
Fターム[5C054FC05]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 輝度解析 (433) | N値化処理 (104)
Fターム[5C054FC05]に分類される特許
1 - 20 / 104
俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置
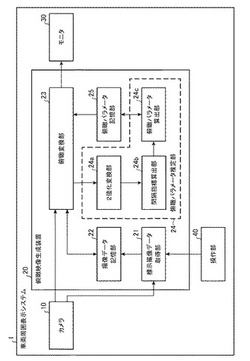
【課題】撮像画像を俯瞰画像に変換する変換パラメータを簡易に調整できる俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置を提供する。
【解決手段】俯瞰変換部23が、画像を射影変換により俯瞰画像に変換する俯瞰パラメータを記憶する俯瞰パラメータ記憶部25から読み出した俯瞰パラメータを用いて、カメラ10により撮像された撮像画像を俯瞰画像に変換し、間隔指標算出部24bが、等間隔のパターンの標示が撮像された撮像画像を変換した俯瞰画像上で標示のパターンの間隔が揃う度合を示す間隔指標値を算出し、俯瞰パラメータ算出部24cが、算出された間隔指標値に基づいて、俯瞰画像上で標示のパターンの間隔が所定の範囲内で揃う俯瞰パラメータを算出して俯瞰パラメータ記憶部25に記憶する。
(もっと読む)
物体検出装置を搭載する移動体

【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60は、ショベル60の動作状態を検出する動作状態検出部65と物体検出装置100とを備える。物体検出装置100は、複数のカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。また、物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60の動作状態に応じて配置される。
(もっと読む)
物体検出方法及び物体検出装置
【課題】演算コストがより低い物体検出装置を提供すること。
【解決手段】2つのカメラ2a、2bのそれぞれが撮像するカメラ画像2aR、2bRの視差に基づいて物体50を検出する物体検出装置100は、被撮像空間を通る仮想直線VL上の複数の検査点IP1〜IP5のうちの1つIP1に対応する画素を含む部分画像2aR1、2bR1をカメラ画像2aR、2bRから抽出する部分画像抽出部10と、同一の検査点IP1に対応するカメラ画像2aR、2bRの部分画像2aR1、2bR1同士の類似度に基づいて検査点IP1に関する評価値CGRAを決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体50の存否を判定する物体存否判定部12とを備える。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60に搭載される物体検出装置100は、2つのカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60が動いたときにショベル60の一部が到達可能な空間領域を通る。
(もっと読む)
偏光画像による車両位置検知方法及びシステム
【課題】偏光画像による車両位置検知方法及びシステムを提供する。
【解決手段】かかる方法は、偏光カメラにより路面の偏光画像を取得する段階と、取得された前記偏光画像中の路面及び路肩の違いに基づいて、前記偏光画像中の路肩を算出し、算出された路肩間の部分を路面部分と決定する段階と、前記偏光画像における車両の車輪の画素値と実際の路面の画素値との顕著な差に基づいて、決定された前記路面部分における少なくとも一つ以上の推定車両底部を識別する段階と、識別された前記推定車両底部の各々に対し、前記偏光画像における車両の輪郭の画素値と背景の画素値との差に基づいて、対応する推定車両底部による推定車両位置を取得する段階を含む。
(もっと読む)
画像監視装置
【課題】被害者が強盗に手を縛られる身柄拘束行為を検出し、通報する画像監視装置を提供する。
【解決手段】本発明にかかる画像監視装置は、撮像部により取得された入力画像に、強盗と被害者に対応した人物領域を抽出する人物領域抽出手段と、人物領域のうち強盗犯と被害者に挟まれ、両者の腕が伸びている部分を接触領域として抽出する接触領域抽出手段と、接触領域における画素値の時間変化から、身柄拘束行為を判定する異常判定手段を有する。
(もっと読む)
電子内視鏡用プロセッサ
