
Fターム[5C054EA05]の内容
閉回路テレビジョンシステム (47,623) | 処理系 (4,343) | 受像系 (2,156)
Fターム[5C054EA05]に分類される特許
1 - 20 / 2,156
画像処理装置、車両、画像処理方法、及び、プログラム
吊荷周辺の物体の高さ情報通知システム
物体検出装置、監視カメラ、及び物体検出方法
内視鏡用中間モジュール
撮像装置、撮像方法およびプログラム
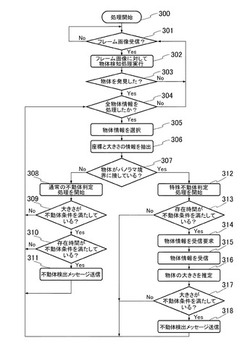
【課題】複数台の監視カメラの自律的な処理によって、パノラマ映像の境界に出現した物体が不動体であるか否かを判定する。
【解決手段】二つの監視カメラ21,22が取得する映像を合成してパノラマ映像を構築し、このパノラマ映像を用いて不動体を監視する監視装置であって、二つの監視カメラ21,22は物体を検出して物体情報を生成し、一方の監視カメラは、映像の外周に接する物体を検出した場合には、当該検出した物体の存在時間が不動体条件を満たすかを判定し、満たす場合には、他方の監視カメラ22が生成した物体情報を受信して一方のカメラ21自身が生成した物体情報と結合して新たな物体情報を生成し、生成した新たな物体情報を用いて物体の大きさが不動体条件を満たすかを判定する。
(もっと読む)
移動方向識別装置

【課題】 検出した人物の移動方向を推定し、移動方向から監視対象外の人物に対する検出を棄却することで、監視効率を向上させる。
【解決手段】 時間軸上で連続する個々の画像を複数領域に分割して分割した領域毎に領域内の輝度変化を状態変化量として算出する時間変化抽出部2と、複数の連続画像で構成っされる画像フレーム群毎に算出した状態変化量の差分を算出して算出した差分の重心を算出し、更に連続する画像フレーム群の間で算出した重心位置を比較して重心の移動量を特徴量として算出する動きベクトル算出部3と、映像内の人物の存在を判断する人物検出部4と、人物の移動方向を判定する移動方向判定部5とを有し、移動方向判定部5はアダブーストによるカスケード型の強識別器によって構成され、サンプル記憶部5aに記憶された特徴量と算出した個々の領域の特徴量とを比較して人物の移動方向を判定する。
(もっと読む)
画像処理システム、画像処理システムを備えた車両、画像処理方法及びプログラム
【課題】低い消費電力や、安全性の向上を実現できるとともに、異物検出用のフレームの挿入によるセンシング用のフレームレートの低下を抑えることが可能な画像処理システム、画像処理システムを備えた車両、画像処理方法及びプログラムを提供する。
【解決手段】フロントガラス105に向けて光を照射する光源202と、フロントガラス105に付着した雨滴203によって反射された光源202からの光、及び、車両外部からフロントガラス105を透過した光を撮像する撮像装置201と、撮像装置201で撮像された撮像画像データを解析する画像解析ユニット102と、を備え、撮像画像データは、雨滴検出用のフレーム及び車両周辺情報検出用のフレームからなり、画像解析ユニット102は、撮像装置201における雨滴検出用のフレームの読み出し規則を、車両周辺情報検出用のフレームの読み出し規則と異ならせる。
(もっと読む)
横断歩道検出装置
【課題】制御系の演算処理に対する負荷を軽減しつつ、車両と共に移動する車載のカメラによる撮影画像から精度良く横断歩道を検出すること。
【解決手段】車両に搭載したカメラ60からの撮影画像の画像認識領域の部分をマイコン30でエッジ処理し、エッジ処理した画像信号を画像認識LSI51で高速フーリエ逆変換して、強周期性を有するゼブラパターンを画像認識領域中から抽出する。抽出したゼブラパターンの周期性が横断歩道の周期性の範囲内であれば、そのゼブラパターンを横断歩道であるとマイコン30が認識する。
(もっと読む)
監視システムおよび撮像装置
【課題】プライバシ保護範囲のマスク処理を実行するにあたって、撮像装置の処理負荷を低減するとともにコストの低減を図る。
【解決手段】撮像装置10は、信号生成部13において、映像信号a1に、パンチルト角度情報を示す信号a4およびf値情報を示す信号a5を重畳させて、重畳信号a2を記録装置20に出力する。記録装置20は、コントローラ30から、マスク設定位置の情報(a8)や操作信号(a12)を含む信号a6を受信するとともに、受信した重畳信号a2から映像信号a7、f値およびパンチルト角度を分離して、f値およびパンチルト角度を用いてマスク画像を生成し、映像信号a7に上書きすることにより、マスク処理済画像を示す信号a11を生成する。
(もっと読む)
周辺監視装置
【課題】運転者のニーズを見越して周辺映像を適切に表示可能な周辺監視装置を提供する。
