
Fターム[5B080GA02]の内容
イメージ生成 (11,603) | レンダリング (2,667) | 隠面消去(隠面処理) (448) | Zバッファ法 (359)
Fターム[5B080GA02]に分類される特許
1 - 20 / 359
三次元グラフィックスのデータの作成
衝突検出システム、ロボットシステム、衝突検出方法及びプログラム
【課題】 衝突検出対象オブジェクトの正確な衝突判定を実現できる衝突検出システム、ロボットシステム、衝突検出方法及びプログラム等を提供すること。
【解決手段】 衝突検出システムは、処理部10と、描画処理を行う描画部30と、衝突検出対象オブジェクトの外殻内面を見る視点を設定する視点設定部40とを含み、描画部30は、視点設定部40で設定された視点から見たときの衝突検出対象オブジェクトを描画する第1の描画処理を行うとともに、衝突検出対象オブジェクトの外殻内面のうち、第1の描画処理により描画された領域に対応する各ピクセルの深度値を生成し、生成した深度値に基づいて、衝突検出対象オブジェクト以外の他のオブジェクトを描画する第2の描画処理を行い、処理部10は、第1の描画処理と第2の描画処理の結果に基づいて、衝突検出対象オブジェクトが他のオブジェクトと衝突したか否かを判定する。
(もっと読む)
画像生成装置,画像生成プログラム,および,画像生成装置を有する画像表示システム

【課題】半透明なオブジェクトの後ろに不透明なオブジェクトが配置されている場合,半透明なオブジェクトと不透明なオブジェクトとが重なる領域を適切にぼかす。
【解決手段】画像生成部111は,3次元仮想空間において,半透明なオブジェクトが,不透明なオブジェクトよりも所定の視点位置側に配置され,かつ,2次元表示用画像において半透明なオブジェクトと不透明なオブジェクトが重なる場合,半透明なオブジェクトの透明度に応じて,この重なる領域のぼけ度を,不透明なオブジェクトのぼけ度の割合で補正する。
(もっと読む)
描画装置、描画方法及び描画プログラム
【課題】
シミュレーションデータ等に対する可視化処理において、可視化範囲のデータからその範囲を明瞭に表示するためのカラーマップを自動的に決定すること。
【解決手段】
三次元空間に形成されたモデルの各々の領域の物理値に基づいて、前記モデルについての可視化範囲を描画する描画装置において、前記可視化範囲を設定する設定部と、前記設定された可視化範囲に対応する前記モデルの各々の領域の物理値を前記描画装置の表示対象である可視化平面に射影する射影部と、前記可視化平面に射影された前記モデルの各々の領域の物理値に基づき、前記可視化範囲において物理値を塗り分ける範囲を特定する特定部と、前記物理値の範囲に基づき、物理値と色との関係を定める色情報を定義する定義部と、前記定義された色情報と前記特定された物理値を塗り分ける範囲とに基づき、前記可視化範囲を塗り分ける描画部と、を有する。
(もっと読む)
プログラム、情報記憶媒体、画像生成装置及びサーバ
【課題】少ない処理負荷で、違和感の少ない立体視画像を生成することが可能なプログラム、情報記憶媒体、画像生成装置及びサーバを提供すること。
【解決手段】第1の画像と第2の画像に基づき、立体視画像を生成する処理を行う場合に、第1の画像生成部が、スクリーンに対応する特定バッファの各画素に、前記第1の仮想カメラに対して最前面にあるプリミティブの情報を記憶させる処理を行い、第2の画像生成部が、ピクセル処理前に、第2の画像の画素毎に、第1の画像から流用可能な画素の画像情報が存在するか否かを判定する処理を行い、第1の画像から流用可能な画素の画像情報が存在する場合に、前記ピクセル処理の替わりに、第1の画像の当該画素の画像情報を、第2の画像の画素の画像情報に流用する処理を行う。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】従来、同一の対象物の二次元画像と三次元画像とを効果的に用いて、必要な画像を得ることができなかった。
【解決手段】1以上の三次元の物体の画像データであり、位置情報と色情報と深さ情報とを有する複数のボクセル情報から構成される三次元画像と、1以上の三次元の物体を撮影した画像であり、三次元画像と位置合わせがされている画像であり、位置情報と色情報と深さ情報とを有する複数のピクセル情報から構成される深さ情報付き二次元画像を格納しており、深さ情報付き二次元画像に対して、深さ情報を用いて、第一の画像処理を行い、処理後深さ情報付き二次元画像を取得する深さ情報付き二次元画像処理部と、処理後深さ情報付き二次元画像と三次元画像とを重ね合わせた拡張像を生成する拡張像生成部と、拡張像を出力する出力部とを具備する画像処理装置により、必要な画像を得ることができる。
