
Fターム[5B057DC40]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 照合 (10,006) | 辞書の作成、変更、更新 (766) | 学習機能 (505)
Fターム[5B057DC40]に分類される特許
1 - 20 / 505
撮像装置及び方法、並びに画像生成装置及び方法、プログラム
検査システム及びレシピ設定方法
同期されたユーザインタフェース機能を含むマシンビジョンシステムプログラム編集環境
病理診断支援装置、病理診断支援方法、及び病理診断支援プログラム
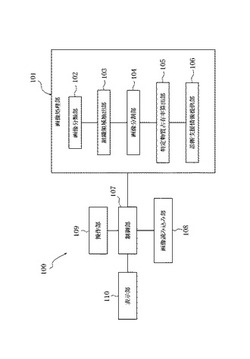
【課題】線維化に関連する特定物質の占有率を自動で算出して診断支援情報として提供することができる病理診断支援装置、病理診断支援方法、及び病理診断支援プログラムを提供する。
【解決手段】本発明による病理診断支援装置100は、染色標本画像の画素値に基づいて、標本画像中の病変を検出するための指標となる少なくとも1種の特定物質を分類する画像分類部102と、標本画像に含まれる組織領域を抽出する組織領域抽出部103と、組織領域を複数の区画に分割する画像分割部104と、画像分類の結果に基づいて、複数の区画のそれぞれについて、少なくとも1種の特定物質の区画内での占有率を算出する特定物質占有率算出部105と、算出した複数の区画の占有率から、標本画像における特定物質占有率の中間値を決定し、当該中間値を診断支援情報として提供する診断支援情報提供部106と、を備える。
(もっと読む)
画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境

【課題】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境を提供する。
【解決手段】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのためのマシンビジョンシステム編集環境が提供される。一形態では、新しい共通シンタックス及び表現が利用され、2つのステージで実行されるパートプログラムを実行し、そのような連続画像取得動作が通常動作と同じ方法で記録される。最初のステージでは、画像取得の連続ストリームを持つパートプログラムの一部が画像取得動作のためにスキャンされ、画像取得プロセスが開始された後に、画像を取得するために最も効果的な命令が決定される。そして、第2のステージでは、画像取得プロセスが実行されている間に、パートプログラムの一部が再度スキャンされ、そして画像解析動作が実行される。
(もっと読む)
マシンビジョンシステムのパートプログラム編集環境内で編集初期化ブロックを利用するシステム及び方法
【課題】マシンビジョンシステムのパートプログラム編集環境内で編集初期化ブロックを利用するシステム及び方法を提供する。
【解決手段】パートプログラムの編集初期化ブロックを定義及び利用する方法が提供される。パートプログラムは、一部を測定するための複数のステップを備え、編集インタフェースに表示される。編集インタフェースに、編集初期化ブロックに含めるステップを選択する選択肢が提供される。パートプログラムが保存された後に、編集のためにパートプログラムが呼び出されると、追加のステップがパートプログラムに追加される前に編集初期化ブロックが実行され得る。編集初期化ブロックにない初期パートプログラムステップによって取得されたデータの少なくともいくつかは、編集初期化ブロックを実行して決定されたデータに関連する推定データに基づいてもよい(例えば、基づいて変更されてもよい)。
(もっと読む)
画像処理装置、及び画像処理方法
【課題】画質の向上しつつ処理負担を軽減する。
【解決手段】実施形態の画像処理装置は、画像縮小手段と、移動量算出手段と、算出手段と、重畳手段と、を備える。画像縮小手段は、入力画像情報を所定の縮小率で縮小した縮小入力画像情報を生成する。移動量算出手段は、縮小入力画像情報と、入力画像情報よりも前に入力された画像情報を所定の縮小率で縮小した縮小前画像情報と、に基づいて、第1の表示領域単位で移動量を算出する。算出手段は、算出された第1の表示領域単位の移動量を、所定の縮小率の逆数である第1の拡大率で拡大して、入力画像情報の第2の表示領域単位の移動量を算出し、第2の表示領域単位の移動量に基づいて、入力画像情報に重畳する高周波成分画像情報の度合いを示した調整度合いを第2の表示領域単位で算出する。重畳手段は、算出手段により算出された調整度合いに従って、所定の高周波成分画像情報を、入力画像情報に重畳する。
(もっと読む)
車両情報登録方法、車両情報登録装置、及び車両情報登録プログラム
【課題】車両のモデルチェンジに伴う照合情報の登録に係るシステム管理者等の負担を軽減する。
