
Fターム[5C054ED11]の内容
閉回路テレビジョンシステム (47,623) | 輝度信号処理 (408) | 補正処理 (154)
Fターム[5C054ED11]の下位に属するFターム
Fターム[5C054ED11]に分類される特許
1 - 20 / 78
独立成分選択を介したソース・ビデオ・データのフィルタリング
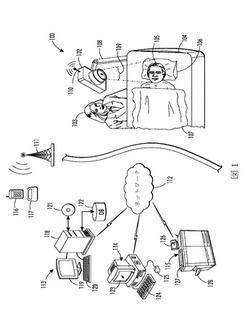
【課題】選択された信号成分が強調されるようにビデオ信号を再構築するためのシステムと方法を提供する。
【解決手段】選択のためにソース・ビデオ・データをその独立信号成分に減少させるための方法と、選択された成分が、ビデオ再生の間に、強調されるように、再構築される方法と、技術者が、例えば、患者の生体信号の優勢領域を視覚的に検査するために、再構築されたビデオを使用することが出来るように、元々のビデオをフィルタリングする方法を含む。
(もっと読む)
画像処理方法及び画像処理装置

【課題】オートアイリスによる背景画像からの現画像の輝度変化量を基に作成した輝度補正値に基づいて現画像を輝度毎に補正するときに、背景領域に侵入した異物に起因する適正でない輝度補正値を除去する。
【解決手段】画像処理装置は、まず背景画像の各輝度について、現画像との輝度差分値の度数を算出する(図3A)。次に背景画像の各輝度の画素数と各輝度の現画像との差分値の合計を用いて背景画像の各輝度の現画像との輝度差分の平均値を算出し、この平均値を基に、仮の補正テーブルを作成する(図3B)。次に近似関数及び係数を設定し、関数に仮の補正テーブルの輝度値及び輝度補正値を代入し、係数を未知数とした方程式を解いて係数を求める。求めた係数と近似関数を用いて、補正テーブルを作成する(図3C)。
(もっと読む)
撮影表示制御システム
【課題】可視光および近赤外光の信号を用いた輝度の計算方法を切り替えることのできる撮影表示制御システムにおいて、車両の走行シーンに応じた適切な切り替えを行えるようにする。
【解決手段】撮像素子22が受光した可視光および近赤外光の強度に基づいて、各画素の輝度を算出する信号処理部23と、信号処理部23が算出した各画素の輝度に基づいた画像をディスプレイ9に表示させる画像認識部8と、を備え、画像認識部8は、可視光に基づく映像信号を出力するカメラ3から受けた映像信号に基づいて、近赤外光を強く反射または放出する被写体としてあらかじめ設定された被写体を画像認識によって探索し、探索の結果近赤外光を強く反射または放出する被写体が見つからなかった場合は、第1の算出方法で各画素の輝度を算出し、見つかった場合は第1の方法よりも輝度に対する近赤外光の強度の寄与が低くなるような第2の算出方法で各画素の輝度を算出する。
(もっと読む)
画像処理装置、画像処理システム、画像処理方法、及び記憶媒体
【課題】階調変換等の画像処理に用いる特徴量を抽出する領域(注目領域)を安定して適切に抽出する構成とすることで、良好な処理後画像を提供できる画像読取装置を提供する。
【解決手段】領域抽出手段112において、輪郭取得手段113は、第2の領域(す抜け領域)を抽出し、その第2の領域(す抜け領域)から当該第2の領域(す抜け領域)でない領域との境界を被写体の輪郭線として抽出する。解析手段114は、輪郭取得手段113により抽出された輪郭線の曲率等を解析する。この解析結果に基づいて、第1の領域(注目領域)を抽出する。
(もっと読む)
監視カメラ映像配信システムと監視カメラ映像配信装置
【課題】本発明は、監視カメラ映像配信システムと監視カメラ映像配信装置に関するもので、サービス性を向上することを目的とする。
