデルとを整合させることで複数の整合映像を生成し、患者の現在身体状態に基づいて複数の整合映像のうちのいずれか一つを選択して出力する。
(もっと読む)
画像監視装置
【課題】侵入検知の性能を維持しながら所定物品の設置を許容することにより、正規利用者の利便性を向上可能な画像監視装置を提供する。
【解決手段】変化領域抽出部231は、撮像部21により監視空間が順次撮像された監視画像と記憶部22に記憶された背景画像221とを比較して変化領域を抽出し、物体領域検出部232は変化領域の外形を所定図形にて近似して物体領域を検出する。物体領域追跡部233は前後する時刻に検出された物体領域のうち特徴が互いに類似する物体領域を対応付け、対応付けた物体領域ごと検出位置から移動距離を算出する。遮蔽異常判定部235は物体領域の移動距離を予め設定された静止判定値と比較するとともに当該物体領域に占める変化領域の割合を算出して予め設定された遮蔽容認値と比較し、移動距離が静止判定値未満且つ割合が遮蔽容認値以上であるときに侵入者の検知を妨げる遮蔽物があると判定する。
(もっと読む)
情報処理装置および情報処理方法、記録媒体、並びにプログラム
【課題】対象を迅速に追跡できるようにする。
【解決手段】物体認識部は、画像から認識物体を認識する。予測部は、認識物体の次の位置および形状を予測する。そして、物体認識部は、予測部により予測された位置に対応する画像の領域内から予測された形状の認識物体を認識する。本開示は、例えば情報処理装置に適用できる。
(もっと読む)
ネットワークシステム、登録方法、およびコントローラ
【課題】訪問者の画像をより有効に利用することができるネットワークシステムを提供する。
【解決手段】訪問者を撮影するためのカメラと、コントローラ100とを備えるネットワークシステムが提供される。コントローラ100は、メモリ101と、カメラから訪問者の画像を受信するための通信インターフェイス105と、登録者を識別するための識別情報を取得して、識別情報と訪問者の画像から得られる特徴情報とを対応付けてメモリ101に記憶するためのプロセッサ110とを含む。
(もっと読む)
画像処理方法及び画像処理装置
【課題】種々の形状のマークの識別を可能とする。
【解決手段】電子部品Cを基板Kに実装する際に、電子部品又は基板に付されたマークMを撮像した撮像画像データによるマークの識別に用いられる画像処理方法であって、マークの撮像画像データから当該マークの中心位置を特定する中心特定工程と、マークの中心位置からマークの撮像画像データの極座標変換データを取得するデータ変換工程と、極座標変換データにおける背景とマークとの境界線の形状的特徴からマークの形状を判別する形状判別工程と備えている。
(もっと読む)
画像処理装置、画像処理プログラムおよび画像処理方法
【課題】位置合わせを正確に行うことができる画像処理装置を提供する。
【解決手段】画像間の位置合わせを行う画像処理装置であって、位置合わせ基準となる基準画像を決定する基準画像選択部2と、基準画像と、基準画像の画素値又は輝度値に基づいて鏡面ハイライト領域を検出すると共に、基準画像と位置合わせを行う参照画像の画素値又は輝度値に基づいて鏡面ハイライト領域を検出する鏡面ハイライト領域検出部3と、鏡面ハイライト領域の位置情報に基づいて少なくとも鏡面ハイライト領域に重みを設定する重み設定部4と、重みを用いて、基準画像と参照画像とのマッチングを行って位置ずれ量を算出する位置ずれ量算出部5とを備え、重み設定部4は、鏡面ハイライト領域、あるいは鏡面ハイライト領域および鏡面ハイライト領域の周辺領域の重みを、鏡面ハイライト領域、あるいは鏡面ハイライト領域および周辺領域以外の領域の重みよりも小さく設定する。
(もっと読む)
コンクリート表面の閉合ひび割れ検出方法
【課題】コンクリート表面を撮像した元画像データを画像処理して閉合ひび割れを自動的に抽出する。