【課題】患部の識別が容易となるように所定の領域のみに凹部強調の為等の所定の画像処理が行われた内視鏡画像を得ることが可能な電子内視鏡用プロセッサを提供する。
【解決手段】電子内視鏡用プロセッサは、内視鏡画像中の領域の指定を受け付ける入力手段と、内視鏡画像の少なくとも一部の領域に画像処理を行う画像処理手段とを有し、内視鏡画像の、前記入力手段を介して指定された領域内のみに、画像処理手段による所定の画像処理が行われることを特徴とする。
(もっと読む)
情報処理装置、3次元位置算出方法及びプログラム
【課題】被写体の3次元位置を高速、かつ、安定的に算出する。
【解決手段】少なくとも2つの異なる視点から被写体150を撮像する撮像装置100、110で撮像された被写体150の各画像の色情報に基づいて各画像を複数の領域に分割する領域分割手段と、各画像上に設定された走査線と、領域分割手段で分割された各画像の領域の境界線と、の交点の近傍の領域に基づいて、交点の特徴量を算出する交点特徴量算出手段と、交点特徴量算出手段で算出された交点の特徴量に基づいて各画像の間の対応点を求める対応付け手段3000と、対応付け手段で求められた対応点の視点に対する3次元位置を算出する3次元位置算出手段4000と、を有する。
(もっと読む)
車両の周辺監視装置
【課題】車両周辺の移動物体の検出精度を向上させた車両の周辺監視装置を提供する。
【解決手段】車両の周辺の物体の位置および速度ベクトルを検出する物体検出手段と、車両の周辺の画像を取得する撮像手段と、撮像手段により取得されたグレースケール画像を多値化する多値化手段と、物体位置検出手段が特定した物体の位置に対応する取得されたグレースケール画像に、当該物体の位置の各々に対応する所定サイズの領域を設定する領域設定手段と、領域毎に、対応する物体の速度ベクトルの大きさに応じて、対応するグレースケール画像を多値化する際のしきい値を設定する多値化しきい値設定手段と、多値化手段により対応する多値化しきい値を用いて多値化された画像に基づいて、所定の対象物の有無を判定する判定手段と、を備える。
(もっと読む)
煙検出装置
【課題】監視可能範囲を限定することなく、照明変化による誤検出を抑えた煙検出装置を得る。
【解決手段】煙特徴量算出手段(30)と、記憶部(20)と、領域別感度設定手段(40)と、煙判定手段(50)とを備え、監視カメラ(1)により撮像された画像内に設定された複数の領域のそれぞれに対して、照明変化に起因する輝度変化を照明変化情報として抽出し、照明変化情報が所定の照明変化検出範囲内にある場合には、照明変化が発生していると判断する照明変化検出手段(60)をさらに備え、煙判定手段(50)は、照明変化が発生していると判断された領域では、記憶部に記憶されている複数の所定の基準判定値の中から1つの基準判定値を取り出す際に、領域別感度設定手段により設定された所望の検出感度よりも低い検出感度となる基準判定値を取り出し、所望の検出感度よりも低い検出感度で煙の発生を検出する。
(もっと読む)
監視カメラ
【課題】監視領域の画像の輝度値と照度を比較して妨害行為を検知する手法の信頼性を向上させた監視カメラを提供する。
【解決手段】監視カメラ1aは、ハウジング5に設けられた撮像素子7と、ハウジングの撮像部と異なる面に設けられた受光部12aと、受光部内に設けられて照度を検出する照度センサ11と、撮像素子の画像と照度センサの照度から妨害行為を判定する妨害判定部15を有する。受光部から見て撮像方向となる側に隣接して庇部13aが設けられているので、周辺ノイズ光を庇部で遮光して受光部に入らないようにできるため、誤報を防止し、妨害行為の検知精度が向上する。
(もっと読む)
画像監視装置および監視システム
【課題】 監視領域において物品の置き去りと持ち去りのどちらが発生したのかを判別することのできる画像監視装置を提供する。
【解決手段】 画像監視装置2は、監視カメラ3で監視領域を撮影した画像に基づいて、監視領域における物品の置き去りまたは持ち去りを検出する。この場合、まず、監視領域を撮影した画像(入力画像)と、予め監視領域を撮影した画像(基準画像)の差分から、入力画像に含まれる変動領域を抽出する。そして、入力画像の変動領域や基準画像の対応領域の内外で連続する線分(特定線分)を抽出し、特定線分が入力画像と基準画像のいずれの画像で検出できたのかに基づいて、監視領域において物品の置き去りと持ち去りのどちらが発生したのかを判定する。
(もっと読む)
車両の周辺監視装置