【解決手段】この目的を達成するために本発明は、監視カメラ2で撮影した映像を、その中心部の配信領域5と、この配信領域5外周の内方近傍、または外方近傍の色変化検出領域8とに分け、前記色変化検出領域8の色変化が所定値以上になったことを検出すると、前記配信領域5の解像度を低下させる構成とした。
(もっと読む)
映像処理回路および映像表示装置
【課題】直射日光を受けつつも表示映像の視認性を確保する必要性の高い場面において、確実に視認性を確保すること。
【解決手段】パラメータ取得部が、補正前映像の映像種別に応じた直射補正情報を取得したうえで、直射補正部およびブレンド部に対してパラメータとして通知し、直射補正部が、かかるパラメータを用いて補正前映像を補正し、ブレンド部が、かかるパラメータを用いて補正後映像と補正前映像とを合成するように映像処理回路を構成する。
(もっと読む)
画像処理装置、電子内視鏡用プロセッサ装置、画像処理方法
【課題】内視鏡画像の色以外の情報に基づいて、内視鏡画像の各部における病変部である可能性を評価する。
【解決手段】ステップS100において、各画素のRGB信号から画素値Gと画素値Rの比G/Rを求め、血液の吸収帯に関わる色情報から対象画素が病変部である可能性を評価する。これに並行して、ステップS102において、画像の輝度信号から、所定空間周波数領域の輝度信号を抽出する。ステップS104において、脳回転状の模様など、腸管等における表面構造に関わる情報を抽出された輝度信号に基づき判定し、対象画素が病変部である可能性を評価する。ステップS100、ステップS104の評価に基づき、ステップS106において総合的に対象画素が病変部である可能性について評価し、該評価に基づき各部分の危険度を示す画像を生成する。
(もっと読む)
車両周辺監視装置
【課題】カメラの取り付け位置に応じて、カメラ毎に最適な視野と解像度の領域設定を行うこと。
【解決手段】複数のカメラ1〜4は、それぞれ広角レンズ11〜41と撮像素子12〜42と信号処理部13〜43を有する。画像処理部5は、複数のカメラが出力する複数の撮影画像14〜44に対し画像処理を行い、モニタ6へ表示する。複数のカメラから出力され画像処理部5で処理される複数の撮影画像のうち少なくとも1つの撮影画像24は、広角レンズ21のレンズ歪みの中心Pが撮影画像24の中心Qから所定量d’だけ変位するように設定する。
(もっと読む)
電子内視鏡及び電子内視鏡システム
【課題】シリアル伝送により画像信号を伝送しつつ画像信号の劣化を防止する。
【解決手段】撮像素子と、撮像素子からの信号をサンプルホールドするサンプルホールド回路と、サンプルホールド回路からの信号を伝送するシリアルケーブルと、シリアルケーブルにより伝送された信号に対して帯域補正処理を行う帯域補正部とを有する電子内視鏡を提供する。
(もっと読む)
駐車支援装置
【課題】複数のカメラからの撮影画像間における色合いの違いを、車両に取り付けるカラーリファレンス部材などを必要とせずに、簡単な方法で補正できる駐車支援装置を提供する。
【解決手段】自車周辺をそれぞれ異なる撮影視野で撮影する複数のカメラによる撮影画像から白色系道路標示などの特定の道路標示を抽出し、撮影画像から抽出された特定の道路標示に基づいて当該撮影画像に対してホワイトバランスなどの画像補正を施して補正撮影画像を生成する。生成された補正撮影画像から視点変換を通じて生成されたカメラ毎の俯瞰画像セグメントを合成して、モニタに表示する自車周辺の表示画像としての俯瞰画像が生成される。
(もっと読む)
画像処理装置および画像処理方法、プログラム
【課題】監視のために必要な監視目標物の情報を失うことなく、画像のファイルサイズを極力削減できるようにする。
