
Fターム[5C054CA04]の内容
閉回路テレビジョンシステム (47,623) | 線源 (1,941) | 電磁波 (1,826) | 可視光線 (1,325)
Fターム[5C054CA04]に分類される特許
1 - 20 / 1,325
内視鏡用中間モジュール
吊荷周辺の物体の高さ情報通知システム
駐車支援装置
画像処理装置及び画像処理方法
車両周辺撮影装置および車両周辺画像の処理方法
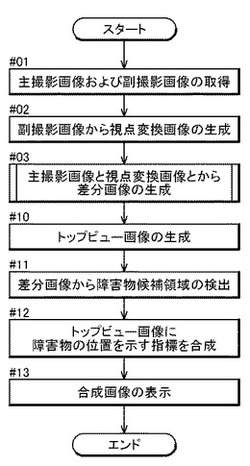
【課題】高精度に車両周辺の障害物を検出することができる車両周辺撮影技術を提供する。
【解決手段】車両の周辺の情景を撮影する第1カメラと、第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラと、が車両に搭載されている。第1カメラと第2カメラとの一方を主カメラとするとともに他方を副カメラとし、主カメラにより撮影された画像を主撮影画像とするとともに副カメラにより撮影された画像を副撮影画像とする。視点変換部13は、副撮影画像を主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成する。画像差分部14は、比較情報として主撮影画像と視点変換画像との差分画像を生成する。
(もっと読む)
車載カメラシステム及びその較正方法、及びその較正プログラム

【課題】撮像部の 内部パラメータと外部パラメータを容易に較正できる車載カメラシステムの較正方法を得ること。
【解決手段】車載カメラシステム1の較正方法は、撮像部307〜310により撮像された画像から予め設定された直線部分を有する認識対象物を認識し、画像から認識対象物の特徴点を抽出し、その特徴点を仮想球面に投影して仮想球面601に形成された特徴点列の形状に基づいて撮像部307〜310の内部パラメータを推定し、推定した内部パラメータを較正するとともに、特徴点に基づいて画像の俯瞰視点を算出し、その算出した俯瞰視点に基づいて撮像部307〜310の外部パラメータを推定し、その推定した外部パラメータを較正することを特徴としている。
(もっと読む)
画像間差分装置および画像間差分方法
【課題】外乱の影響を受け難いロバストな画像間差分技術を提供する。
【解決手段】勾配方向算出部14aは、画像を構成する各々の画素の画素位置における画素値の勾配方向を求める。ヒストグラム生成部14bは、各々の画素を対象画素として設定するとともに、対象画素の周囲にヒストグラム算出領域を設定し、ヒストグラム算出領域に含まれる画素の画素位置における勾配方向の度数分布を対象画素の画素位置におけるヒストグラムとして生成する。画素差分部14cは、第1の画像の差分対象画素の画素位置におけるヒストグラムと、第2の画像の比較対象画素の画素位置におけるヒストグラムと、の差分値を差分対象画素と比較対象画素との画素差分値として算出する。画像差分部14は、差分対象画素の画素位置における画素値を画素差分値に基づいて設定することにより差分画像を生成する。
(もっと読む)
俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置
【課題】撮像画像を俯瞰画像に変換する変換パラメータを簡易に調整できる俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置を提供する。
【解決手段】俯瞰変換部23が、画像を射影変換により俯瞰画像に変換する俯瞰パラメータを記憶する俯瞰パラメータ記憶部25から読み出した俯瞰パラメータを用いて、カメラ10により撮像された撮像画像を俯瞰画像に変換し、間隔指標算出部24bが、等間隔のパターンの標示が撮像された撮像画像を変換した俯瞰画像上で標示のパターンの間隔が揃う度合を示す間隔指標値を算出し、俯瞰パラメータ算出部24cが、算出された間隔指標値に基づいて、俯瞰画像上で標示のパターンの間隔が所定の範囲内で揃う俯瞰パラメータを算出して俯瞰パラメータ記憶部25に記憶する。
(もっと読む)
会話映像表示システム
【課題】視聴者が会話人物の視線方向を分かりやすく、会話人物の存在感を感じられる会話映像表示システムを提供する。
