
Fターム[5B057DC36]の内容
Fターム[5B057DC36]に分類される特許
81 - 100 / 3,240
画像処理装置
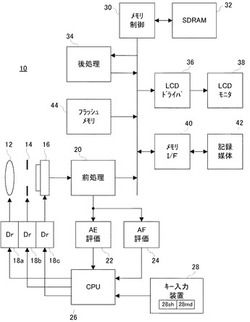
【構成】シャッタボタン28shが全押しされると、CPU26は、最適露光量,過大露光量および過小露光量に対応する3フレームの画像を取得し、2フレーム目および3フレーム目の画像データのヒストグラムを参照してシフト量SFT_SおよびゲインGN_Sを算出する。3つの露光量に対応して取得された3フレームの画像データは、算出されたシフト量SFT_SおよびゲインGN_Sを参照して縮小状態で合成される。シフト量SFT_SおよびゲインGN_Sは、合成縮小画像データのヒストグラムを参照して補正される。3つの露光量に対応して取得された3フレームの画像データは、補正後のシフト量SFT_CおよびゲインGN_Cを参照して合成される。
【効果】画像合成性能が向上する。
(もっと読む)
全焦点画像生成方法、全焦点画像生成装置、全焦点画像生成プログラム、被写体高さ情報取得方法、被写体高さ情報取得装置及び被写体高さ情報取得プログラム

【課題】焦点位置が異なる複数の撮像画像から画素位置ごとに焦点が合った画像及び高さ情報を、大域的な領域に亘って適切に焦点が合うように生成する。
【解決手段】焦点位置が異なる複数の画像を取得する(ステップS1)。各画像からグレースケール画像を取得する(ステップS5)。グレースケール画像にウェーブレット変換を施し、多重解像度画像を生成する(ステップS6〜S13)。多重解像度画像に基づいて焦点位置に関する確率分布を生成する(ステップS14)。確率分布に基づくコスト関数とペナルティ関数とを足し合わせた評価関数が最小になるような最適な焦点位置を、確率伝播法を用いて、画素位置ごとに近似的に算出する(ステップS17〜S20)。最適な焦点位置から、画素位置ごとに焦点が合った画像及び高さ情報を生成する(ステップS22)。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】画像認識処理における認識対象を決定するための地物の認識率を、当該地物の撮影時の自車両の速度を考慮して決定することが可能な技術を実現する。
【解決手段】道路情報RDを取得する道路情報取得部23bと、地物が配置された道路区間である地物配置区間に推定自車位置EPが進入する前に、少なくとも道路情報RDに基づいて、地物配置区間内での自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定部27と、地物情報FTと予測速度推移とに基づいて、地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定部26と、画像認識処理において認識対象とする地物を認識率に基づき決定する認識対象決定部25と、を備える。
(もっと読む)
多重投影輝度調整方法、多重投影輝度調整装置、コンピュータプログラム及び記録媒体
【課題】非線形な応答を有していたとしても、オリジナル画像とほぼ同等になるように、複数のプロジェクタが投影したコンテンツ画像の輝度を補正する。
【解決手段】画像入力部2は、カメラ20から画像データを取得する。画像変動検出部3は、その画像入力部2から画像を取得し、その画像情報を用いて輝度変動を検出する。モード判定部4は、全てのプロジェクタを制御するための同期信号を送出し、輝度調整部5−1〜5−N、または輝度分配部6−1〜6−Nへの処理を指示する。輝度調整部5−1〜5−Nは、その画像変動検出部3にて得た輝度変動に応じてプロジェクタ10−1〜10−Nから出力する輝度を調整し、多重投影輝度補正に用いるための分配係数を算出する。輝度分配部6−1〜6−Nは、分配係数を用いて各プロジェクタの輝度を補正する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】オートアイリスによる背景画像からの現画像の輝度変化量を基に作成した輝度補正値に基づいて現画像を輝度毎に補正するときに、背景領域に侵入した異物に起因する適正でない輝度補正値を除去する。