(もっと読む)
画像処理システム、装置、方法及び医用画像診断装置
【課題】立体画像のフォーカス位置を変更すること。
【解決手段】実施形態に係る画像処理システムは、立体表示装置と、受付部と、表示制御部とを備える。立体表示装置は、3次元の医用画像データであるボリュームデータに対してレンダリング処理が行われることで生成された複数の視差画像である視差画像群を用いて、立体視可能な立体画像を表示する。受付部は、前記立体画像の関心領域を受け付ける。表示制御部は、前記受付部によって受け付けられた関心領域に対応する前記ボリュームデータの位置で視線方向が交わる複数の視点位置に基づいて、該ボリュームデータに対してレンダリング処理が行われることで生成された視差画像群を前記立体表示装置に表示させる。
(もっと読む)
画像生成装置
【課題】表情豊かな画像を生成する画像生成装置を提供する。
【解決手段】 画像生成装置は、眼オブジェクトと、窓部を有する顔オブジェクトと、を仮想空間内に配置して画像表示装置に表示する画像を生成する画像生成装置であって、前記眼オブジェクトの表面は、第一の方向と、前記第一の方向に直交する第二の方向で曲率を異ならせるものであり、前記第二の方向の曲率は、前記第一の方向の曲率よりも大きい曲率とするものであり、前記第一の方向の曲率は、0とするものである。
(もっと読む)
描画装置
【課題】 画素のデータを記憶するバッファのメモリサイズを小さくする。
【解決手段】 描画装置は、図形の頂点情報を受け、図形の2次元表示面における座標を示す位置情報を少なくとも含む図形情報を頂点情報に基づいて生成する座標変換部と、座標変換部から図形情報を受け、図形の所定方向の描画範囲を図形情報に基づいて算出し、2次元表示面を分割した分割領域毎に、分割領域に描画される図形の図形情報を出力する選択部と、選択部から出力された図形情報に基づいて、分割領域の画像データを生成する画像生成部と、画像生成部により生成された画像データを記憶するラインバッファとを有している。
(もっと読む)
仮想GPU
【課題】仮想グラフィックス処理装置(VGPU)に関する技術及び構造を開示する。
【解決手段】ソフトウェアにとっては、VGPUが独立したハードウェアGPUのように映る。しかしながら、制御構造を使用することにより、及びGPUのいくつかの(ただし全てではない)ハードウェア要素を複写することにより、同じGPU上に2又はそれ以上のVGPUを実装することができる。例えば、複数のVGPUをサポートするGPU内に追加のレジスタ及び記憶スペースを加えることができる。サポートされる異なるVGPUに対応するタスク及びスレッドに、異なる実行優先度を設定することができる。異なるVGPUの仮想アドレス空間の使用を含めて、VGPUのメモリアドレス空間を管理することもできる。異なるVGPUの実行を中断及び再開することにより、より細かい粒度の実行制御及びより良いGPU効率を可能にすることができる。
(もっと読む)
画像描画装置
【課題】コストを抑えながら効率的にラスタライズ処理を行う画像描画装置を提供する。
【解決手段】ブロック単位に、当該ブロックに描画されるプリミティブの頂点のプリミティブパラメータを第1のメモリから読み出し、ブロック内の各画素について、前面に描画されるプリミティブの識別情報を生成し第2のメモリのプリミティブ番号メモリに書き込む描画プリミティブ識別情報生成部と、ブロック単位に、プリミティブの描画命令の入力順に、対象プリミティブのプリミティブパラメータを第1のメモリから読み出すと共に、プリミティブ番号メモリに対象プリミティブの識別情報を有する画素について画素データを生成し書き込む画素データ生成部とを有し、描画プリミティブ識別情報生成部は、前記識別情報の生成中に、ブロックに描画され入力順の最も早いプリミティブの識別情報を先頭識別情報として保持し、画素データ生成部は、先頭識別情報のプリミティブから入力順に、プリミティブパラメータを読み出す。
(もっと読む)
画像処理装置、画像処理方法および画像表示装置