【解決手段】車両を撮像する撮像部から画像を取得し、前記画像から、車両名称を表すマークの形状に係る特徴量である車両名称特徴量と、車両の形状に係る特徴量である車両特徴量と、を抽出し、車両名称、車両名称特徴量、車両特徴量を含む標準車両情報を車両毎に記憶する記憶部から、前記画像から抽出された車両名称特徴量に対応する車両特徴量を前記記憶部から取得し、前記記憶部から取得された車両特徴量と前記画像から抽出された車両特徴量とを照合し、所定の条件を満たす場合に、前記記憶部から取得された車両名称と前記画像から抽出された車両特徴量とに基づいて、新規の標準車両情報を前記記憶部に記憶する、処理をコンピュータが実行する。
(もっと読む)
車両認識装置、車両認識方法、プログラム
【課題】背景画像を抽出することなく、先行車両や対向車両の認識率を向上させることができる車両認識装置を提供すること。
【解決手段】撮影手段50が撮影した画像データからs偏光画像及びp偏光画像を作成する偏光画像作成手段101,102と、前記撮影手段が撮影した画像データから輝度画像を作成する輝度画像作成手段103と、s偏光画像及びp偏光画像から、路面に反射した車両ライトの画素領域を検出する反射領域検出手段104と、前記画素領域を車両認識の認識対象から除外した前記輝度画像から、前方の車両の光源を認識する車両認識手段105と、を有する車両認識装置100を提供する。
(もっと読む)
シミ分類方法、シミ分類装置およびシミ分類プログラム
【課題】シミを高精度に分類することができるシミ分類方法を提供する。
【解決手段】被験者の皮膚を撮影して得られた画像の色空間を変換した色空間変換画像を生成し、色空間変換画像に含まれるシミを検出し、検出されたシミについて、形態特徴量および色特徴量を算出し、算出された形態特徴量および色特徴量に基づいて、機械学習法によりシミを分類する。
(もっと読む)
画像処理装置および制御プログラム
【課題】多重露光撮影において、被写体の移動速度が遅い場合、あるいは撮影間隔が短い場合に、被写体同士が重なり合って煩雑な絵柄となり、被写体の輪郭も不明確となることがあった。この場合、観察者は、主要被写体を認識しづらく、視線が定まらずに不愉快な思いをすることもあった。
【解決手段】上記課題を解決するために、画像処理装置は、画像データを複数枚取得する取得部と、複数枚の画像データから、予め定められた条件に基づいて自動的に1枚の選択画像データを選択する選択部と、選択画像データと他の画像データの透明度を異ならせて1枚の合成画像データを生成する生成部とを備える。
(もっと読む)
画像処理方法及び画像処理装置
【課題】着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことが可能な画像処理方法等を提供する。
【解決手段】画像処理装置1は、分布算出部31、閾値決定部32、特性分離部33、及び計測部34の機能を備える。分布算出部31は、入力画像21を入力とし、画素値分布22及び画素値変化率分布23を出力する。閾値決定部32は、画素値分布22に基づく値を入力とする人工知能的アルゴリズムによって、閾値24を出力する。特性分離部33は、画素値分布22、画素値変化率分布23、及び閾値24を入力とし、これらを用いて入力画像21の領域を特性ごとの領域に分離し、特性領域25を出力する。計測部34は、特性領域25を入力し、特性領域25に基づいて計測処理を行い、計測結果26を出力する。
(もっと読む)
ドライバ支援システムのための、道路地形を検出する方法及びシステム
【課題】
本発明は、カメラ画像等の知覚入力に基づいて、車両の環境内における選択された位置を分類する方法を実行する道路地形検出システムについて記載する。
【解決手段】
本方法では、上記環境における、ベースポイントと称する選択された位置についての、高水準の空間特徴生成を行う。このベースポイントについての空間特徴生成は、環境の視覚的及び物理的特徴物を捉えた価値連続な信頼度表現に基づいて行われる。この信頼度表現は、生の知覚データを処理するいわゆる基本分類器により生成される。これにより、本道路地形検出では、センサデータから把握される局所的特徴物と、2段階の特徴抽出処理を経て取得されるこれら局所的特徴物の間の関連性とを組み込むことができる。
(もっと読む)
画像解析装置および画像評価装置
【課題】人物とその地点を代表するランドマークのようなオブジェクトとが被写体となるような撮影画像を解析してオブジェクトの位置を識別する。
【解決手段】オブジェクト探索領域抽出部303は、画像データから顔領域および胴体領域を除いてオブジェクト探索領域を抽出する。顕著領域候補抽出部304は、オブジェクト探索領域から複数の顕著領域候補を抽出する。独自色性算出部305は、オブジェクト探索領域の各画素の色情報を識別し、各色の独自色性を、その出現頻度および他の色との距離に基づいて定量的に算出する。存在確率算出部307は、オブジェクト領域の存在確率をブロック単位で算出する。オブジェクト領域識別部308は、各顕著領域候補の顕著領域としての尤度を算出し、最尤の顕著領域候補をオブジェクト領域に決定する。