【解決手段】画像処理装置は、まず背景画像の各輝度について、現画像との輝度差分値の度数を算出する(図3A)。次に背景画像の各輝度の画素数と各輝度の現画像との差分値の合計を用いて背景画像の各輝度の現画像との輝度差分の平均値を算出し、この平均値を基に、仮の補正テーブルを作成する(図3B)。次に近似関数及び係数を設定し、関数に仮の補正テーブルの輝度値及び輝度補正値を代入し、係数を未知数とした方程式を解いて係数を求める。求めた係数と近似関数を用いて、補正テーブルを作成する(図3C)。
(もっと読む)
画像処理方法
【課題】予め基準となる画像データを保持する必要がなく且つ簡易に、光軸と穴の中心軸との位置ずれを補正して、パノラマ展開画像に変換することが可能な画像処理方法を提供する。
【解決手段】環状画像から内円及び外円を抽出する工程と、抽出した内円及び外円の中心をそれぞれ求める工程と、極座標変換する際に基準となる展開中心を、内円中心と外円中心との間で順次移動させながらパノラマ展開画像に変換する工程とを備える。これにより、全方位撮像装置10により穴Hの側壁面を撮像した環状画像をパノラマ展開画像に極座標変換する際に、全方位撮像装置10の光軸L1と穴Hの中心軸L2との位置ずれに起因する歪みを補正することができる。
(もっと読む)
撮像システム、撮像装置および画像処理方法
【課題】 フレームレートを落とさずにワイドダイナミックレンジの画像を得るこのできる撮像システムを提供する。
【解決手段】 撮像装置1では、通常露光モードで撮像素子3の露光時間を制御し、撮像素子3の全撮像エリアについて全画素の一部を間引いて読出しを行う間引きモードで画像の読出しを制御することにより、全撮像エリアの間引き画像を得る。そして、全撮像エリアの間引き画像から、所定の指定エリアの部分の画像を切り出した通常露光間引き部分画像を取得する。また、短露光モードで撮像素子3の露光時間を制御し、撮像素子3の全撮像エリアのうち指定エリアの読出しを行う指定読出しモードで画像の読出しを制御することにより、短露光指定読出し部分画像を取得する。そして、通常露光間引き部分画像と短露光指定読出し部分画像とを合成する。
(もっと読む)
デジタル白黒画像の不良画素の輝度補正のための方法
【課題】デジタル白黒画像の不良画素の輝度を補正する。
【解決手段】近傍にわたる不良画素輝度の計算に存在するデジタル白黒画像の不良画素の輝度補正のための方法であって、好ましくは四重結合された不良クラスタ周辺を決定するとともに、そのような周辺に属する各不良画素の輝度値を計算するために用いられる不良画素マップを生成し、各不良画素の輝度値が計算されるまでそのような手順を繰り返し実行し、不良画素輝度値が近傍画素輝度値にわたる加重平均値として計算される。
主張された方法の技術結果は、デジタル白黒画像の不良画素の輝度補正によって、取得された画像の品質を増加することにある。
(もっと読む)
3次元計測システム及び3次元計測方法
【課題】外部標定の容易なステレオ撮影による3次元計測システム及び3次元計測方法を提供する。
【解決手段】3次元計測システムは、測定対象物1を複数方向から撮影してステレオ画像20を得るステレオ撮影部11と;測定対象物の全体をカバーする基準体2の一部を構成する、複数の基準マーク4を有するサブ基準体3と;ステレオ撮影部で撮影して得たステレオ画像に基づくサブ基準体が有する複数の基準マークの3次元座標値の撮影測定値fと予め基準計測された基準測定値gとを含む、基準体の3次元数値解析モデルである基準体モデル102を3次元計算空間V中に一体として画成する基準体情報画成部12と;基準体モデルを用いてステレオ撮影部の外部標定要素を算出する標定要素算出部13と;外部標定要素により定位されたステレオ撮影部により撮影される測定対象物のステレオ画像から測定対象物の3次元計測をおこなう3次元計測部14とを備える。
(もっと読む)
画像処理装置及び画像処理方法
【課題】画像処理装置及び画像処理方法を提供する。