【解決手段】周辺監視カメラ11により撮影された周辺映像を表示する装置であって、周辺映像を表示する表示装置15と、運転操作の意図を検知する検知部21と、運転操作の実施を判定する判定部22と、運転操作の意図が検知されると、周辺映像を縮小表示し、運転操作が開始されると、周辺映像を拡大表示し、運転操作が収束すると、周辺映像の表示を終了するように、表示装置15を制御する表示制御部23とを備える。よって、運転操作の開始前に周辺映像の表示を開始し、運転操作の終了前に周辺映像の表示を終了するので、運転者のニーズを見越して周辺映像を適切に表示することができる。
(もっと読む)
会話映像表示システム
【課題】視聴者が会話人物の視線方向を分かりやすく、会話人物の存在感を感じられる会話映像表示システムを提供する。
【解決手段】会話画像及び会話の各人物の頭部姿勢データを処理して会話状況を映像表示するシステムであり、各人物の位置と対応して配置された複数のスクリーン403と、各スクリーン403に各人物毎の画像を投影する映像投影装置401と、スクリーン403の姿勢を制御するアクチュエータ402と、スクリーン403の姿勢を、それに投影される画像中の人物の頭部姿勢と同期して変化させるべく、頭部姿勢データからアクチュエータ402の制御信号を生成する制御信号生成手段303と、画像上における各人物の顔領域を検出する顔位置検出手段301と、画像中の検出された顔領域を中心とした領域を、その人物の画像が投影されるスクリーン403の姿勢に応じて写像して映像投影装置401に出力する画像写像生成手段302を有する。
(もっと読む)
電子内視鏡システム
【課題】操作性が良好かつコンパクトで、複数の観察者が同時に観察画像を視認でき、内視鏡術中に音声情報及び/又は文字情報を加えた電子カルテをリアルタイムで作成できる電子内視鏡システムを得る。
【解決手段】電子内視鏡システムは、観察対象物の観察画像を撮像する撮像部(132)を有する電子内視鏡(100)と;電子内視鏡に対して音声情報及び/又は文字情報を入力可能な入力手段(112、203、301、402、700、710)と;電子内視鏡とは別体で、表示部(208、303)を有する外部機器(200、300)と;を備え、電子内視鏡は、撮像部が撮像した観察画像と、入力手段が入力した音声情報及び/又は文字情報とを含む電子カルテデータを生成する生成部(111)と;生成部が生成した電子カルテデータを保持する保持部(117)と;保持部が保持する電子カルテデータを外部機器に無線送信する無線送信部(118)と;を有する。
(もっと読む)
車両周辺監視装置
【課題】 車両に搭載された赤外線カメラにより撮像した画像から監視しようとする対象物を認識し、認識した対象物を車両の運転者に提供する車両周辺監視装置の処理負荷を軽減する。
【解決手段】認識処理部102は、画像に含まれる複数種別の物体(車両、人工構造物、又は歩行者等の対象物)毎に個別認識処理{車両形状認識処理(ステップS13)、人工構造物形状認識処理(ステップS19)、対象物認識処理(ステップS25)}を実行する。除外継続時間設定部106は、前記個別認識処理の結果、認識された物体の画像領域に対して、前記物体の種別に応じて、前記認識処理の効果を継続する除外継続時間T1、T2、T3を設定する。除外継続時間T1、T2、T3が設定された前記画像領域については、解除残時間T1′、T2′、T3′となるまで、当該物体の個別認識処理を行わないようにしたので、処理負荷を軽減することができる。
(もっと読む)
内視鏡装置、内視鏡装置の制御方法、およびプログラム
【課題】計測精度の低下を低減することができる内視鏡装置、内視鏡装置の制御方法、およびプログラムを提供する。
【解決手段】先端部21は、光学系によって領域S1に結像される2つの像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部25と、領域S1に結像された第1の像に基づく第1画像および領域S1に結像された第2の像に基づく第2画像を生成する撮像素子22とを有する。制御部30は、撮像素子22に複数枚の第1画像を生成させると共に、複数枚の第1画像に基づいて、ぶれの有無を判定した後、撮像素子22に第2画像を生成させる。続いて、制御部30は、撮像素子22に第1画像を生成させると共に、第2画像の生成の前および後に生成された第1画像に基づいて、ぶれの有無を判定する。制御部30は、2回のぶれの有無の判定で、ぶれがないと判定した場合に、計測部31に計測を行わせる。
(もっと読む)
マーカの検出および追跡装置
【課題】カメラからマーカまでの距離が近傍から遠方までの広範囲に変化した場合においても、画像処理によりマーカを検出し、そのマーカを追跡する装置を提供する。
