
Fターム[5B057DC33]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 照合 (10,006) | 2つの画像の対比、サブトラクション (5,793) | 辞書画像との対比 (3,074)
Fターム[5B057DC33]の下位に属するFターム
相関値を用いるもの (750)
Fターム[5B057DC33]に分類される特許
1 - 20 / 2,324
撮像装置及び方法、並びに画像生成装置及び方法、プログラム
位置姿勢計測装置、その処理方法及びプログラム
画像処理装置、画像処理方法、プログラム
画像処理装置、画像処理方法
検査システム及びレシピ設定方法
デジタルコンテンツのメタデータを生成するための方法および装置
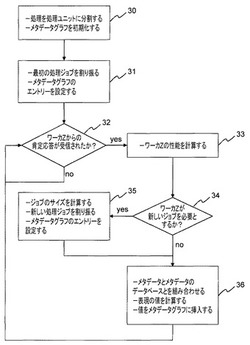
【課題】メタデータの生成が行われている最中に、すでに生成されたメタデータをレビューできるようにする、デジタルコンテンツのメタデータを生成する。
【解決手段】メタデータ生成は、複数の処理タスクに分割されて(30)、その処理タスクは、2以上の処理ノードに割り振られる(31)。2以上の処理ノードによって生成されたメタデータは、収集されて(36)、そして出力ユニット上で可視化される(36)。
(もっと読む)
車外環境認識装置および車外環境認識方法

【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
検査装置、検査方法、検査システム、コンピュータプログラム
【課題】 印刷不良であるか否かをシートごとに判定して、シートごとの判定結果に基づいて印刷装置を制御する場合、印刷不良の種類によっては、適切な制御が行えないことがある。
【解決手段】 本発明は、印刷不良の発生箇所の特徴に基づいて印刷不良の種類を判定し、判定された印刷不良の種類に応じた印刷装置の制御を行うことを特徴とする。
(もっと読む)
画像処理方法、および画像処理装置
【課題】学習データベースに格納されるデータ数が少ない場合に、より高画質な出力画像を生成する画像処理方法等を提供する。
【解決手段】学習データベースに格納された第2学習データに処理を行ったデータである第3学習データを処理ごとに複数生成する第1生成ステップ(S1003)と、複数の第3学習データの中から、入力画像の特徴データと最も類似度の高い第3学習データである選択データを選択する選択ステップ(S1004)と、選択データの生成に用いられた第2学習データと、これに対して選択データを生成するために行われた第1処理とを特定し、特定した第2学習データと対になる第1学習データに第1処理を行うことによって高周波データを生成する第2生成ステップ(S1005)と、高周波データが表す画像を入力画像に加えた出力画像を生成する第3生成ステップ(S1006)とを含む。
(もっと読む)
画像処理装置及び該画像処理装置で用いる判定閾値設定方法
【課題】ヒストグラムを目視で確認しつつ、検査対象物の良否を判定する基準である判定閾値を容易に設定することができる画像処理装置及び該画像処理装置で用いる判定閾値設定方法を提供する。
【解決手段】撮像部で撮像された検査対象物の画像と、事前に記憶してある検査対象物と比較する基準となるマスタ画像との一致度を算出する。複数の検査対象物について算出した一致度の度数分布を示すヒストグラムを表示し、撮像部で撮像された検査対象物について算出した一致度を、表示されたヒストグラムに対応付けて表示する。ヒストグラムと一致度とが同じ画面上に表示された状態で、検査対象物の良否判定に用いる閾値を設定する。
(もっと読む)
マシンビジョンシステムのパートプログラム編集環境内で編集初期化ブロックを利用するシステム及び方法
【課題】マシンビジョンシステムのパートプログラム編集環境内で編集初期化ブロックを利用するシステム及び方法を提供する。
【解決手段】パートプログラムの編集初期化ブロックを定義及び利用する方法が提供される。パートプログラムは、一部を測定するための複数のステップを備え、編集インタフェースに表示される。編集インタフェースに、編集初期化ブロックに含めるステップを選択する選択肢が提供される。パートプログラムが保存された後に、編集のためにパートプログラムが呼び出されると、追加のステップがパートプログラムに追加される前に編集初期化ブロックが実行され得る。編集初期化ブロックにない初期パートプログラムステップによって取得されたデータの少なくともいくつかは、編集初期化ブロックを実行して決定されたデータに関連する推定データに基づいてもよい(例えば、基づいて変更されてもよい)。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】運動の有効性に関するフィードバックを目に見える形でユーザに呈示することのできる仕組みを提供すること。
【解決手段】入力画像に映る人物の運動を認識する認識部と、前記認識部により認識される前記運動の有効性に応じて異なる仮想オブジェクトを前記入力画像に重畳する表示制御部と、を備える画像処理装置を提供する。前記画像処理装置は、前記認識部により認識される前記運動の有効性を示すスコアを算出するスコア算出部、をさらに備えてもよく、前記表示制御部は、前記スコア算出部により算出される前記スコアの大きさを表現する前記仮想オブジェクトを前記入力画像に重畳してもよい。