【解決手段】画像処理装置は、三値画像に基づいて、該三値画像の各層に対応する二値画像を生成する二値画像生成部であって、各二値画像において、二値画像が対応する層に属する画素は第1の階調を有し、他の画素は第2の階調を有する、二値画像生成部と、各二値画像において、境界に連結していない第2の階調連結領域を認識する連結領域認識部と、2つの二値画像における第2の階調連結領域の総面積の比率が第1の閾値よりも大きい、且つ2つの二値画像において第2の階調連結領域の総面積が小さい二値画像における第1の階調の領域と第2の階調連結領域の総面積が大きい二値画像における第2の階調連結領域との重なりかみ合い率が第2の閾値よりも大きい場合は、二つの二値画像における第2の階調連結領域の総面積が小さい二値画像が対応する層を文字層と決定し、もう一つの二値画像が対応する層を文字境界領域層と決定する文字層決定部と、を含む。
(もっと読む)
超解像を利用したビデオ補正
【課題】超解像を利用して行う移動オブジェクト群を含むビデオの補正の方法及び装置を提供する。
【解決手段】一連の画像から選択された画像内で、移動オブジェクトの存在部分が特定されている。関心領域内のピクセルは選択画像内で特定される。画像群と第1変換群を使用して、ピクセルの第1の部分に対して第1の値が特定される。ピクセルの第1の部分は選択画像の背景に対応する。第1変換は、画像群内の1つの画像と選択された画像との間で、背景の特徴の位置を合わせるように構成されている。画像群と第2変換群を使用して、ピクセルの第2の部分に対して第2の値が特定される。ピクセルの第2の部分は選択された画像の移動オブジェクトに対応する。第2変換は、画像群内の1つの画像と選択された画像との間で、移動オブジェクトの特徴の位置を合わせるように構成されている。
(もっと読む)
パノラマ画像作製プログラム
【課題】元の画像データにアクセス容易であって、医療分野に適したパノラマ画像作成プログラムを提供する。
【解決手段】コンピュータに、複数の内視鏡画像データを記録する内視鏡画像データ記録手段、複数の内視鏡画像データに基づき、各画素の位置に対応したインデックスデータが付されたパノラマ画像データを作成し、表示するパノラマ画像データ作成表示手段、インデックスデータに基づき、複数の内視鏡画像データのいずれかを内視鏡画像として表示させる内視鏡画像データ表示手段、として機能させるためのパノラマ画像作成プログラムとする。
(もっと読む)
画像処理装置及び画像処理方法
【課題】
高画質かつデータ量の少ない画像を生成することができる画像処理装置及び画像処理方法を提供することである。
【解決手段】
実施形態の画像処理装置は、画像データの画素値の分布に基づいて閾値を算出し、算出した閾値に基づいて各画素を2クラスに分離する分離部と、分離部によって分離された一方のクラスの画素を特定の色にした純粋化画像データを作成する純粋化部と、純粋化画像データを疑似階調法によって二値化する疑似階調二値化部と、を備える。
(もっと読む)
雑音除去装置
【課題】雑音除去フィルタとしての雑音除去処理の能力を担保しつつ、雑音除去フィルタとしてのハードウェア的な規模を縮小することが可能な雑音除去装置を提供する。
【解決手段】一定方向の走査線Lにより順次走査される複数の画素Pxにより形成されるデジタル画像における中心画素Px24の輝度と、当該中心画素Px24の周囲の複数の他の画素Pxの輝度と、を用いて、フィルタ対象領域Fにおける雑音除去処理を行う場合に、フィルタ対象領域Fにおいて走査線L上に並ぶ画素Pxの輝度を記憶し、且つフィルタ対象領域Fにおける走査線Lの数に対応した数のラインメモリを備えるとき、フィルタ対象領域Fにおける走査線L上の画素Px11乃至画素Px17の数が、走査線Lに垂直な方向の画素数より大きくされている。
(もっと読む)
画像生成装置、画像生成方法、画像生成装置用プログラム
【課題】低コストで、より少ない演算量で画像を生成する画像生成装置等を提供する。