(もっと読む)
特徴量抽出装置、対象物検出システム、コンピュータプログラム及び特徴量抽出方法
【課題】対象物と非対象物との間の本質的な違いが表れる特徴量を的確に抽出することができる特徴量抽出装置、対象物検出システム、コンピュータプログラム及び特徴量抽出方法を提供する。
【解決手段】特徴量候補決定部102は、各サンプル画素の任意の複数の波長でのスペクトル強度の変位に関連する特徴量候補を複数決定する。識別器生成部103は、決定した特徴量候補の中の一部の特徴量候補毎にブースティングを用いて対象物及び非対象物を識別するための識別器を生成する。特徴量抽出部105は、識別器を生成するために用いた特徴量候補を特徴量として抽出する。
(もっと読む)
画像評価装置、撮像装置およびプログラム
【課題】 簡易な操作で画像の評価にユーザの嗜好を反映させる。
【解決手段】 画像評価装置の画像評価部は、各々の候補画像から特徴量を抽出するとともに、特徴量を変数とする評価式を用いて複数の候補画像のうちから代表画像を選出する。表示処理部は、代表画像および複数の候補画像を表示装置に表示させる。入力部は、候補画像のうちから最適画像の指定を受け付ける。学習処理部は、代表画像の選出後に最適画像の指定があったときに、最適画像が代表画像として選出されるように評価式を調整する。
(もっと読む)
診断支援装置およびその制御方法、診断支援システム、プログラム
【課題】符号化されたデータから診断に有効な領域を優先的に読み出すことを可能とし、必要な画像を迅速に取得可能とする。
【解決手段】初期ストリーム設定部18及び入力制御部14の制御により、画像入力部11は、符号化画像データストリームのうち、まず、診断支援処理を可能とする低画質画像を再生可能な分を取り込む。懲り込まれたデータストリームは、復号化部12で復号化され、得られた2次元画像13が診断支援部16で解析されて陽性領域17が決定される。そして、入力制御部14が陽性領域17の部分を優先して取り込むべく画像入力部11を制御することにより、診断に有効な領域が優先的に取り込まれ、詳細に再生される。
(もっと読む)
眼球検出システムおよび眼球検出方法
【課題】ロバスト性が高く正確に対象者の眼球を検出可能な眼球検出システムを提供する。
【解決手段】本発明に係る眼球検出システム100は、ターゲット画像上での中心座標および拡大倍率を含む染色体を持つ個体の集団を生成する初期個体集団生成部120と、テンプレート画像180上の画素値と中心座標および拡大倍率によって指定されるターゲット画像上の画素値とに基づいて個体それぞれの適応度を算出する適応度演算部122と、中心座標および拡大倍率によって指定されるターゲット画像上の対象者の眼球領域198を基準として前額領域190、眉毛領域192、上眼瞼領域194または頬領域196を仮定する領域仮定部124と、これらの領域に基づいて適応度を修正した修正適応度を算出する修正適応度演算部126と、修正適応度に基づき遺伝的操作を実行する遺伝的操作実行部130と、を備えることを特徴とする。
(もっと読む)
データ処理システム、データ処理方法、リソースマネージャ装置、アクセラレータ装置及びプログラム
【課題】多数のユーザからの大容量な処理を高速に実行できる、高い汎用性と柔軟性とを有するデータ処理システムを提供する。
【解決手段】サーバコンピュータ21とアクセラレータ22とを有するデータ処理システム20において、リソースマネージャ23を設け、アクセラレータ22として、再構成可能なハードウェア回路を有するアクセラレータを使用する。リソースマネージャ23は、要求されたサービスの提供に必要な機能をソフトウェア機能とハードウェア機能とに分け、ソフトウェア機能についてはサーバコンピュータ21に割り当てて実行させ、ハードウェア機能に関してはアクセラレータ22に割り当て、割り当てたハードウェア機能に応じてアクセラレータ22のハードウェア回路を再構成し、アクセラレータ装置22にハードウェア回路によってハードウェア機能を実行させる。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法
【課題】移動体を高い精度で検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】検出ブロック設定部107は、撮像画像上で複数の画素で構成される任意の大きさの検出ブロックを複数設定する。評価値算出部109は、任意の時点tの撮像画像上で、設定した各検出ブロックが移動体の候補領域であるか否かを評価する評価値を検出ブロック毎に算出する。選択部110は、算出された評価値に基づいて、候補領域であると評価された1又は複数の検出ブロックを選択する。移動体領域検出部112は、選択した検出ブロックの撮像画像上の位置及び大きさに基づいて、撮像画像上の移動体領域を検出する。
(もっと読む)
1 - 20 / 505
[ Back to top ]