
Fターム[5B057DC34]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 照合 (10,006) | 2つの画像の対比、サブトラクション (5,793) | 辞書画像との対比 (3,074) | 相関値を用いるもの (750)
Fターム[5B057DC34]に分類される特許
81 - 100 / 750
画像処理システム及び方法
【課題】高圧環境下で撮影しても、常圧環境で撮影した画像と同等の画像が得られる、画像処理システム及び方法を提供する。
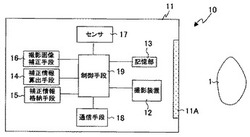
【解決手段】ビューポート11Aを有する耐圧容器11内の撮影装置12を用いビューポート11Aを経由して耐圧容器11外の撮影対象物1を撮影して生成した撮影画像を処理する。撮影装置12により形成される像が耐圧容器11外の媒質の状態及びビューポートの状態に応じて移動する量に関して、補正情報を格納する補正情報格納手段15と、耐圧容器11が高圧環境下にある状態で、撮影装置12で生成される撮影画像上の撮影対象物1における各対象点への視線ベクトルを、補正情報格納手段15に格納されている補正情報により補正して、撮影画像を処理する撮影画像補正手段16と、を備える。
(もっと読む)
画像入力装置、画像入力方法及び画像入力プログラム

【課題】特殊な光学系を用いることなく、複数の異なる位置に配置した画像センサでの撮影結果を統合することで、被写体またはカメラが動いている状況、もしくは照明環境が変動している状況下においてもマルチバンド画像の取得を可能にする。
【解決手段】被写体の基準画像を得る第1の撮像手段と、所定の分光透過率を有する光学フィルタを備え、被写体の分光情報画像を得る第2の撮像手段と、第1及び第2の撮像手段により得られた基準画像と分光情報画像との対応点を探索して、三角測量の原理に基づき、分光情報画像の視点位置を基準画像の視点位置に一致させるための画像変形パラメータを求める対応点検出手段と、画像変形パラメータに基づき、分光情報画像の変形処理を行う画像変形処理手段と、基準画像と、画像変形処理手段により画像変形を行った後の分光情報画像とをマルチバンド画像として出力する画像出力手段とを備えた。
(もっと読む)
顔表情変化度測定装置およびそのプログラム並びに番組興味度測定装置
【課題】撮影環境の変動に対しても頑健に撮影画像から顔表情の変化度を測定する技術を提供する。
【解決手段】顔表情変化度測定装置1は、被写体の撮影画像において顔領域検出手段4によって検出された顔領域からSURFを特徴点として抽出する画像特徴量抽出手段5と、被写体の標準顔から抽出されたSURFをクラスタに分類すると共に、当該被写体の入力顔から抽出されたSURFを、標準顔のSURFを分類したときの各クラスタのうち特微量に関して最も距離の近いクラスタに分類するクラスタリング手段8と、標準顔に対して分類された各クラスタと、入力顔に対して分類された各クラスタの双方について、クラスタ毎にクラスタ中のSURFの個数を頻度とするヒストグラムをそれぞれ作成するヒストグラム作成手段9と、標準顔ヒストグラム13と入力顔ヒストグラム14との差分を被写体の顔表情変化度として算出する差分算出手段11とを備える。
(もっと読む)
位置姿勢計測装置及び位置姿勢計測プログラム
【課題】初期設定でユーザに手間を掛けることなく正確にカメラポーズ及び対象の3次元形状を計測できるようにする。
【解決手段】初期値算出部11は、平面上に撮像対象が配置されている状態を、球形等の近似似撮像対象が配置されている状態であると近似し、初期カメラポーズを決定し、3次元座標を算出する。また、初期値算出部11は、初期値の候補から実際の3次元シーンの真値に近い値を選択し初期値として設定する。これにより、ユーザによる事前の作業なく、初期値として実際の3次元シーン形状に近い形状を指定できる。
(もっと読む)
電子カメラ
