
Fターム[5B057DC34]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 照合 (10,006) | 2つの画像の対比、サブトラクション (5,793) | 辞書画像との対比 (3,074) | 相関値を用いるもの (750)
Fターム[5B057DC34]に分類される特許
101 - 120 / 750
多開口画像データの処理
多開口画像データを処理する方法およびシステムが記載され、この方法は、少なくとも第1の開口を使用して電磁スペクトルの少なくとも第1の部分に関連するスペクトルエネルギーに、また少なくとも第2の開口を使用して電磁スペクトルの少なくとも第2の部分に関連するスペクトルエネルギーに、撮像システム内の画像センサを同時に露出させることによって、1つまたは複数の物体に関連する画像データを取り込むステップと、電磁スペクトルの前記第1の部分に関連する第1の画像データおよび電磁スペクトルの前記第2の部分に関連する第2の画像データを生成するステップと、前記第1の画像データの少なくとも1つの領域内の第1のシャープネス情報および前記第2の画像データの少なくとも1つの領域内の第2のシャープネス情報に基づいて、前記取り込まれた画像に関連する深さ情報を生成するステップとを含む。 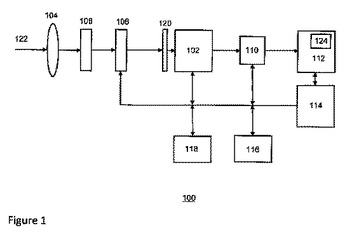 (もっと読む)
(もっと読む)
被写体認証装置、被写体認証方法及びプログラム

【課題】一時的な類似度の変動で被写体が正しく認証されなくなることを低減する。
【解決手段】顔検出部113は、画像データから第1の被写体領域を検出する。顔追跡処理部114は、被写体が認証済みの第2の被写体領域の、前記画像データより過去の画像データからの経時的な変化を追跡する。特徴情報抽出処理部115は、第1の被写体領域から被写体の第1の特徴情報を抽出する。類似度算出処理部117は、第1の特徴情報と特徴情報記憶部116に記憶される第2の特徴情報とを比較し、第1の特徴情報に対応する被写体と第2の特徴情報に対応する被写体との類似度を算出する。閾値決定部119は、第1の被写体領域に対応する第2の被写体領域が追跡されているか否かに応じて異なる閾値を設定する。認証判定部120は、算出された類似度と閾値との比較結果に応じて、第1の特徴情報に対応する被写体と第2の特徴情報に対応する被写体との一致性を認証する。
(もっと読む)
高ダイナミック・レンジ画像の発生およびレンダリング

高ダイナミック・レンジ(HDR)画像レンダリングおよび発生のための技法およびツール。HDR画像発生システムは、1組の低ダイナミック・レンジ(LDR)画像に対して動き検出を実行し、この動き検出において得られた情報に基づいて、画像に対する相対的露出レベルを導き出す。これらの相対的露出レベルは、LDR画像を統合するときに、HDR画像を形成するために用いられる。HDR画像レンダリング・システムは、HDR画像におけるサンプル値をそれぞれの低ダイナミック・レンジ値にトーン・マッピングして、局所コントラスト値を計算する。局所コントラストに基づいて残差信号が導き出され、LDR画像のサンプル値が、トーン・マップ・サンプル値および残差信号に基づいて計算される。HDR画像発生またはレンダリングの種々の段階において、ユーザー好み情報を使用することができる。 (もっと読む)
運転者監視装置、運転者監視方法及び車両
【課題】カメラの基線長を長く設定することなく、かつ、外乱の影響に妨げられずに十分な精度で運転者の顔向きを検出する運転者監視装置を提供する。
【解決手段】運転者の顔向きを監視する運転者監視装置10であって、運転者に対して近赤外光を照射する補助照明22と、複数のレンズ211a、211bと、複数のレンズ211a、211bのそれぞれに対応する撮像領域214a、214bを有する撮像素子214とを有し、運転者の顔を撮影する複眼カメラ21と、複眼カメラ21で撮影することで得られる画像を処理し、運転者の顔の特徴点の3次元位置を検出することで、運転者の顔向きを推定するECU30とを備え、複眼カメラ21は、複数のレンズ211a、211bの並ぶ方向である基線方向が鉛直方向に一致するように配置される。