【解決手段】複数の撮像装置20a、20bにより第1位置から撮像された第1画像30aと第2位置から撮像された第2画像30bとの入力を受け付け(S1)、第1画像および第2画像の各画素の色相を求める色相変換を行い(S3)、色相変換された第1画像および第2画像から、第1画像および第2画像の特徴点を抽出し(S6)、第1画像と第2画像とにおいて対応する特徴点を求め(S7)、対応する特徴点の間の距離を有する視差ベクトルを算出し(S8)、第1位置と第2位置との間に第3位置を設定し、第1位置および第2位置に対する第3位置の位置関係と視差ベクトルとに従い、第1画像と第2画像とから、第3位置から撮像された場合の第3画像(35a、35b、35c)を生成する(S12)。
(もっと読む)
画像処理システム、装置、方法及び医用画像診断装置
【課題】経時的な画像データを表示する際にも立体的な情報を容易に把握させることができる画像処理システム、装置、方法及び医用画像診断装置を提供すること。
【解決手段】実施形態に係る画像処理装置においては、画像選択部は、経時的に撮像された画像データから生成された複数の視差画像群のなかから基準となる基準視差画像群を選択する。画質変更部は、基準視差画像群及び複数の視差画像群に含まれる視差画像群のうち少なくとも一方の画質を変更する。
(もっと読む)
画像検査装置
【課題】 印刷途上において、簡便に欠陥分類の調整を行うことが可能な画像検査装置を提供する。
【解決手段】 画像像検査装置100は、印刷用紙5の第1面51に形成された印刷画像の検査を行う第1面検査処理部70と、印刷用紙5の第2面52に形成された印刷画像の検査を行う第2面検査処理部80と、印刷結果情報等を保存する記憶手段90と、オペレータによる入力部62からの選択操作を受け付けて、第1面撮影画像、第2面撮影画像、第1面検査処理部70および第2面検査処理部80の検査結果等のうち選択された内容を所定の表示態様で表示部61に表示する表示制御部92を備える。
(もっと読む)
画像取得装置
【課題】変動状態のスペクトルカメラにより精度の高い光スペクトル画像を取得可能な、或は光スペクトル特性付の3次元データを取得可能な画像取得装置を提供する。
【解決手段】時系列に連続するフレーム画像で構成される動画像を取得する第1カメラ14と、第1カメラと既知の関係にあり、測定対象の光スペクトル画像を複数取得する第2カメラ15と、撮像制御装置21とを具備し、撮像制御装置21は、1つのフレーム画像から複数の特徴点を抽出し、特徴点を時系列に連続するフレーム画像中に順次特定し、複数の光スペクトル画像と対応するフレーム画像について特徴点に基づきフレーム画像間の画像マッチングを行い、該画像マッチングで得られた条件に基づき複数の光スペクトル画像を合成する様構成した。
(もっと読む)
画像形成装置
【課題】ユーザーが所望するコントラストの再生画像を得ることができる画像形成装置を提供する。
【解決手段】画像データの濃度分布を検出して最小入力濃度レベルaと最大入力濃度レベルbとを特定することで、ダイナミックレンジの幅Wを算出し、算出した画像データのダイナミックレンジの幅Wとレンジ閾値Dとを比較し、画像データのダイナミックレンジの幅Wがレンジ閾値Dよりも狭いと判定されると、最小出力濃度レベルαと最大出力濃度レベルβとの入力を受け付け、受け付けた最小出力濃度レベルαと最大出力濃度レベルβとに基づいて画像データのダイナミックレンジWを広げる階調調整処理を行うい、階調調整が行われた画像データに基づいて記録処理を行う。
(もっと読む)
非固定カメラの動的パラメータ推定方法およびプログラム
【課題】非固定カメラ映像中の2次元座標と、対象空間における特定平面上の世界座標間で成立する射影関係(平面射影行列)を、時間軸方向の相関に基づき動的に推定する。
【解決手段】特定フレームに関する射影行列を推定し、射影行列が推定済みのフレームと未推定のフレーム間の対応点を複数抽出し、抽出された対応点に基づいて、未推定のフレームでの射影行列を推定することで、非固定カメラ画像中の2次元座標と、対象空間の3次元世界座標との間で成立する射影行列を推定する。
(もっと読む)
81 - 100 / 3,240
[ Back to top ]