
Fターム[5B057DC34]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 照合 (10,006) | 2つの画像の対比、サブトラクション (5,793) | 辞書画像との対比 (3,074) | 相関値を用いるもの (750)
Fターム[5B057DC34]に分類される特許
21 - 40 / 750
画像処理方法、ステレオカメラシステム
【課題】より短い処理時間で距離情報が得られる画像処理方法を提供すること。
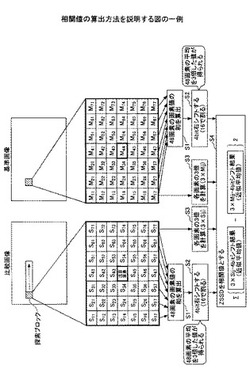
【解決手段】第1の画像と第2の画像を撮影するステップと、加算手段241が、第1の画像の第1の合計値、及び、第2の画像の第2の合計値を算出する合計値算出ステップと、シフト手段242が記第1の合計値を所定ビット数、右にシフトして第1の近似平均値を算出し、同様に第2の近似平均値を算出する近似平均値算出ステップと、整数倍手段243,244が、第1の画像と第2の画像の小領域内の各画素データの値を整数倍する整数倍ステップと、相関値算出手段249が、該画素データの値を整数倍した値から第1の近似平均値を引いた第1のデータと、画素データを整数倍した値から第2の近似平均値を引いた第2のデータをそれぞれ求め、画素データ毎に前記第1のデータと第2のデータとの差分の二乗和を算出する相関値算出ステップと、を有する画像処理方法を提供する。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法

【課題】移動体を高い精度で検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】検出ブロック設定部107は、撮像画像上で複数の画素で構成される任意の大きさの検出ブロックを複数設定する。評価値算出部109は、任意の時点tの撮像画像上で、設定した各検出ブロックが移動体の候補領域であるか否かを評価する評価値を検出ブロック毎に算出する。選択部110は、算出された評価値に基づいて、候補領域であると評価された1又は複数の検出ブロックを選択する。移動体領域検出部112は、選択した検出ブロックの撮像画像上の位置及び大きさに基づいて、撮像画像上の移動体領域を検出する。
(もっと読む)
画像処理装置、画像処理方法及び撮像装置
【課題】ずれ量算出にかかる処理時間を短縮することのできる画像処理装置を提供する。
【解決手段】異なる位置から撮影され、複数の画素が2次元の行列状に配列された右眼画像PR及び左眼画像PLが格納されるメモリ51と、N行目の各画素に対応する切り出しブロックBRを右眼画像PRから切り出し、左眼画像PLの処理領域の全水平領域から比較ブロックBLを行方向に1画素ずつ移動させて切り出すメモリ制御部53を有する。また、切り出された各比較ブロックBLと切り出しブロックBRとを比較して輝度信号の差分絶対値和を算出するSAD演算部54と、各切り出しブロックBR毎に差分絶対値和の最小値に基づいてずれ量を算出する比較器55を有する。さらに、N+1行目の画素に対するずれ量算出処理の際に、N行目において算出された差分絶対値和に基づいて比較ブロックBLの処理領域内での移動範囲を絞るように設定する演算制御部56を有する。
(もっと読む)
計測装置および情報処理装置
【課題】 三次元位置計測において、投影パターンのパターン形状を適切に設定することを目的とする。
【解決手段】 計測対象に対してパターン光を投影する投影手段と、前記パターン光が投影された前記計測対象を撮影し、前記計測対象の撮影画像を取得する撮影手段と、前記撮影画像と、前記投影手段の位置および姿勢と、前記撮影手段の位置および姿勢とに基づいて、前記計測対象の位置および/または姿勢を計測する計測手段と、前記計測対象の位置および/または姿勢の変動範囲から、前記パターン光の識別分解能を設定する設定手段と、前記識別分解能に応じて、前記パターン光のパターン形状を変更する変更手段と、を有することを特徴とする。
(もっと読む)
撮像装置
【課題】 システム構成を複雑化させることなく、撮影中の視野を全焦点画像上の適切な位置に表示させることができる撮像装置を提供する。
【解決手段】 カメラの焦点位置を変更する焦点位置変更手段と、焦点位置を変更して取得された2以上の静止画像を合成する全焦点画像生成手段と、全焦点画像、又は静止画像に基づいて抽出される画像を基準画像として当該基準画像とフレーム画像とから特徴量を抽出する特徴量抽出手段と、特徴量の比較によって、基準画像とフレーム画像間の相対位置を判定するライブ位置合わせ手段と、外部からの取込み指示を受け付けた際に、焦点位置の異なる2以上の静止画像を取得する静止画像取得手段と、取得した静止画像を合成することにより全焦点画像生成手段が生成した新たな全焦点画像と、過去に取得した全焦点画像とを連結してモザイク画像を生成するモザイク画像生成手段とを備える。
(もっと読む)
関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラム
【課題】ノイズの影響等を軽減させて、ステレオペアの相関関数を精度良く算出することができる関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラムを提供する。
【解決手段】関数算出装置110は、参照視点画像及び複数の近傍視点画像を受信する正規化部111と、参照視点画像及び近傍視点画像をステレオペア毎に平行化する正規化部111と、平行化したステレオペアの視差を正規化する正規化部111と、視差を正規化したステレオペアの参照視点画像及び近傍視点画像に、マッチングウィンドウを定めるウィンドウ設定部112と、マッチングウィンドウ間の1次元POC関数を、視差を正規化したステレオペア毎に算出する関数算出部113と、1次元POC関数のうち、相関ピークの高さが閾値以上である1次元POC関数を統合する関数統合部114と、を備える。
(もっと読む)
被写体追跡装置及びその制御方法
【課題】 基準画像と入力画像との相関度に基づく被写体追跡を行う被写体追跡装置において、被写体の見えが変化する状況における被写体追跡の精度を向上させる。
【解決手段】 入力画像中の領域のうち、登録された第1および第2の基準画像の各々と最大相関度を有する領域を求める。そして第1の基準画像についての最大相関度と第2の基準画像についての最大相関度とを比較して、特定の被写体の領域を最大相関度を有する領域の中から判定する。そして、特定の被写体の領域を判定すると、判定した特定の被写体の領域に基づいて第2の基準画像を更新する一方、第1の基準画像は、更新しない。
(もっと読む)
車載白線認識装置
【課題】 制御対象とすべき白線を適切に選択できる車載白線認識装置を提供する。
【解決手段】 複合線判定部70は、白線特徴統合部60にて出力された尤度が所定の閾値以上である白線候補それぞれに対して複数のテンプレートによるパターンマッチングを行い、また、白線候補抽出部30によるハフ変換の投票数に応じて破線のピッチを判定して、それらの結果に基づいて、様々な線種類に対して、ある白線がその線種類である確からしさを示すパラメータをまとめた確信度分布を出力し、当該白線の線種類を判別する。制御対象白線選択部80は、複合線を構成する短い破線を除いて車両に最も近い白線を制御対象の白線として選択する。
(もっと読む)
画像復号プログラムおよび画像復号方法
【課題】復号画像の画質の劣化を防止する。
【解決手段】復号部150cは、復号鍵データ140aを基にして、暗号化画像データ140bから復号画像データ140cを生成する。判定部150dは、暗号化画像データ140bの画素ブロックの組から第1の相関値を求め、復号画像データ140cの画素ブロックの組から第2の相関値を求める。そして、判定部150dは、第1の相関値と第2の相関値との関係から、復号画像データ140cに色にじみが発生しているか否かを判定し、色にじみが発生している場合には、補正部150eは、復号画像データ140cを補正する。
(もっと読む)
対象物把持装置、対象物把持装置の制御方法、およびプログラム
【課題】対象物の姿勢を推定して把持を行う処理を高速化すると共に、把持動作の失敗確率を低減する。
【解決手段】対象物の姿勢を姿勢推定パラメータに基づいて推定する推定部と、推定部により推定された対象物の姿勢に基づいて対象物を把持する把持部と、把持部による把持の失敗を検知する検知部と、検知部により把持の失敗が検知された際の対象物の姿勢に基づいて姿勢推定パラメータを修正する修正部と、を備える。
(もっと読む)
車両周辺監視装置
【課題】障害物が検出された検出領域について走査を省略することで処理負荷を削減することを目的とする。
【解決手段】車両周辺監視装置は、カメラの映像信号を入力する映像入力手段11と、入力画像についてパターンマッチング処理によって障害物を検出する走査を行う障害物検出手段12と、障害物検出手段12の走査方法を制御する走査制御手段13とを備え、走査制御手段13は、障害物検出手段12が障害物を検出した場合にその検出領域について走査を省略することを特徴とする。
(もっと読む)
歩行者認識装置
【課題】認識条件の決定精度の向上と共に、計算時間の短縮を実現することができる歩行者認識装置を提供することを課題とする。
【解決手段】本実施形態によれば、時系列の環境データに基づいて、自車両周辺の交通環境を認識し、当該認識した当該交通環境に関するデータに基づいて、歩行者認識で用いる学習済み識別器または歩行者認識用テンプレートを選択し、時系列の環境データおよび選択された学習済み識別器または歩行者認識用テンプレートに基づいて、歩行者の認識を行う。
(もっと読む)
印刷物検査方法及び印刷物検査装置
【課題】構造の異なる新たなセンサに変更した場合でも変更前のセンサ用基準データを利用して印刷物を検査する。
【解決手段】ラインセンサによって計測したデータ上に、ポイントセンサによる検査領域の計測を再現する領域を設定し、設定された領域に含まれる画素値を重み係数によって変換して検査データを生成し、当該検査データをポイントセンサ基準データと比較して印刷物検査を行う。検査に利用する重み係数は、基準媒体をラインセンサによって計測したデータとポイントセンサ基準データとが所定の類似性を満たすように、投受光される光や、投受光素子の取り付け状態を考慮して決定される。重み係数の決定と当該重み係数を用いた印刷物評価とを同じ印刷物検査装置によって行う。