(もっと読む)
画像処理装置および画像処理方法
【課題】原画像の細線においても適切にエッジ強度を検出することができる画像処理装置および画像処理方法を提供する。
【解決手段】頂点エッジ成分検出手段110は、原稿画像データ内の注目画素の4つの頂点に関して、2行×2列のエッジ検出フィルタをそれぞれ適用させる演算を行うことにより、この4つの頂点それぞれにおいてエッジ強度を検出する。画素エッジ強度検出手段120は、各頂点のエッジ強度に基づき、注目画素のエッジ強度を検出する。画素エッジ方向検出手段130は、各頂点のエッジ強度に基づき、注目画素のエッジ方向を検出する。
(もっと読む)
画像処理装置および画像処理方法
【課題】コストを増大させることなく高精度な処理を行うことができる画像処理装置を提供する。
【解決手段】エッジ方向検出手段110は、原稿画像データのエッジ方向を検出する。エッジ強度算出フィルタ選択手段120は、検出された原稿画像データのエッジ方向に基づき、NのSobel−Gaussian型エッジ強度算出フィルタから一のSobel−Gaussian型エッジ強度算出フィルタを選択する。エッジ強度算出手段130は、選択された一のSobel−Gaussian型エッジ強度算出フィルタを原稿画像データへ適用させることによりエッジ強度を算出する。
(もっと読む)
撮像装置
【課題】容易に持ち運びできる撮像装置において、対象となる被写体が、適切な大きさに配置された複数の画角の画像を自動的に得られるようにする。
【解決手段】対象となる被写体である人物を撮影する際に、画像中で検出した特定部分である顔とその大きさ及び位置に基づいて、その人物の顔が画像中で所定の大きさ及び位置となるようにレンズ部のズーム倍率及び光軸シフト部による光の入射位置のシフト量を自動的に制御し、撮影する。
(もっと読む)
画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体
【課題】 検査対象物のタイヤ内側が撮影された画像から欠陥と刻印文字とを判別することができる画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体を提供する。
【解決手段】 テンプレート領域設定工程a2では、判別対象が含まれる位置にテンプレート領域を設定する。自己相関値算出工程a3では、自己相関値を算出し、差分処理工程a4では、相関差分値を算出する。極大位置検出工程a5では、相関差分値の極大位置を検出する。偏差値算出工程a6では、極大位置の間隔を算出し、極大位置の間隔の偏差値を算出する。線状模様数算出工程a10では、画像中のブラダーグルーブの合計数を算出する。判定工程a7,a8,a11,a13では、極大位置の間隔の偏差値とブラダーグルーブの合計数とに基づいて、判別対象が刻印文字および欠陥のうちのいずれであるかの判定を行う。
(もっと読む)
オートホワイトバランス補正値算出装置、方法およびプログラムならびに撮像装置
【課題】顔検出機能を用いたオートホワイトバランス補正における誤補正を防ぐ。
【解決手段】S138では、各エリアの代表色と光源色との差分(距離)Liを算出する。S146では、各差分Liに対応する重みβiで各差分Liを重みづけして平均した差分の加重平均L’を算出する。S147では、最終WB補正値算出部52gが、差分加重平均L’に基づき、適切な補正値算出方法を選択する。これにより、カラーフェリアが発生することを防げる。
(もっと読む)
画像処理方法、画像処理装置、プログラムおよび記録媒体
【課題】 タイヤの種類、タイヤ表面の状態および照明の位置関係に依存することなく、検査の安定化および高精度化を図ることができる画像処理方法、画像処理装置、プログラムおよび記録媒体を提供する。
【解決手段】 制御部12は、タイヤ回転方向に直交する方向のラインごとに、取込画像の各画素の濃度を、各画素が含まれるライン上の平均濃度に変換して、濃度射影変換する。次に、濃度射影変換が行われた画像に対して、タイヤの回転方向のラインのうちの1つのライン上の画素について、フーリエ展開する。フーリエ展開された周波数成分からコード露出帯域の周波数成分を除いた残余の周波数成分を逆フーリエ展開し、逆フーリエ展開手段によって求めた逆フーリエ変換濃度と濃度射影変換によって求めた射影変換濃度との差分濃度を求め、差分濃度について、周期性があればコード露出と判定し、周期性がなければ刻印文字と判定して、コード露出欠陥検出処理を行う。
