
Fターム[5C054DA08]の内容
閉回路テレビジョンシステム (47,623) | 伝送 (2,853) | 伝送路 (2,653) | 有線 (1,805)
Fターム[5C054DA08]の下位に属するFターム
電話回線;音声回線;データ回線 (782)
光ケーブル (20)
Fターム[5C054DA08]に分類される特許
1 - 20 / 1,003
物体検出装置、監視カメラ、及び物体検出方法
車両周辺監視装置
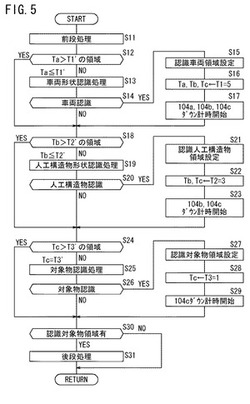
【課題】 車両に搭載された赤外線カメラにより撮像した画像から監視しようとする対象物を認識し、認識した対象物を車両の運転者に提供する車両周辺監視装置の処理負荷を軽減する。
【解決手段】認識処理部102は、画像に含まれる複数種別の物体(車両、人工構造物、又は歩行者等の対象物)毎に個別認識処理{車両形状認識処理(ステップS13)、人工構造物形状認識処理(ステップS19)、対象物認識処理(ステップS25)}を実行する。除外継続時間設定部106は、前記個別認識処理の結果、認識された物体の画像領域に対して、前記物体の種別に応じて、前記認識処理の効果を継続する除外継続時間T1、T2、T3を設定する。除外継続時間T1、T2、T3が設定された前記画像領域については、解除残時間T1′、T2′、T3′となるまで、当該物体の個別認識処理を行わないようにしたので、処理負荷を軽減することができる。
(もっと読む)
火災報知設備

【課題】各火災感知器の状態情報と各カメラ端末の画像情報を同一の信号線で収集する
こと。
【解決手段】信号線を介して、複数の火災感知器と火災受信機とが接続された火災報知設備において、前記信号線を介して、複数のカメラ端末が前記火災受信機と接続され、前記火災受信機が、前記複数の火災感知器および複数のカメラ端末を監視制御して、各火災感知器の状態情報および各カメラ端末の画像情報を収集して表示することを特徴とする。
(もっと読む)
車両周辺監視装置
【課題】本発明は、画像認識における誤検出、あるいは、不検出の発生時、発生要因のデータを学習し、誤検出や不検出を繰り返さず、認識精度を向上することができる車両周辺監視装置を提供する。
【解決手段】撮影手段1で入力された画像に対して、対象物検出処理部3によって検出された対象物について、誤検出、あるいは、不検出の場合、ユーザ入力手段6により出力手段7上で該当領域を指定する。画像認識DB修正部4は、誤検出領域の辞書データを修正し、修正したデータを画像認識DB5の辞書データに格納する。
(もっと読む)
画像表示装置及び画像表示方法
【課題】移動体に搭載された画像表示部に対するドライバの視認性が下がることを抑制しつつ、同画像表示部に表示障害が発生した場合においても、同画像表示部に表示すべき画像をドライバに対して表示することが可能な画像表示装置及び画像表示方法を提供する。
【解決手段】
移動体に搭載された表示部110に画像を表示する表示手段と、前記移動体内に存在する通信端末機器130を検知する端末機器検知手段と、前記端末機器検知手段により前記移動体内に通信端末機器130が検知された場合に、前記移動体に搭載された表示部110に表示すべき画像を、前記通信端末機器の表示画面に表示する通信制御手段と、を備えることを特徴とする画像表示装置10。
(もっと読む)
伝送システム、伝送機器セット、及びIPカメラの敷設方法
【課題】単一の同軸ケーブルによって、アナログカメラの映像信号とIPカメラの映像信号との同時伝送を実現し得る、伝送システム、それに用いる伝送機器セット、及びIPカメラの敷設方法を提供する。
【解決手段】伝送システム10は、アナログカメラ20と、IPカメラ30と、同軸ケーブル11と、IPカメラ30の信号を同軸ケーブル11での伝送が可能な信号に変換する同軸ケーブルモデム31と、ハイパスフィルタ32及び33と、ローパスフィルタ21とを備える。アナログカメラ20は、同軸ケーブル11に接続される。IPカメラ30は、信号伝送経路16によって、同軸ケーブルモデム31及びハイパスフィルタ32を順に介して同軸ケーブル11に接続される。ローパスフィルタ21は同軸ケーブル11の出力端に接続される。ハイパスフィルタ33は信号伝送経路17によって同軸ケーブル11の出力端に接続される。
(もっと読む)
車両周辺監視装置
【課題】単一の撮像装置で撮像した場合であっても、カーブミラーを歩行者と誤検知する可能性を軽減することができる車両周辺監視装置を提供する。
【解決手段】カーブミラー判定部104は、撮像画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体、すなわち人体の頭部候補及びミラー本体候補として抽出するカーブミラー可能性物体抽出部104aと、抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体の有無を検知する支柱形状物体検知部104bと、を有し、抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する。