【解決手段】撮影するフレーム内の複数の点において、被写体と撮影レンズとの距離を測定する距離測定手段と、測定された前記被写体と前記撮影レンズとの距離に応じて、該距離が近いほど平滑化フィルタ処理を行う強度を強く設定する設定手段と、撮影画像の所定のエリアに対して設定された前記強度で平滑化フィルタ処理を行うフィルタ処理手段と、を設けることにより、監視目標物の情報を確保すること、及び画像のファイルサイズを削減することの両方を可能にする。
(もっと読む)
インターホン装置
【課題】厳しい逆光環境においても来訪者の顔を的確に視認することができるインターホン装置を提供する。
【解決手段】玄関子機10のカメラ14に、その下方部分を覆うような樹脂ケース31を取り付ける。これにより、カメラ14により撮像された撮像画像に常に黒い画像部分が含まれるので、居住者が逆光補正ボタン24を押下した場合、補正領域分割パターンを使用することによって黒い画像部分をその一部に含んだ領域を重み値が最も大きい領域として露出補正を実行することができるため、厳しい逆光環境においても来訪者の顔を視認することができる。
(もっと読む)
電子内視鏡システム及び血管情報取得方法
【課題】酸素飽和度を含む複数の血管情報を同時に取得する。
【解決手段】互いに波長領域が異なる第1〜第3狭帯域光が、第1〜第3狭帯域光源33〜35から体腔内に照射される。第1〜第3狭帯域光の少なくとも1つは中心波長が450nm以下である。第1及び第3狭帯域光間の第1光量比と、第2及び第3狭帯域光間の第2光量比とは、光量比モニタリング部41でモニタリングされる。光量制御部42は、第1及び第2光量比が標準状態時の光量比となるように、各狭帯域光源33〜35を制御する。各狭帯域光の照射毎に撮像が行なわれることにより、第1〜第3狭帯域画像データが得られる。第1及び第3狭帯域画像データ間の第1輝度比と、第2及び第3狭帯域画像データ間の第2輝度比とから、血管深さ情報及び酸素飽和度情報を同時取得する。
(もっと読む)
電子内視鏡システム及び血管情報取得方法
【課題】酸素飽和度を含む複数の血管情報を同時に取得する。
【解決手段】互いに波長領域が異なる第1〜第3狭帯域光が、第1〜第3狭帯域光源33〜35から体腔内に照射される。第1〜第3狭帯域光の少なくとも1つは中心波長が450nm以下である。第1〜第3狭帯域光の光量は、モニタリング部41でモニタリングされる。各狭帯域光の照射毎に撮像が行なわれることにより、第1〜第3狭帯域撮像信号が得られる。これら第1〜第3狭帯域撮像信号は、モニタリング部41でモニタリングした第1〜第3狭帯域光の光量に基づき、補正処理が行われる。補正後の第1及び第3狭帯域撮像信号間の第1輝度比と、補正後の第2及び第3狭帯域撮像信号間の第2輝度比とから、血管深さ情報及び酸素飽和度情報を同時取得する。
(もっと読む)
画像変換装置及び画像変換システム
【課題】撮像手段から入力された映像データを記憶媒体に一旦全て保存することなく複数の変換結果を出力することが可能な画像変換を可能とする手段を提供することにある。
【解決手段】複数のラインを持つ単一のラインメモリ1003を映像変換手段による読み出し用途と、撮像手段からの画像データの入力用途に役割を入れ替えながら使用する。画像変換手段は、ラインメモリ1003上の入力画像を取得し命令デコーダ1006によって解釈された変換指定手段1009に基づき入力画像の変換を行う。
(もっと読む)
監視システム
【課題】見やすいフロア図面との合成映像を表示する監視システムを提供することを目的とする。