(もっと読む)
3次元物体認識装置及び3次元物体認識方法
【課題】高精度且つ高速に3次元物体を漏れなく認識することができる3次元物体認識装置及び3次元認識方法を提供する。
【解決手段】 認識対象である3次元物体3のモデルをあらゆる姿勢に変化させながら、カメラ画像に射影して得た各姿勢での輪郭モデルを格納した輪郭マップ14及び前記3次元物体3のモデルに含まれる文字等のテクスチャ画像における各姿勢でのテクスチャモデルを格納したテクスチャマップ15を記憶し、認識対象である3次元物体3を所定方向から撮像手段4により撮影して画像を取得し、取得した原画像に基づいて、該原画像の解像度を異なる比率で低下させたピラミッド画像を作成し、解像度が最も低い前記ピラミッド画像に対して各姿勢での輪郭モデル及びテクスチャモデルをあらゆる位置に移動させながら、前記3次元物体3の位置及び姿勢を評価する。
(もっと読む)
ラインスキャンカメラを使用してオンラインウェブを監視するシステム及び方法
様々な実施形態は、流れ方向(118)に装置に対して移動するオンライン製品ウェブを検査する装置を目的とする。装置は、視野(114)を画定し、視野が製品ウェブ(208)の部分を含むように配置されるラインスキャンカメラ(102)を含み得る。カメラ制御システム(104)は、カメラ(102)と電子通信し得、ウェブ速度センサ(110)から製品ウェブの速度を示すウェブ速度データを受信し、ウェブ速度データをライントリガ信号に変換するように構成され得る。ライントリガ信号は、流れ方向に不断の画素解像度を達成するために必要なカメラ画像キャプチャの時間周波数を示し得る。更に、カメラ制御システム(104)は、製品位置データを受信し、製品位置データを考慮するフレームトリガ信号を生成するように構成され得る。フレームトリガ信号は、画像フレームと画像フレームとの間で中断を示し得る。 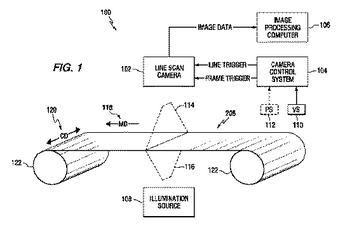 (もっと読む)
(もっと読む)
乗員姿勢推定装置
【課題】自己遮蔽が発生した場合の姿勢推定精度を簡易な構成で向上させる
【解決手段】運転席及びその周辺を繰り返し撮影し、撮影された画像データを取得する(S10)。そして、取得された画像データに含まれる運転者の人体特徴点を検出し(S50)、人体特徴点の位置の変化に基づいて、人体特徴点の位置(人体特徴点予測位置)を予測する(S60,S70)。さらに、人体特徴点予測位置に基づいて、運転者の行動を予測する(S80)。また、予測した運転者行動に基づいて自己遮蔽が発生するか否かを判断する(S100,S120)。そして、自己遮蔽が発生すると判断された場合には(S20:YES)、自己遮蔽用人体特徴点検出アルゴリズムに設定する(S40)。一方、自己遮蔽が発生しないと判断された場合に(S20:NO)、自己遮蔽の発生を考慮しない通常用人体特徴点検出アルゴリズムに設定する(S30)。
(もっと読む)
顔方向特定装置及び撮像装置
【課題】簡素な処理で顔方向の特定が可能な顔方向特定装置及び撮像装置等の提供。
【解決手段】顔方向特定装置は、少なくとも撮影者の目を撮像可能な撮像部により撮像された撮像画像を取得する画像取得部と、取得された撮像画像に基づいて、撮影者の目領域での反射光の反射光情報を検出する反射情報検出部と、検出された反射光情報に基づいて、撮影者の顔方向を特定する顔方向特定部を含む。
(もっと読む)
情報処理装置、情報処理方法、およびプログラム
【課題】保存されている数多くの画像の中から、検索条件として与えられたキー画像の被写体に関連する画像を選抜する。
【解決手段】ステップS22で、キー画像が入力され、ステップS23で、キー画像が解析される。ステップS24で、キー画像で検出された顔に対応する人物IDが特定される。ステップS25では、選抜基準が関連人物画像または類似表情画像のどちらであるか確認され、関連人物画像の場合、ステップS26およびS27で、キー画像の人物と同じグループの人物の画像群から画像リストが生成される。類似表情画像の場合、ステップS28で、キー画像の人物が類似した表情で写っている画像群から画像リストが生成される。本発明は、例えば、デジタルスチルカメラに適用できる。