(もっと読む)
画像処理装置、画像生成装置、画像処理方法、および、画像生成方法
【課題】電子透かしを画像に埋め込む際に、単純な領域分割を行うと、不正ユーザが不可視の電子透かしを除去できてしまう。
【解決手段】画像分割装置は、画像を複数の処理対象区分に区分けし、画像の特徴に基づいて、複数の処理対象区分を少なくとも、画像に潜像を埋め込むための明瞭化処理適合領域と、画像に電子透かしを埋め込むための不明瞭化処理適合領域とに分類する。
(もっと読む)
電子カメラ
【構成】複数のイメージセンサは、共通のシーンを表す画像を各々が出力しかつイメージセンサ16および56を有する。CPU26は、複数のイメージセンサのうちイメージセンサ56を含む少なくとも一部のイメージセンサから出力された画像から既定条件を満足する部分画像を探索する。CPU26はまた、イメージセンサ56から出力された画像のうち探知された部分画像に相当する部分画像に注目してイメージセンサ16の撮像条件を調整する。CPU26は、イメージセンサ56から出力された画像に対して調整処理の後に既定処理を施す。
【効果】撮像性能を高めることができる。
(もっと読む)
基準マークモデルテンプレート作成方法
【課題】回路基材の基準マークのモデルテンプレートを誤りなく作成し得る方法を得る。
【解決手段】回路基材の基準マーク形成予定位置周辺を撮像装置により撮像し、それにより得られた画像の中から基準マークの像である可能性の高い像である基準マーク候補を抽出する基準マーク候補抽出工程(S2,S8〜S11)と、抽出された基準マーク候補が複数種類予定されている基準マークのいずれであるかを判別するマーク種判別工程(S3)と、そのマーク種判別工程の実施により種類が判明した基準マークのモデルテンプレートを作成するテンプレート作成工程(S5,S7)との実行により、モデルテンプレートの作成を行う。基準マーク候補抽出工程を、ハールライク特徴を用いた階層型アダブースト検出器を利用して基準マーク候補を抽出する工程とし、マーク種判別工程をニューラルネットワークを利用してマーク種を判別する工程とする。
(もっと読む)
撮像装置、撮像方法及びプログラム
【課題】同じような表情やシーンの画像を余剰に撮影することを防止するとともに、被写体の様々な表情を簡単に撮影できるようにする。
【解決手段】顔検出部104は、撮像系102によって撮像された被写体の顔を検出し、表情検出部105は、前記検出された顔の表情に関する評価値を算出する。そして、メモリ108には過去の評価値が記憶されており、自動撮影制御部106は、前記算出された評価値が閾値よりも大きく、なおかつメモリ108に記憶された過去の評価値のうち、現在の評価値と最も近い評価値と、前記現在の評価値との差が所定値以上である場合に、撮影を指示する。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】ユーザが注目する領域に関連する画像データを、煩雑な操作を行うことなく優先的に表示させる。
【解決手段】取得部1016は、ユーザによって指定された画像データの一部の領域を特定する。順序付け部1018は、上記領域に含まれるオブジェクトと、複数の画像データに含まれるオブジェクトとに基づいて、複数の画像データの表示順序を制御する。
(もっと読む)
視差算出装置、距離算出装置及び視差算出方法
【課題】二つの視点それぞれから得られた画像間の視差を算出する際、画像間の歪み又はずれの影響を抑え、精度の高い視差を簡易に算出する視差算出装置、距離算出装置及び視差算出方法を提供する。
【解決手段】視差算出装置100は、第一カメラ1から得られた基準画像及び第二カメラ2から参照画像を取得する。画像分割部101は、条件設定部102によって設定される分割条件に従い、基準画像及び参照画像それぞれを複数の領域に分割する。補正量決定部103は、分割された領域毎に画像ずれ量を算出し、その画像ずれ量に基づき補正量を決定する。視差算出部104は、補正量決定部103によって決定された補正量に基づいて画像分割部101から得られる分割基準画像及び分割参照画像の各領域に対して画像の補正を行い、補正後の画像に基づいて視差を求める。
(もっと読む)
電子カメラ
【課題】 人物撮影時に被写体の顔を検出するとともに、被写体の顔の特徴に基づいてユーザーが要求する処理を簡単に行う。
【解決手段】 電子カメラは、被写体像を撮影する撮像素子と、メモリと、顔検出部と、顔認識部と、外部に音を出力するスピーカーと、制御部とを備える。メモリは、認識対象となる顔の特徴量を示す登録データと、認識対象の人物の出身地または使用言語に関する特性データとの対応関係を記録する。顔検出部は、撮像素子の出力に基づいて撮影画面内の顔領域を検出するとともに、該顔領域から被写体の顔の特徴量を抽出する。顔認識部は、顔領域に対応する特徴量のデータと登録データとに基づいて、顔領域が認識対象であるか否かを判定する。制御部は、顔認識部の認識結果に基づいて、特性データに応じて決定されたかけ声を撮影時にスピーカーから出力させる。
(もっと読む)
21 - 40 / 750
[ Back to top ]