【構成】イメージャ16は、被写界を捉える撮像面を有して被写界像を繰り返し出力する。CPU26は、イメージャ16から出力された被写界像を1または2以上の特徴パターングループをそれぞれ代表する1または2以上の代表特徴パターンの各々と照合する。CPU26はまた、照合結果が符合条件を満足するタイミングに対応してイメージャ16から出力された被写界像に基づいて基準画像を作成し、作成された基準画像に相当する物体像の探索に用いる参照特徴パターンを1または2以上の特徴パターングループの少なくとも一部に属する複数の特徴パターンの中から選択する。
【効果】基準画像の作成に掛かる負荷および参照特徴パターンの選択に掛かる負荷が、低減される。
(もっと読む)
画像処理装置、画像処理方法、把持ロボットおよびプログラム
【課題】処理時間が短く、かつ、精度の高いテンプレートマッチング処理を簡便に実現する技術を提供する。
【解決手段】画像処理装置10は、テンプレート画像の特徴量を算出する特徴量算出部130と、前記テンプレート画像において、前記特徴量が共通する領域を共通領域として特定する共通領域特定部140と、前記テンプレート画像から夫々の前記共通領域を抽出した複数の子テンプレート画像を生成する子テンプレート画像生成部170とを備える。
(もっと読む)
画像処理装置
【課題】
動画像の各フレーム画像に対して微細なテクスチャ成分を付加した場合に発生するちらつきを抑制する画像処理装置を提供する。
【解決手段】
複数の画像からなる動画像を取得する取得部と、前記動画像中で処理の対象となる処理画像中の画素を順次注目画素として設定し、前記処理画像とは異なる参照画像中のテクスチャ成分を抽出した微細画像を記憶する記憶部と、前記注目画素の画素位置を第1の位置とし、前記微細画像中の第1の位置に対応する第2の位置を所定範囲内から探索する探索部と、前記微細画像中の前記第2の位置の画素値を前記注目画素の画素値に合成する合成部と、を有する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム
【課題】試料の観察画像の回転を精度よく検出することのできる画像処理技術を提供する。
【解決手段】本発明に係る画像処理装置は、試料の測定箇所を含む広角画像データを介して、測定画像データと基準画像データの間の回転ずれを間接的に補正する。
(もっと読む)
画像処理装置及び画像処理方法並びにプログラム
【課題】時系列に撮影した複数画像を用いて画像の合成をすること。
【解決手段】各色成分に対応する光電変換素子が所定のパターンで配置された撮像素子101から複数の画像を取得する画像取得手段(フレームメモリ)102と、複数の画像から合成画像を生成する合成処理部106とを備え、合成処理部106は、色成分に応じて決定される画像の合成比率に基づいて画像を合成することを特徴とする。また、合成処理部106は、複数枚の画像から1枚の画像を基準画像と定め、基準画像と複数枚の画像のうち基準画像以外の画像との間の画素間の相関量、或いは、複数画素からなる所定の領域間の相関量を算出する相関計算部を有し、相関量が合成対象画素の色成分に応じて決定される閾値以下である場合に、その相関量が小さくなるにつれて、基準画像以外の画像の合成比率を小さくする。
(もっと読む)
情報処理方法及びその装置
【課題】 物体の形状に応じた多数の画像からなる複数視点画像を生成する、または、三次元モデル生成や、任意視点物体認識等の画像処理を行う情報処理方法を提供する。
【解決手段】 撮像手段によって複数の視点から物体を撮像した複数の撮像画像に基づいて、複数の視点ごとに物体からの撮像手段への相対位置姿勢を算出する。算出された複数の相対位置姿勢に基づいて、撮像手段による撮像が不足している方向の撮像手段の不足位置姿勢を算出する。算出された不足位置姿勢を表示手段に表示する画像を生成する。
(もっと読む)
対応点探索装置
【課題】処理コストを増大させなくても精度良く対応点を探索し、かつ、大きな処理対象外の領域が発生することを防止する。
【解決手段】信頼度算出部50は、探索部30により探索された各対応点の探索結果を基に、各対応点の探索精度を示す信頼度を算出する。変更部60は、信頼度が所定の値よりも低い対応点を、参照画像上の別の点に変更する。決定部70は、探索部30により探索された対応点、又は変更部60により変更された対応点を基に、注目上階層の参照画像における初期探索点を決定する。探索制御部40は、決定部70により決定された初期探索点を基準として、注目階層の1つ上の階層の参照画像における探索範囲を設定し、探索範囲内において探索部30に探索処理を実行させ、当該探索処理が下位の階層から上位の階層に向けて実行されるように探索部30を制御する。