【解決手段】会話画像及び会話の各人物の頭部姿勢データを処理して会話状況を映像表示するシステムであり、各人物の位置と対応して配置された複数のスクリーン403と、各スクリーン403に各人物毎の画像を投影する映像投影装置401と、スクリーン403の姿勢を制御するアクチュエータ402と、スクリーン403の姿勢を、それに投影される画像中の人物の頭部姿勢と同期して変化させるべく、頭部姿勢データからアクチュエータ402の制御信号を生成する制御信号生成手段303と、画像上における各人物の顔領域を検出する顔位置検出手段301と、画像中の検出された顔領域を中心とした領域を、その人物の画像が投影されるスクリーン403の姿勢に応じて写像して映像投影装置401に出力する画像写像生成手段302を有する。
(もっと読む)
車両周辺監視用画像生成装置
【課題】魚眼レンズのような広角レンズを用いた撮影画像であっても、車両周辺監視に適したモニタ表示画像を作成することができる画像生成装置の提供。
【解決手段】広角レンズを装着した車載カメラ1によって取得された車両周辺の撮影画像を入力する画像入力部51と、撮影画像の横方向に延びる歪み補正基線によって上下方向で区分けされた撮影画像領域に対して個別に、広角レンズの縦方向のレンズ歪みを補正する画素単位の歪み補正量の強度を設定する補正強度設定部55と、補正強度設定部55によって設定された歪み補正強度に基づいて撮影画像に対する歪み補正を実行する歪み補正実行部54と、歪み補正実行部54によって補正された撮影画像からモニタ表示画像を出力するモニタ表示画像出力部58とが備えられている。
(もっと読む)
検査装置
【課題】検査に必要な画像データを、撮影条件を変更しながら複数回撮影することにより、適正な画像データを用いた高精度な検査装置を得る。
【解決手段】撮影条件の異なる複数の画像を撮影する撮像手段2と、撮像手段2の撮影画像を複数の領域に分割して符号化する符号化手段3と、符号化手段3の符号化データを複数画像分だけ格納する記憶手段4と、記憶手段4に格納された符号化データを送信する送信手段5と、送信手段5からの符号化データを復号する復号手段9と、復号手段9により復号された画像から被写体の検査を行う検査手段10と、検査手段10からの検査命令および送信命令に応答して記憶手段4内の符号化データを検査手段10へ送信する制御手段6とを備える。検査手段10は、記憶手段4に格納された符号化データのうち、複数の画像データの中から任意の領域を指定して送信させる。
(もっと読む)
カメラシステム
【課題】 多数のカメラを設置すること無く、かつ、死角を生じることがない、操作性に優れたカメラシステムを提供する。
【解決手段】 被写体103との距離である被写体距離を検出する被写体距離検出手段を備えたカメラ101と、カメラの撮影方向を変更可能な撮影方向変更手段と、カメラを移動させる移動手段と、移動手段により移動した移動距離を検出する移動距離検出手段と、被写体距離と移動距離により、カメラと被写体との角度を算出し、前記角度を元に撮影方向変更手段によりカメラの撮影方向を変更する制御手段とを有する。
(もっと読む)
運転支援装置
【課題】ドアの開放による自車の外形輪郭の変化にも対応可能で、運転者からの死角領域の発生も抑制される、俯瞰画像表示タイプの運転支援装置を提供する。
【解決手段】車両の周辺領域を撮影する車載カメラによって取得された撮影画像を上方仮想視点で射影変換することで撮影俯瞰画像を生成する俯瞰画像生成部と、車体を示す車体俯瞰画像を出力する車体画像出力部と、開放状態のドアを示すドア俯瞰画像における外側輪郭部以外の領域を透明化または半透明化した透明ドア俯瞰画像を出力するドア画像出力部と、撮影俯瞰画像と車体俯瞰画像と透明ドア俯瞰画像とが画像合成された運転支援画像をモニタ表示画像として生成する画像合成部とが備えられている。
(もっと読む)
情報出力装置、検知装置、プログラム及び情報出力方法
【課題】種々の誤検知発生要因に対応することが可能な情報出力装置、検知装置、プログラム及び情報出力方法を提供する。
【解決手段】被写体を撮影した画像に関する情報を出力する情報出力装置であって、前記画像を1又は複数の画像エリアに分割する分割手段と、撮影時間の異なる複数の前記画像から当該画像間の差分となる特徴量を前記画像エリア毎に算出する特徴量算出手段と、前記特徴量算出手段で算出された各画像エリアの特徴量に基づいて、前記特徴量に変化のある画像エリアを検知する画像エリア検知手段と、前記画像を構成する各画像エリアから、前記被写体のおかれる環境に応じて定まる条件に該当する画像エリアを特定する特定手段と、前記検知手段が検知した画像エリアから前記特定手段にて特定された画像エリアを除いた画像エリアに関する情報を出力する出力手段と、を備える。
(もっと読む)
撮像ユニット、内視鏡及び撮像ユニットの製造方法
【課題】撮像素子が実装された後のフレキシブルプリント配線板の厚さが薄く、小型な撮像ユニット及び前記撮像ユニットを備えた内視鏡と前記撮像ユニットの製造方法を提供する。