【解決手段】上下左右の矩形の処理領域を一般的に想定される閉合ひび割れのサイズをカバーする面積だけオーバーラップするように分割した複数の矩形の処理領域の元画像に対して画像処理を行い、撮影解像度以上のサブピクセル精度でひび割れ線分を抽出し、領域解析により一定以下の面積の微粒子を除去し、近接する線分同士を連結して閉合領域を生成する。全ての領域に対してラベル付けを行い、各領域の上下左右の端部の座標値が前記矩形の処理領域の範囲内にあるか否かを判定し、範囲内ならば閉合ひび割れと決定する。
(もっと読む)
地物選定システム、地物選定プログラム及び地物選定方法
【課題】画像認識を実施する時点における日照の状況も効果的に反映して、予め存在が把握されている複数の地物の中から画像認識の対象とする対象地物を選定する。
【解決手段】所定範囲内に存在する複数の候補地物についての地物情報である候補地物情報を取得し、日陰と日向とのコントラストを示すコントラスト情報を取得し、候補地物情報と日時情報とに基づいて、候補地物のそれぞれについて、候補地物と日陰との関係を示す情報である地物日陰情報を演算し、地物日陰情報とコントラスト情報とを含む日照要因情報に基づいて、候補地物の中から対象地物を選定する。
(もっと読む)
画像処理システム、顔情報蓄積方法、画像処理装置及びその制御方法と制御プログラム
【課題】顔情報そのものを蓄積せずに、顔のパーツ、属性情報および関連情報で顔情報の特徴を蓄積して照合し、記憶媒体や通信媒体のリソースの有効利用を図る。
【解決手段】撮影された画像から顔情報を検出して分析するための画像処理装置であって、撮像された画像から顔領域を検出する顔検出手段と、検出した前記顔領域から顔のパーツを検出するパーツ検出手段と、検出した前記パーツの領域、前記パーツの周辺領域、前記顔領域の他の部分領域の少なくとも1つの領域における、色を含む属性を分析する属性分析手段と、前記顔検出手段が検出した前記顔領域と関連付けられる関連情報を取得する関連情報取得手段と、前記パーツと、前記属性と、前記関連情報とを検索可能に関連付けて蓄積する蓄積手段と、を備えることを特徴とする。
(もっと読む)
情報処理装置、情報処理方法およびプログラム
【課題】特定対象物の識別処理を迅速に行う。
【解決手段】情報処理装置は、変換部および算出部を具備する。ここで、画像に含まれる特定対象物における特徴点とその周囲とを含む領域を第1領域とし、第1領域に含まれる1つの画素を基準画素とした場合におけるその基準画素とその周囲の画素とを含む領域を第2領域とする。変換部は、基準画素の特徴量とその基準画素に係る第2領域に含まれる他の画素の特徴量との比較結果に基づいて、他の画素の特徴量をその第2領域に含まれる画素毎に変換する。算出部は、基準画素毎に変換により求められた第2領域に含まれる各画素の値について、第2領域に含まれる各画素の位置毎に演算を行うことにより、特定対象物を識別する識別処理に用いられる特徴量を算出する。
(もっと読む)
画像処理プログラム、画像処理装置、計測解析装置及び画像処理方法
【課題】 関心領域(ROI)の設定に際し、各領域の割合が所望の値となるような関心領域(ROI)を容易に、精度良く設定する。
【解決手段】 生体の挙動を測定して解析する装置に搭載されて前記生体の測定対象領域を選定する操作を支援する画像処理装置のプログラムであって、取得した生体画像の一部に所定形状の測定対象領域を設定するために、前記所定形状と同一の形状の領域を前記選定する操作に応じて前記生体画像上を移動させるステップと、前記生体画像の各画素に対応付けられた当該生体の生体構造あるいは生物学的状態を区分する値に基づいて、前記領域に含まれる画素の前記区分の割合を算出するステップと、算出した前記区分の割合を含む情報を前記領域における指標として提示するステップとを前記画像処理装置に実行させるためのプログラムである。
(もっと読む)
121 - 140 / 2,324
[ Back to top ]