(もっと読む)
画像処理装置及び画像処理方法
【課題】入力される画像を低解像度から高解像度に解像度変換を行う場合に起こりうるジャギーやなまりを低減しかつ高解像度な出力を可能とすること。
【解決手段】低解像度から高解像度に変換する際、補間を行う注目画素の周辺の多階調の信号値パターンを取得する。取得した信号値パターンに対し予め用意するパターンファイル内から取得した信号値パターンに応じたパターンをパターンマッチングにより抽出し、信号値の置換を行い高解像度にして出力する。
(もっと読む)
端末装置、画像処理方法、及びプログラム
【課題】画像データに対する計測記録データを容易に作成することができる端末装置、画像処理方法、及びプログラムを提供する。
【解決手段】記憶部140は、画像データ内の第1座標範囲と、第1座標範囲に関する第1計測値データと、が関連付けられた第1画像データを保持する。制御部150は、第2画像データ内の第2座標範囲をユーザの指定に応じて取得する。解析部160は、第1座標範囲の画像パターンと第2座標範囲の画像パターンを比較し、比較結果及び第1計測値データに基づいて、第2座標範囲に関する第2計測値データを算出する。
(もっと読む)
検品装置、検品方法、検品システム、コンピュータプログラム
【課題】 リファレンス画像に基づき印刷した印刷物を検査する際に、印刷物を読み取った印刷画像とリファレンス画像との位置合わせを行うと、リファレンス画像によっては位置合わせの精度が低い場合があり、検査精度が低下する。
【解決手段】 リファレンス画像と印刷画像との位置合わせを行って印刷物の検査を行う処理、または、位置合わせを行わずに印刷物の検査を行う処理を、リファレンス画像の特性に基づいて選択する。
(もっと読む)
物品の3次元位置姿勢の認識装置及び認識方法
【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
三次元ポートレートの作成装置
【課題】二次元顔写真に基づいて、人物の三次元ポートレートを正確に作成する。
【解決手段】顔写真入力部10により、特定の人物の二次元顔写真Fを画像データとして取り込み、顔写真格納部20に格納する。雛形モデル格納部30内には、複数N通りのバリエーションをもった頭部の三次元立体データを雛形モデルM1〜M5として格納しておき、その特徴量を特徴量格納部80に格納しておく。雛形選択部40Bは、特徴量抽出部70が抽出した顔写真Fの特徴量に最も近い特徴量をもつ雛形モデルMjを選択する。モデル修正部90は、特徴量の差を相殺するように、選択モデルMjを修正し、マッピング処理部50が、修正された選択モデルMj′に顔写真Fをマッピングして、三次元ポートレートGとして出力する。特徴量としては、目、鼻、口などの代表点の座標値を用いる。
(もっと読む)
双方向小売システム
【課題】購入可能な少なくとも1つの小売アイテムの少なくとも1つの画像が投入された仮想映写を特徴とするユーザーとの双方向環境を表示するように構成された双方向小売システムを提供する。
【解決手段】仮想映写上に、顧客を引き付けるために、購入可能な少なくとも1つの製品の少なくとも1つの画像を表示する工程で、該仮想映写が少なくとも1つの製品の少なくとも1つの画像を表示するための1つ以上の表示部を含む。仮想映写上で顧客とのショッピングセッションを開始する工程で、それにより顧客が、仮想映写に関連した1つ以上の製品にアクセスできる工程を更に含む。ショッピングセッションは二次装置に転送されて継続し、それにより少なくとも1つの製品の少なくとも1つの画像が、二次装置上でアクセスされる。該方法は、顧客が製品の画像のうちの1つ以上の特性をカスタマイズすることを許可するためにカスタマイズモードを開始する工程を含む。
(もっと読む)
固定部材検出ユニット、固定部材解体システム、固定部材解体方法、およびプログラム
【課題】解体対象を固定している固定部材の位置の検出精度を高めること。
【解決手段】解体対象を撮像した撮像画像から、前記解体対象を固定している固定部材の画像として予め決められている固定部材画像を検出する固定部材画像検出部と、前記固定部材画像検出部により検出された前記固定部材画像の位置を示す位置情報を算出する位置情報取得部と、前記解体対象を固定している複数の前記固定部材の予め決められた位置関係を示す配置パターンと前記位置情報とに基づき、前記固定部材画像検出部によって検出された前記固定部材画像が前記配置パターンに含まれる前記複数の固定部材に対応するか否かを判定する配置パターン対応確認部と、を備える。
(もっと読む)
3次元座標取得装置、カメラ姿勢推定装置、プログラム
【課題】カメラ姿勢の推定精度を向上させるとともに、処理負荷を軽減させる。
【解決手段】3次元座標取得装置100は、カメラによって撮像された立体対象物の撮像画像から当該カメラのカメラ姿勢を推定する際に用いられる前記立体対象物の3次元座標を取得する3次元座標取得装置であって、前記撮像画像から、画像平面内の特徴点を検出する特徴点検出部111と、前記カメラの焦点及び前記画像平面内の特徴点を通過する直線の方程式と、前記立体対象物の方程式とから、前記直線と前記立体対象物との交点を算出し、前記特徴点の3次元座標として取得する3次元座標取得部113とを備える。
(もっと読む)
1 - 20 / 2,324
[ Back to top ]