【課題】低い計算コストで複数のZ値を圧縮し、複数のZ値を示す圧縮データをZバッファに格納することができる画像処理装置を提供する。
【解決手段】画像処理装置は、3次元空間における奥行き方向の位置を示すZ値を記憶するためのZバッファを用いて、3次元空間のポリゴンを2次元平面の画像として描画する画像処理装置であって、ポリゴンを示すポリゴンデータから、ポリゴンの描画領域における複数の画素に対応する複数のZ値を生成する生成部1101と、奥行き方向に沿う予め定められた視線方向を示す視線データと、ポリゴンデータとを用いて、複数のZ値を圧縮するか否かを決定する決定部1102と、複数のZ値が圧縮される場合、複数のZ値から代表Z値を決定し、決定された代表Z値を複数の画素に関連づけてZバッファに格納する格納処理部1103とを備える。
(もっと読む)
医用画像診断装置及び画像処理装置
【課題】立体視される医用画像の奥行き感が低減することを回避すること。
【解決手段】実施形態の医用画像診断装置としての超音波診断装置は、レンダリング処理部17bと、モニタ2と、制御部18とを備える。レンダリング処理部17bは、3次元の医用画像データであるボリュームデータに対して複数視点からレンダリング処理を行なうことで、所定視差数の視差画像である視差画像群を生成する。モニタ2は、視差画像群を表示することで、観察者により立体的に認識される立体画像を表示する。制御部18は、モニタ2において視差画像群を表示する第1領域と、モニタ2において視差画像群以外の情報を示す情報画像を表示する第2領域とが識別可能となる視差画像群と情報画像との合成画像群がモニタ2に表示されるように制御する。
(もっと読む)
プログラム、情報記憶媒体、及びサーバ
【課題】移動体をターゲットオブジェクトの方向に容易に移動させることが可能なプログラム、情報記憶媒体、及びサーバを提供する。
【解決手段】移動体の前後方向を第1の軸とし、第1の軸回りに移動体を回転させる第1の入力情報と、移動体の左右方向を第2の軸とし、第2の軸回りに移動体を回転させる第2の入力情報と、移動体の上下方向を第3の軸とし、第3の軸回りに移動体を回転させる第3の入力情報とを個別に受け付け、第1の入力情報に基づき第1の軸回りに移動体を回転させる第1の回転処理と、第2の入力情報に基づき第2の軸回りに移動体を回転させる第2の回転処理と、第3の入力情報に基づき第3の軸回りに移動体を回転させる第3の回転処理とを行い、第2の入力情報に基づく第2の回転処理中に、移動体とターゲットオブジェクトとの位置関係に基づいて、第1の回転処理及び第3の回転処理の少なくとも一方の補正処理を行う。
(もっと読む)
画像処理システム、装置及び方法
【課題】立体画像とともに表示されるカーソルの位置を観察者に把握させることができる画像処理システム、装置及び方法を提供すること。
【解決手段】実施形態に係る画像処理システムは、立体表示装置と、レンダリング処理部と、表示制御部とを備える。立体表示装置は、複数の視差画像を用いて立体視可能な立体画像を表示する。レンダリング処理部は、3次元の医用画像データであるボリュームデータに対して、該ボリュームデータと相対的な位置が異なる複数の視点位置からレンダリング処理を行うことにより複数の視差画像を生成する。表示制御部は、前記レンダリング処理部によって生成された複数の視差画像とともに、前記立体表示装置にて立体画像が表示される3次元の立体画像空間において所定の入力部によって操作可能なカーソルの奥行き方向の位置を表す所定の図形の画像である図形画像を前記立体表示装置に表示させる。
(もっと読む)
ピクセルマスクを用いたグラフィックシステム
【課題】ラスタライズされた境界プリミティブ中のピクセルを、ピクセルマスクの対応するピクセルが被覆ピクセルであるとき保持し、非被覆ピクセルであるとき廃棄する、グラフィックシステムを提供する。
【解決手段】システムは、境界プリミティブをラスタライズする境界プリミティブラスタライザを含み、プリミティブピクセルの選択はスクリーンに描画される形状に境界を付ける。形状に対しピクセルマスクを生成するピクセルマスクジェネレータを含み、ピクセルマスクは、それぞれが1つのプリミティブピクセルに対応する複数のマスクピクセルを含み、前記形状が該マスクピクセルの少なくとも閾量を覆うとき被覆ピクセルであり、前記形状が該マスクピクセルを覆わない非被覆ピクセルである。被覆マスクピクセルに対応するプリミティブピクセルは保持し、非被覆マスクピクセルに対応するプリミティブピクセルは廃棄するピクセルスクリーナを含む。