【解決手段】マーカとしては、赤外光を反射する反射シート1を下地として、マーカ模様2a,2bを印刷した透明シート2を下地に貼り付けて構成するか、又は、マーカ模様の切り抜きを反射シート1に直接貼り付けて構成し、撮影部としては、マーカを撮影するカメラの前に赤外線透過フィルタを設置すると共にカメラの近傍に赤外線照明手段を設置してなり、演算処理部としては、近距離のときにはカメラにより撮影された入力画像の画像特徴量によりマーカを検出する画像特徴量方法と、遠距離においてはカメラにより撮影された入力画像の赤外光を基にマーカを追跡する赤外光方法とを切り替えて適用する演算処理を行う。
(もっと読む)
運転支援システム、運転支援方法、及び、プログラム
【課題】比較的軽い処理で運転者の支援を行う運転支援システムを提供する。
【解決手段】 運転支援システム1は、動領域抽出によって、領域分割(撮影画像を画像要素に分割する処理)と、視差情報の抽出(視差マップの生成処理)とを行うため、ブロックマッチングを用いる方法に比べて、処理負荷を抑えることができる。また、右画像と左画像の同一画像要素を特定し、視差を算出する場合には、精細なカメラの校正と画像の補正が必要であるが、本運転支援システム1では、これらは不要である。さらに、本運転支援システム1によれば、動きや形の変化を推定するため、他の移動体に相当する画像要素の多様な動きや、形の変化にも対応できる。
(もっと読む)
監視装置
【課題】 予め指定された状態にある監視手段の状況を容易に確認することができ、監視物件の地図と監視領域の平面図との間での表示切替が行われたときに、利用者が指定した状態を引き継ぐことのできる監視装置を提供する。
【解決手段】 監視装置4では、監視区画の表示(エリアマップの表示)をする第一表示工程と、監視区画が選択されたときに当該選択された監視区画に含まれる監視領域の表示(フロアマップの表示)をする第二表示工程と、第二表示工程による表示から第一表示工程による表示へと表示の切替えを行う第三表示工程が行われる。利用者は、監視手段(監視カメラ2)の監視すべき状態として、一または複数の状態(第一集約条件および第二集約条件)を指定可能である。第二表示工程による表示において第二の集約条件が変更された場合には、第一表示工程による表示のための第一の集約条件を当該変更された集約条件に更新する。
(もっと読む)
画像信号処理装置
【課題】対象物の動き検出の誤判定を抑制する画像信号処理装置を提供する。
【解決手段】画像情報抽出部2が抽出した輝度平均値を参照し、現フレームの画像ブロックの輝度平均値と、現フレームの画像ブロックと同一地点に位置する参照フレームの画像ブロックの輝度平均値との差分が閾値以上であった場合に、現フレームの画像ブロックと参照フレームの画像ブロックとの間で輝度変化が発生したと判定すると共に、画像データの明るさの変化による輝度変化の変化量を差し引くためのオフセット値を算出するオフセット算出部3と、該オフセット値を考慮して、現フレームの画像ブロックの画素値と、現フレームの画像ブロックと同位置の参照フレームの画像ブロックの画素値との差分が閾値以上であるか判定を行い閾値以上であった場合に、当該画像ブロック内に動きを有する対象物が存在すると検出する動き検出判定部4とを備える。
(もっと読む)
監視装置
【課題】 効率的に異常の確認を行うことのできる監視装置を提供する。
【解決手段】 監視装置4は、監視手段(監視カメラ2や画像記録装置3)が設置された複数の監視領域における異常状態を遠隔から監視する。監視装置4には、異常が検知された監視手段の識別情報と、異常検知時刻及び異常種別を示す異常情報と、異常情報の確認フラグと、を対応付けた異常管理テーブルが記憶されている。監視装置4は、操作部9から確認操作入力があったときに、記憶部12の異常管理テーブルから未確認の異常情報を抽出し、未確認の異常が生じている一の監視手段についての全ての未確認の異常情報を表示部8に表示する。そして、操作部9からの確認操作入力に基づいて、表示された未確認の異常情報の確認フラグを未確認から確認済みへと変更する。
(もっと読む)
監視装置
【課題】 予め設定された特定状態(例えば、異常発生中状態)にある監視手段の状況を容易に確認することのできる監視装置を提供する。
【解決手段】 監視装置4は、監視手段(監視カメラ2や画像記録装置3)が設置された複数の監視領域を含む監視区画を遠隔から監視する。この監視装置4では、監視区画を表示する第一表示工程と、第一表示工程で表示された監視区画が選択されたときに当該選択された監視区画に含まれる監視領域を表示する第二表示工程と、第二表示工程で表示された監視領域が選択されたときに当該監視領域の平面図を表示する第三表示工程とが実行される。第二表示工程では、選択された監視区画内に特定状態の監視手段がある場合には、当該監視手段が設置された監視領域のみが選択可能に表示され、選択された監視区画内に特定状態の監視手段がない場合には、全ての監視領域が選択可能に表示される。
(もっと読む)
1 - 20 / 2,156
[ Back to top ]