(もっと読む)
映像監視レコーダ
【課題】ユーザ側の要求に応じて様々なスペックのレコーダを構成することのできる映像監視レコーダを得る。
【解決手段】仮想化部12は、ハードウェアリソース11を用いて、監視データを記録するレコーダ11a〜11nを仮想的に構築する。割り当て量算出部13は、端末2から入力される監視データのパラメータに基づいて、監視データを記録するのに必要なハードウェアリソース11の値を算出し、ハードウェアリソース11の値からレコーダ11a〜11nへの割り当て量を算出する。仮想化部12は、割り当て量算出部13で算出された割り当て量でレコーダ11a〜11nを管理する。
(もっと読む)
動画像表示装置、動画像表示方法、プログラムおよび動画像処理表示システム
【課題】マシンへの負荷を抑制しつつ、ユーザが見たいアングルの動画像にリアルタイムに切り替えることができる動画像表示装置、動画像表示方法、プログラムおよび動画像処理表示システムを提供すること。
【解決手段】時間・アングル動画像データから、時間情報の時間順に時間情報とアングル情報とに対応するフレームをフレームごとに読み出す読み出し手段232と、時間情報の時間順にフレームごとに表示する表示手段24と、動画像のアングル切り替え指示を入力する指示入力手段と22とを備え、読み出し手段232は、指示入力手段22が指示座標内において隣り合う前記アングル情報を超えてアングル切り替えの指示を連続して入力すると、当該入力時の時間情報と、切り替え指示されたアングル情報とに対応するフレームを連続して読み出し、表示手段24は、読み出し手段232によって読み出されたフレームに連続して切り替えて表示することを特徴とする。
(もっと読む)
撮像装置、撮像装置の作動方法及び内視鏡装置
【課題】通信状態が切り替わった場合でも、転送したデータの続きからデータ転送が行われる撮像装置、撮像方法及び内視鏡装置を提供すること。
【解決手段】ヘッド部と、ヘッド部から送信される画像信号を処理する本体部とが分離したヘッド分離型の撮像装置であって、ヘッド部は、画像信号および又は補正データを符号化し、本体部は、ヘッド部と無線通信を確立し、受信した符号化された画像信号および又は補正データを復号する。
(もっと読む)
車載カメラ用画像補正方法および車載カメラ用画像補正プログラム
【課題】形状や寸法が既知の図形を用いることなく車載カメラの現在の取り付け角度を求めることができる車載カメラ用画像補正方法および車載カメラ用画像補正プログラムを提供する。
【解決手段】車載カメラ用画像補正方法は、車両に取り付けられたカメラが車両の周囲を撮像するステップS1と、カメラにより撮像された画像内の路面画像にもとづいて動きベクトルを検出するステップS5と、検出された動きベクトルを、真上視点の動きベクトルとなるように車両の進行方向軸、路面法線方向軸ならびに進行方向軸および路面法線方向軸に直交する路面平行方向軸の3軸の各軸周りに独立に回転補正させるための式である真上視点の動きベクトルへの変換式を作成するステップS6と、真上視点の動きベクトルへの変換式からカメラの車両に対する取り付け角度を求めるステップS7と、を有する。
(もっと読む)
可動式ホーム柵監視用カメラ装置
【課題】都市部の駅ホームや、地下鉄の駅ホームでは、駅ホームのスペースが狭く、列車の乗降口または可動式ホーム柵の開閉部を広範囲にするための監視用カメラ装置のカメラ部の設置スペースを十分に確保できない。
【解決手段】本発明の可動式ホーム柵監視用カメラ装置は、可動式ホーム柵と、反射鏡と、前記可動式ホーム柵内に設置し前記反射鏡を介して前記可動式ホーム柵を撮像するカメラ部と、前記カメラ部が撮像した画像から乗客を検出する画像処理部と、モニタとを備え、前記画像処理部は、前記カメラ部が撮像した画像から前記可動式ホーム柵の開閉部およびその周辺を切り出して合成した合成画像を作成し、前記モニタは、前記合成画像を表示する。
(もっと読む)
画像生成装置及び画像表示システム
【課題】車両の走行速度が所定の閾値より低い場合に周辺画像を表示させるときに、表示モードの切り替え無しに車両の周辺の必要な領域の状況をユーザに提供する。
【解決手段】画像表示システムでは、車両9の走行速度が所定の閾値より低くなりフロントモードM1に移行すると、フロントモードM1の開始時点では車両9の前方領域及び側方領域の双方を同時に表示可能な汎用性の高い前側方モードM11とされる。前側方モードM11で示される画面は、交差点への進入、すれ違い、幅寄せなどの想定される様々な状況に対応可能であることから、ユーザは表示モードを切り替えることなく、車両9の周辺の必要な領域の状況を確認することができる。
(もっと読む)
動画提示装置
【課題】歪曲広角画像上で任意の追跡対象物を自動追跡する。