【解決手段】フロアの監視領域に設けられた一又は複数の監視カメラと、監視カメラにより撮影された画像をフロアの画像に合成して合成画像を生成する画像処理装置と、画像処理装置で生成された合成画像を表示する画像表示装置とを備えた監視システムであって、画像処理装置は、監視カメラの撮影領域に関する位置情報と、フロアの画像及び監視カメラの撮影領域を遮るフロアの構造物に関する位置情報を含むフロアに関する情報とが記憶された位置情報記憶部と、監視カメラの撮影領域に関する位置情報と、監視カメラのフロアに関する情報とに基づいて監視カメラによる撮影画像をフロア画像に合成する合成領域を定める合成領域生成部と、監視カメラによる撮影画像を合成領域に合成して合成画像を生成する画像合成部を有することを特徴とする。
(もっと読む)
運転支援装置
【課題】本発明は、車両が旋回しながら後退する場合に、運転者の違和感をなくすとともに、旋回方向の画像を表示して運転者に安心感を与えることを目的としている。
【解決手段】このため、後方撮像手段と、後退判定手段と、表示手段と、後方画像から歪み補正して表示画像を作成する画像作成手段とを備える運転支援装置において、旋回角度検出手段と、旋回角度に基づいて遅延時間経過後の車両位置を推定する車両位置推定手段と、推定位置に仮想カメラを設定する仮想カメラ設定手段を備え、画像作成手段は、仮想カメラが視点となるように撮像画像を変換する。また、運転支援装置において、旋回角度検出手段と、車速検出手段と、旋回角度と車速に応じた仮想カメラと真カメラの画像の画素位置の対応関係を示すデータベースを備え、画像作成手段は、旋回角度と車速とに応じてデータベースを参照して仮想カメラが視点となるように撮像画像を変換する。
(もっと読む)
車両周辺映像表示装置
【課題】一部の撮像画像に影が含まれていることによる合成画像全体の輝度低下を防ぐことができる車両周辺映像表示装置を提供する。
【解決手段】車両周辺を撮像する各カメラ1a〜1dによる複数の撮像画像に基づいて生成された単一の合成画像に影が含まれているか否かを判定し、影が含まれていると判定した場合には合成画像を構成する複数の撮像画像の中から影が含まれている画像を特定する影判定部15と、影判定部15が影が含まれている画像を特定した場合、影が含まれている画像を除いた残りの撮像画像の平均輝度に基づいて撮像画像毎の輝度を調整する調整部5a〜5dと、輝度の調整が行われた後の撮像画像に基づいて生成された合成画像を表示する表示手段3と、を有する。
(もっと読む)
テレビドアホンシステム
【課題】子機のカメラにて撮像される被写体の映像信号について、逆光状態においても変化していく太陽光等の光源位置を算出し、この映像信号に発生するゴースト、フレア、ハレーション等の光学的な有害因子を補正することにより、親機のモニタに出画される映像信号の視認性を向上させる。
【解決手段】子機1aのカメラ10にて撮像される被写体の映像信号について、その画素毎の輝度情報より定義される光源3の位置と輝度情報の変化量から、親機2aの補正制御部24を構成する補正パターン判定回路242にて最適な補正パターンを算出することにより、この補正パターン判定回路242にて判別される補正パターンを補正パターン記憶部23から読み出し、補正処理部22にて映像信号を補正する。
(もっと読む)
物体検出装置、物体検出方法及び物体検出プログラム
【課題】物体(人物)が比較的長い期間静止している場合でも、物体が背景モデルに同化することを抑制し、正確な物体の数の計数を可能とする。
【解決手段】物体検出処理部3では、固定カメラ1で撮影された入力画像と背景モデルとを、複数の画素からなるブロックに分割し、各ブロック毎に物体の輪郭に対応する物体領域を抽出する。また、この輪郭部分の内側の領域を埋めるように膨張処理を行うとともに、この膨張処理による物体領域の過剰検出を抑制する収縮処理を行う。荷重値テーブル生成部5は、物体の数に対する各画素の寄与率を表す荷重値を求めて荷重値テーブルを生成する。物体計数部6は、物体領域中の画素の荷重値を積算して物体の数を計数する。
(もっと読む)
1 - 20 / 78
[ Back to top ]