【解決手段】撮像素子、及びフレキシブルプリント配線板を含む撮像ユニットにおいて、前記撮像素子は、受光部、前記受光部に電気的に接続された金属配線層、前記金属配線層に形成された金属パッド、及び前記金属パッドを受光側とは反対側に露出させるように設けられた開口部、を含み、前記フレキシブルプリント配線板は、前記開口部内において前記金属パッドと電気的に接続される金属線を含み、かつ前記撮像素子の受光側とは反対側の面上に接着剤によって接着される。
(もっと読む)
映像検出装置および映像検出方法並びに映像検出プログラム
【課題】所望の事象の進展を表す映像に類似した映像を高い精度で検出する映像検出装置および映像検出方法並びに映像検出プログラムを提供する。
【解決手段】所望の事象の進展を表す基準映像を保持する保持部と、前記基準映像に基づいて、当該基準映像における前記事象の進展の速度を含む複数の速度で前記事象の進展を表す複数の調整映像を生成する生成部と、蓄積装置に蓄積された各蓄積映像と、前記複数の調整映像のそれぞれとの類似度を評価する評価部と、前記評価部で得られた評価結果に基づいて、前記複数の調整映像のいずれかに類似する前記蓄積映像を、前記基準映像に類似する映像として取り出す検出部とを有する。
(もっと読む)
色調調整装置および電子内視鏡装置
【課題】照明用光源の経時的な分光分布の変化による撮影画像の色調変化を防止する。
【解決手段】光源21の光を照明として撮像素子14において画像を撮影し、前段映像信号処理回路18において撮影画像のホワイトバランスを調整する。光源21からライトガイド22に至る光路上にビームスプリッタ31を配置し、光源21の光束の一部を受光センサ32において受光する。受光センサ32で実測された3刺激値とメモリ34に記録された3刺激値の基準値とを比較し、光源21の分光分布変化を検出する。これに基づきホワイトバランス処理におけるR、Bゲインを補正し、分光分布が変化したことによる撮影画像の色調の変化を防止する。
(もっと読む)
映像解析装置及びシステム
【課題】 多様な動的物体が現れるシーンを高速に解析する映像解析装置を提供する。
【解決手段】 入力された映像のフレーム画像102から、動的な物体が存在する領域を検出する動的物体領域検出部103と、この検出された動的物体領域検出部で検出された物体のカテゴリを判別する物体カテゴリ判別部104とを有し、この物体領域と物体カテゴリ判別部で判別されたカテゴリから、映像中の各座標において物体が現れる確率を表す「存在確率マップ」を生成し、それを時系列データで保存することで、一定のタイムスパンにおける各カテゴリの存在確率マップを生成する。
(もっと読む)
運転支援装置
【課題】立体表示された走行予想軌跡線の下枠線と上枠線の関係を直感的に判断することのできる運転支援装置を提供することを目的とする。
【解決手段】撮像装置7から入力された自車両外部の撮像画像に不揮発性メモリ4から読み出された自車両の立体的な走行予想軌跡線30を重畳して外部の表示装置12に出力する映像処理装置3と、ステアリングセンサ10から入力されたハンドル角度信号に基づいて、映像処理装置3が重畳する立体的な走行予想軌跡線30の向きを制御する制御手段5とを備え、走行予想軌跡線30は、立体の下面側を示す第1の軌跡線31と立体の上面側を示す第2の軌跡線32とを有し、かつ、立体側面33を第1の軌跡線31と前記第2の軌跡線32で挟まれた空間で構成し、制御装置5は、映像処理装置3に、走行予想軌跡線30の立体側面33の色の濃度を高さ方向に向けて段階的に変化させる。
(もっと読む)
車両周辺監視装置
【課題】物体が存在しない場所で、誤ってオプティカルフローを検出することのない車両周辺監視装置を提供する。
【解決手段】カメラ(撮像手段)100で異なる時刻に撮像した2つの画像に基づいて、オプティカルフロー検出手段240が第1のオプティカルフロー(F1)を検出し、オプティカルフロー推定手段230が、仮想面設定手段220によって路面から所定距離だけ高い位置に設定された第1の仮想面の上に生じる第2のオプティカルフロー(F2)を推定して、オプティカルフロー差分演算手段250が、F1からF2を差し引いて、物体検出手段260が、差分演算結果に基づいて車両の周辺に存在する物体を検出し、接触判定手段270が、物体が車両10に接触する可能性があると判定したときに、警報出力手段400が警報を出力する。
(もっと読む)
1 - 20 / 1,325
[ Back to top ]