(もっと読む)
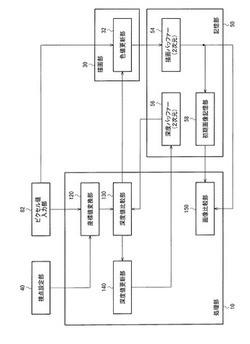
衝突検出システム、ロボットシステム、衝突検出方法及びプログラム
【課題】衝突検出対象オブジェクトの正確な衝突判定を実現できる衝突検出システム、ロボットシステム、衝突検出方法及びプログラム等の提供。
【解決手段】衝突検出システムは処理部と描画部と深度バッファーを含む。深度バッファーには、対象面に配置設定されるオブジェクトの深度情報を深度マップ情報が設定される。描画部は、深度テストを行って、深度バッファーを参照しながら、衝突検出対象オブジェクトを構成するプリミティブ面のうち、所定の視点から見て裏面のプリミティブ面を描画する第1の描画処理を行う。また深度テストを行わずに、衝突検出対象オブジェクトを構成するプリミティブ面のうち、視点から見て裏面のプリミティブ面を描画する第2の描画処理を行う。処理部は、第1の描画処理と第2の描画処理の結果に基づいて、衝突検出対象オブジェクトが対象面のオブジェクトと衝突したか否かを判定する衝突判定を行う。
(もっと読む)
三次元コンピュータ映像を発生するシステムのためのメモリマネージメントの改良
【課題】メモリの占有面積を減少すると共に性能を改善するメモリマネージメントシステム及び方法を提供する。
【解決手段】映像を複数の長方形エリアに細分化する手段と、各長方形エリアに対するオブジェクトデータを記憶する第1部分と深さデータを記憶する第2部分を有するメモリを準備する手段と、メモリの第1部分にオブジェクトデータを記憶する手段と、オブジェクトデータから深さデータを導出する手段と、深さデータをメモリの第2部分に記憶する手段と、置き換えるようにメモリの第1部分にオブジェクトデータをロードする手段と、記憶された深さデータを検索するステップと、記憶された深さデータから更新された深さデータを導出し、置き換えるように記憶する手段と、メモリにロードすべきオブジェクトデータがなくなるまで前記4つのステップを繰り返す手段と、表示のために、映像データ及び陰影付けデータを深さデータから導出する手段と、を備える。
(もっと読む)
三次元コンピュータ映像を発生するシステムのためのメモリマネージメントの改良
【課題】メモリの占有面積を減少すると共に性能を改善するメモリマネージメントシステム及び方法を提供する。
【解決手段】映像を複数の長方形エリアに細分化しメモリの1つ又は複数の第1部分にオブジェクトデータを記憶し、各長方形エリアに対する深さデータをメモリの1つ又は複数の第2部分に記憶し、既存のコンテンツの少なくとも一部分に置き換えるように更なるオブジェクトデータをロードして、記憶された深さデータを検索するときに、新たなオブジェクトデータ及び記憶された深さデータから各長方形エリアの各画素に対する更新された深さデータを導出し、その更新された深さデータを、以前に記憶された深さデータに置き換えるように記憶して、メモリにロードすべき更なるオブジェクトデータがなくなるまでこれをを繰り返して、表示のために映像データ及び陰影付けデータを深さデータから導出する。
(もっと読む)
グラフィックスプロセッサの並列アレイアーキテクチャ
【課題】高い並列度を維持したままで、異なるシェーダーの変動する負荷に適応できるグラフィックスプロセッサを提供する。
【解決手段】グラフィックスプロセッサの並列アレイアーキテクチャは、複数の処理クラスタを含み、各処理クラスタがカバレッジデータから画素データを生成するピクセルシェーダープログラムを実行する少なくとも1個の処理コアを含む、マルチスレッド型コアアレイと、複数の画素のうちの1画素毎にカバレッジデータを生成するラスタライザと、ラスタライザからマルチスレッド型コアアレイ中の処理クラスタのうちの1つにカバレッジデータを配信する画素分配ロジックとを含む。画素分配ロジックは、画像エリアの範囲内の第1画素の位置に少なくとも部分的に依存して第1画素のためのカバレッジデータが配信される処理クラスタのうちの1つを選択する。画素データが処理クラスタから適切なフレームバッファ区画へ直接的に配信される。
(もっと読む)
1 - 20 / 359
[ Back to top ]