(もっと読む)
3次元デジタイザ
【課題】連続性のある実画像に3次元情報を持たせ、仮想空間の任意の視点から実画像に含まれる物体を見ることが可能な画像データを生成する3次元デジタイザを提供する。
【解決手段】撮像手段2はカラー画像を撮像し、距離画像生成手段1は撮像手段2と重複する視野を持ち距離画像を生成する。撮像位置計測手段4は、撮像手段2および距離画像生成手段1による撮像位置と撮像方向とを計測する。座標変換手段3は、距離画像に規定した装置座標を位置計測手段4により計測した撮像位置および撮像方向を用いて実空間に規定されている3次元の実空間座標に変換する。座標変換手段3で得られた物体の実空間座標を用いることにより、仮想空間形成手段5では、物体のモデリングを行い仮想空間を形成する。さらに、外観形成手段6は、仮想空間に配置した物体に撮像手段で撮像した物体の外観をテクスチャとしてマッピングを行う。
(もっと読む)
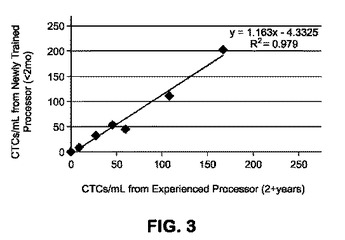
希少ではない細胞を用いて希少細胞を検出する方法
本発明は、希少ではない細胞からのデータを利用して循環性腫瘍細胞(CTC)などの希少細胞を検出する独創性に富んだ計算的な手法を提供する。本発明は、CTC検出の2つの異なる工程、すなわち、データ収集パラメータについて決定するための第1の工程およびデータの整理および解析の過程で決定を行うための第2の工程に適用可能である。さらに、本発明は、意志決定プロセスにおいて一次元および多次元のパラメータ化されたデータの両方を利用する。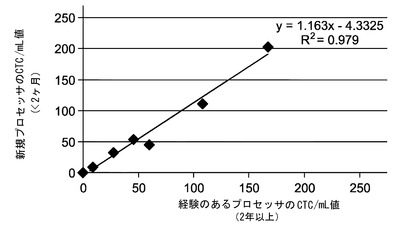
 (もっと読む)
(もっと読む)
パターン検出装置、その処理方法及びプログラム
【課題】
繰り返しパターンの周期に揺らぎを含む物体や、繰り返しパターンに無関係な外乱を含む物体の画像であっても、当該繰り返しパターンにおける個々のパターンの位置を正確に検出できるようにした技術を提供する。
【解決手段】
パターン検出装置は、繰り返しパターンを含む物体の画像を入力し、当該入力された物体における繰り返しパターンの周期を推定し、当該推定された周期で分割された画像に基づいて参照画像を生成する。そして、参照画像と、物体の画像とを比較し、比較の結果に基づいて繰り返しパターンにおける個々のパターンの位置を検出する。
(もっと読む)
画像管理装置、画像管理方法及びプログラム、ならびに撮像装置
【課題】画像のメタ情報として付加された被写体情報の修正を迅速に行う。
【解決手段】被写体情報に基づいて検索された画像の中に、被写体情報に誤りがある画像を発見した場合に(ステップS5)、ユーザはその画像の被写体情報を所定の情報に修正する(ステップS8)。被写体情報が修正されると、デジタルカメラは検索されたその他の画像の中に、被写体情報を修正した画像と類似する画像があるか否かを判定する(ステップS9)。類似する画像が存在する場合は、その画像の被写体情報をステップS8で修正した所定の情報に修正する(ステップS12)。
(もっと読む)
画像検査方法及び画像検査装置
【課題】被検査画像中に特徴量の急峻な変化がある場合でも精度よく検査できる画像検査方法及び画像検査装置を提供すること。
【解決手段】予め良品画像を複数の良品分割画像に分割して、良品分割画像ごとのマハラノビス距離を算出して基準空間を作成して、被検査画像の良否判定を行うための良否判定基準値を設定する。被検査画像を取得して(S41)、画像処理を施す(S42)。次いで、その被検査画像を、複数の被検査分割画像に分割する(S43)。次いで、個々の被検査分割画像の所定の特徴量を抽出する(S44)。次いで、各被検査分割画像のマハラノビス距離を算出して信号空間を作成する(S45)。被検査分割画像ごとに、対応する信号空間のマハラノビス距離を、同一位置にある良品分割画像における良否判定基準値と比較することによって、被検査画像の良否判定を行う(S46〜S48)。
(もっと読む)
101 - 120 / 750
[ Back to top ]