(もっと読む)
画像処理装置、画像処理方法、プログラムおよび記録媒体
【課題】検査画像から検査対象を短時間かつ高精度で検出する。
【解決手段】画像処理装置1は、輪郭画像生成部123と、輪郭マッチング実行部124と、相関マッチング実行部126とを備える。輪郭画像生成部123は、検査画像から検査対象の輪郭が抽出された輪郭画像を生成する。輪郭マッチング実行部124は、輪郭画像に第1のテンプレートを重ね合わせるためのパラメータを変化させながら第1のテンプレートを輪郭画像に照合する輪郭マッチングを実行する。その後、輪郭マッチング実行部124は、第1のテンプレートと輪郭画像との類似度が最大となるときのパラメータを求める。相関マッチング実行部126は、輪郭マッチング実行部124で求められたパラメータを用いて第2のテンプレートを検査画像に重ね合わせて相関マッチングを実行する。相関マッチング実行部126は、相関値が閾値以上である場合に検査画像に検査対象が存在すると判定する。
(もっと読む)
画像処理装置
【課題】ウィンドウ内で複数の異なる性質を有する領域の有無を判定できる画像処理装置を得る。
【解決手段】局所領域を設定する局所領域設定部2と、局所領域のコヒーレンスを算出する局所領域コヒーレンス算出部3と、局所領域を複数のサブウィンドウに分割するサブウィンドウ設定部7と、コヒーレンスの理論平均値を算出する理論平均値算出部4と、コヒーレンスの理論標準偏差を算出する理論標準偏差算出部5と、閾値を算出する閾値算出処理部6と、各サブウィンドウのコヒーレンスを算出するサブウィンドウコヒーレンス算出部8と、各サブウィンドウのコヒーレンスの平均値を算出する平均処理部9と、閾値及び前記サブウィンドウのコヒーレンスの平均値の閾値処理に基づき、局所領域が一様な領域であるのか、局所領域内に異なる性質を有する領域の境界が含まれるのかを判定する境界領域判定処理部10とを設けた。
(もっと読む)
情報処理装置、プログラム、および情報処理方法
【課題】複数の画像間での対応点探索の精度を向上させ得る技術を提供する。
【解決手段】互いに対応する画像内容を含んだ基準画像と参照画像とを取得する画像取得手段と、前記基準画像に注目点を設定する設定手段と、前記基準画像と前記参照画像とのうち少なくとも一方の画像特性を反映する選択情報に基づいて、2以上の対応点探索手法のうちの1つを選択する選択手段と、選択された1つの対応点探索手法による探索結果を用いて、前記注目点の前記参照画像上の対応点を特定する探索手段と、を備える。そして、前記選択情報は、前記2以上の対応点探索手法のうち少なくとも一部の対応点探索手法について、前記基準画像と前記参照画像とを対象とする対応点探索への利用の適性を表現した適性情報となっている。
(もっと読む)
3次元モデル生成装置およびコンピュータプログラム
【課題】地上物の表面の点群の位置の座標情報から柱状の3次元モデルを生成することができる3次元モデル生成装置を提供する。
【解決手段】3次元モデル生成装置1は、所定の3次元空間内に存在する地上物の表面の点群の位置の座標情報を取得する点群座標情報取得部111と、3次元空間内に平行な平面の対で挟まれた層状の空間を複数設定する層状空間設定部112と、層状の空間に含まれる点群を平面の一方である仮投影面に仮投影する仮投影部113と、それぞれの仮投影面に存在する共通の図形を抽出する共通図形抽出部114と、図形に特徴点を設定して各仮投影面の特徴点を結ぶ直線に垂直な実投影面を設定するとともに、点群を実投影面に垂直に投影した実投影点群を生成する実投影部115と、実投影点の分布に基づいて基準図形を生成する基準図形生成部116と、基準図形を底面とする柱状の3次元形モデルを生成する3次元モデル生成部117とを備える。
(もっと読む)
画像処理方法,画像処理装置およびそれを搭載した水中検査装置
【課題】本発明の目的は、画像情報のみを用いて、画像の振れを修正し、画像を安定化でき、水中検査装置の操作性が向上する画像処理方法,画像処理装置およびそれを搭載した水中検査装置を提供することにある。