【解決手段】魚眼撮影した歪曲広角画像Sを、メモリ130内にフレーム単位で入力する。変換部150は、格納部170内の切出条件に基づき、歪曲画像Sの点Pの位置から、φで示される向きに、サイズmの画像を切り出し、正則画像Tに変換してメモリ140に格納する。追跡開始点Qを含む追跡開始指示が与えられると、フラグ設定部220はフラグをONにし、点Qが新たな点Pになるよう更新する。基準色抽出部200は、新たな点Pの近傍色を基準色αとして抽出し、基準色格納部190に格納する。近隣ブロック抽出部160は、点Pの近傍ブロックを抽出し、ブロック選択部180は、基準色αに近似する画素数が最大となるブロックを選択する。自動変更部210は、選択ブロック内の基準色αに最も適合する色をもつ候補領域の中心点を新たな点Pとする更新を行う。
(もっと読む)
電子内視鏡装置
【課題】撮像と表示との同期を確保することができる電子内視鏡装置を提供する。
【解決手段】位相比較発振制御部156は、モニタ同期信号166と、プロセッサ側撮像クロック164との位相を比較し、比較結果に基づいて原振撮像クロック生成部154の発振を制御する。表示タイミング調整部152は、撮像用同期信号111とプロセッサ側撮像クロック164とモニタ同期信号166と表示クロック165とを用いて、デジタル画像信号110をモニタ同期信号166に同期して出力する。
(もっと読む)
画像処理装置、画像処理方法、及び画像処理ソフトウェア
【課題】正常部と異常部とを正確かつ明確に分別することが可能な画像処理装置を得る。
【解決手段】結果補正部120は、病変検出部110から対象静止画像及び参考静止画像の各検出結果を受信し、これらの検出結果を用いて、異常部の位置、大きさ、及び範囲を特定する。そして、参考検出結果R(t)が対象検出結果R(0)と1/4以上重複する参考静止画像を検出する。そして、重複する領域の画素数を参考重みG(t)とする。1/4以上重複しない参考静止画像に関しては、参考重みG(t)は0となる。次に、正規化重みg(t)を算出する。参考特徴量P(t)に正規化重みg(t)を乗じたものを全ての参考特徴量P(t)に関して求め、対象特徴量P(0)に加え、加算特徴量S(0)を求める。加算特徴量S(0)を用いて、対象静止画像における異常部を検出する。
(もっと読む)
災害監視システム、ネットワークカメラ及びレコーダ
【課題】災害が発生した場合に、面倒な手順を必要とせず、自動的に災害の発生した地点を監視するカメラの情報伝送量を増やす。
【解決手段】所定の地点を撮像して映像符号化する複数のネットワークカメラ2a〜2mと、各地点での災害発生を検出する災害センサ1a〜1mとを備え、ネットワークカメラ2a〜2mは、外部からの指示に従い映像符号化パラメータを設定変更するカメラモジュール装置21a〜21mと、災害センサ1a〜1mにより自機が撮像する地点で災害発生が検出された場合に、ネットワーク接続された各ネットワークカメラ2a〜2mのカメラモジュール装置21a〜21mに映像符号化パラメータの変更を指示することで、自機の情報伝送量を増加させる災害時制御装置23a〜23mとを備えた。
(もっと読む)
映像信号処理システム
【課題】早期にバックカメラ10からの映像をLCDパネル16に表示する。
【解決手段】システムの起動時において、ディスプレイコントローラ14は、メモリ20から設定データによる設定を行い、セレクタ54によりバックカメラ10から直接供給されるビデオ信号を選択し、これを解像度変換したビデオ信号をLCDパネル16に供給する。一方、システムコントローラ12が立ち上がった後に、セレクタ54によりシステムコントローラ12から供給されるビデオ信号を選択し、これをLCDパネル16に供給する。
(もっと読む)
電子内視鏡装置
【課題】撮像と表示との同期を確保することができる電子内視鏡装置を提供する。
【解決手段】位相比較部130は、プロセッサ内撮像側同期信号と表示側クロックとの位相を比較し、比較結果に基づいて表示側クロック生成部129の発振を制御する。表示タイミング調整部122は、内視鏡スコープ101から出力される映像信号を、プロセッサ内撮像側同期信号に基づくタイミングで受信し、受信した映像信号の同期タイミングを、プロセッサ内表示側同期信号に基づく同期タイミングに調整する。
(もっと読む)
マルチシステムコントローラ
【課題】初期設定作業を容易にするマルチシステムコントローラにおける映像入出力の初期設定方法を提供する。
【解決手段】同軸多重機能を搭載した監視カメラと組合せて使用し、監視カメラ映像入力および映像分配送信するための初期設定作業を有するマルチシステムコントローラにおいて、映像入出力の初期設定にて、ユニットとカメラの自動認証機能を有し、映像入力および映像出力ユニットのスロットナンバの若い順から、チャンネルを割り付けることを共通に定義する手段を有し、上記機能および定義を実行するソフトウェアプログラムを有する。
(もっと読む)
1 - 20 / 1,003
[ Back to top ]