【解決手段】本発明は、表示する時刻の取得画像と直前の時刻の取得画像の画像相関演算により算出した画像振れ量を算出し、予め設定した時間分の画像振れ量の移動平均を算出し、直前の時刻の取得画像を画像振れ量の移動平均に相当する画素分だけ移動させて補正画像を算出し、補正画像を表示することを特徴とする。
【効果】本発明によれば、画像情報のみを用いて、画像の振れを修正し、画像を安定化でき、水中検査装置の操作性が向上するものとなる。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】複数の画像を対象とした対応点の探索処理における精度の維持と速度の向上とを両立させることが可能な対応点探索技術を提供する。
【解決手段】次の処理が行われる。第1画像の第1領域が第1周波数成分情報に変換されるとともに、第2画像の第2領域が第2周波数成分情報に変換される。第1および第2周波数成分情報に基づき、第1領域と第2領域との相関を示す第1相関値が算出される。第1相関値に基づき、相関演算部での演算における周波数成分情報の使用が制限される周波数の使用制限範囲が設定される。第1画像に対応する第3画像の第3領域が第3周波数成分情報に変換されるとともに、第2画像に対応する第4画像の第4領域が第4周波数成分情報に変換される。第3および第4周波数成分情報のうちの使用制限範囲外の周波数に係る周波数成分情報に基づき、第3領域と第4領域との相関を示す第2相関値が算出される。
(もっと読む)
駐車検出装置、駐車検出方法および駐車検出プログラム
【課題】高速道路のサービスエリアなど、多数の駐車マスを持つ駐車場の各駐車マスの駐車状況を正確に検出することができる駐車検出装置、駐車検出方法および駐車検出プログラムを提供する。
【解決手段】本発明の駐車検出装置1は、複数の駐車マスを含む駐車検出対象エリアの画像を撮影する撮影手段(カメラ10)と、所定の画像処理を施す画像処理手段(エッジ抽出処理部24)と、駐車検出対象エリアの画像に所定の画像処理を施した判定対象データ(エッジ抽出処理画像データ23c)と、予め駐車マス毎に設定された判定の基準となる判定基準データ23dと、を比較して車両の有無を判定する判定手段(相関率算出部25、相関率判定処理部26)と、を備え、判定基準データは、表示パターンが撮影された駐車検出対象エリアの画像から取得した表示パターンを含む画像領域に所定の画像処理を施したデータであることを特徴とする。
(もっと読む)
多開口画像データの処理
多開口画像データを処理する方法およびシステムが記載され、この方法は、少なくとも第1の開口を使用して電磁スペクトルの少なくとも第1の部分に関連するスペクトルエネルギーに、また少なくとも第2の開口を使用して電磁スペクトルの少なくとも第2の部分に関連するスペクトルエネルギーに、撮像システム内の画像センサを同時に露出させることによって、1つまたは複数の物体に関連する画像データを取り込むステップと、電磁スペクトルの前記第1の部分に関連する第1の画像データおよび電磁スペクトルの前記第2の部分に関連する第2の画像データを生成するステップと、前記第1の画像データの少なくとも1つの領域内の第1のシャープネス情報および前記第2の画像データの少なくとも1つの領域内の第2のシャープネス情報に基づいて、前記取り込まれた画像に関連する深さ情報を生成するステップとを含む。 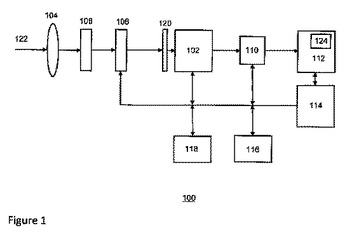 (もっと読む)
(もっと読む)
透明平板検出システム
【課題】透明平板の検出を簡易かつ高精度に行う。
【解決手段】透明平板114を含む領域を、該透明平板114の平面部法線方向に対して所定の角度から撮像して、垂直偏光画像および水平偏光画像を撮像するカメラ12と、載置台113と、載置台13の下側に設置された反射面111と、透明平板114の平面部法線に対して、カメラ12と対向するように配置され、透明平板114の平面部からの正反射光がカメラ12に入射しないように遮光する遮光板102と、垂直偏光画像および水平偏光画像に基づく縦横偏光度画像の縦横偏光度の分布に基づいて透明平板114を検出する画像処理装置13とを備える。
(もっと読む)
81 - 100 / 750
[ Back to top ]