【課題】危険性の度合いについて運転者の速やかな認識を可能にしつつ、視界の状態にかかわらず、表示装置上の映像に依存せずに直接的な前方の目視を運転者に促すような表示を行う手法を提供する。
【解決手段】撮像装置によって取得された画像に基づいて、車両の周辺の所定の対象物を検出し、該撮像画像に基づいて生成される表示画像を、車両の乗員が視認可能なように表示装置上に表示するとともに、対象物が該車両に対して所定の位置関係にある場合に、該表示画像上の該対象物を強調的に表示する。さらに、車両の周辺の視界状態を推定する。視界状態が良好と推定された場合には、表示画像上で、車両から所定距離の位置に第1の強調表示を表示し、視界状態が良好ではないと推定された場合、視界状態が良好と推定された場合に比べ、該第1の強調表示を、車両側に近づけて表示する。
(もっと読む)
車両の周辺監視装置
【課題】車両の周辺の対象物を確実に抽出して、速やかに運転者に知らせることが可能な車両の周辺監視装置を提供する。
【解決手段】周辺監視装置は、車両に搭載され、該車両の周辺の物体の位置を特定する物体位置特定手段と、車両に搭載され、該車両の周辺の画像を取得する撮像手段と、撮像手段により取得された画像を多値化する多値化手段と、物体位置検出手段が特定した物体の位置に対応する前記取得された画像に、該物体の位置の各々に対応する所定サイズのマスクを設定するマスク設定手段と、マスク設定手段により設定されたマスク毎に、対応する画像を多値化する際のしきい値を設定する多値化しきい値設定手段と、多値化手段により、対応する多値化しきい値を用いて多値化された画像に基づき所定の対象物の有無を判定する判定手段と、を備える。
(もっと読む)
人物追跡方法、人物追跡装置および人物追跡プログラム
【課題】本発明は、カメラで捉えた人物の動きを追跡する人物追跡方法に関し、カルメンフィルタなどを用いた追跡処理と比べ軽い処理で人物を追跡する。
【解決手段】各フレーム画像上の頭部を検出し、各フレーム画像上に頭部が検出された人物を特徴づける特徴量を、該各フレーム画像ごとおよび各頭部ごとに算出し、過去のフレーム画像上に頭部が検出された各人物の過去のフレーム画像上の各特徴量と、今回のフレーム画像上に頭部が検出された各人物の今回のフレーム画像上の各特徴量との間の、特徴量どうしの一致の程度を表わす関連度を算出し、各関連度のうちの閾値以上の一致の程度を表わす関連度であってかつ最大の一致の程度を表わす関連度の算出の基になった頭部を同一の人物の頭部である旨、判別する。
(もっと読む)
侵入検知装置
【課題】赤外線を利用した侵入者検知装置に関し、必要最低限のシステムにて誤報、失報を低減し、暗視野でも信頼性高く侵入者を検出することができる低価格な侵入者検知装置を提供する。
【解決手段】監視領域の赤外線画像を撮像する赤外線カメラと、赤外線カメラから得られた検出信号が侵入者であるかそうでないかを判定する画像処理部、画像処理部にて侵入者であると判定された場合、検出前後の赤外線画像信号を一定時間記録する記録媒体を備え、また、赤外線画像を撮像する赤外線カメラの赤外線検出器として小さな画素数を有する赤外線検出器を用いることにより、誤報、失報の少ない信頼性の高い侵入者検知装置をより低いコストで提供することが可能となる。
(もっと読む)
監視装置
【課題】平均輝度が大きく変化しないような方法で撮影妨害がなされた場合にも、その妨害行為を検知することができる監視装置を提供する。
【解決手段】映像フレームを構成する画素の各々をその輝度に応じて複数の輝度クラスのうちのいずれか1つに群分けし、クラス毎の画素数と基準値との差分値の合計が閾値を上回ったと判別した場合に妨害検出信号を生成及び出力する。
(もっと読む)
車両の周辺監視装置
【課題】効率的に検出すべき対象物を判定する。
【解決手段】車両に搭載された撮像手段によって得られる撮像画像を用いて車両の周辺を監視する車両周辺監視装置は、検出すべき対象物の所定の種類毎に、該対象物を判定する判定処理が設けられており、車両が走行している位置を検出する手段と、該検出された位置の存在する道路および地域の少なくとも一方に関する特徴を取得する手段と、取得された特徴に基づいて、起動すべき判定処理を選択する選択手段と、撮像画像から抽出された対象物に対し、該選択した判定処理を実行して、該対象物を判定する手段と、を備える。上記特徴は、一実施例では、該位置の存在する道路の種別を表し、他の実施例では、該位置の存在する地域が、所定の条件を満たす街であるか否かを表す。
(もっと読む)
監視装置
【課題】高速目標についても対処可能な監視装置を得る。
【解決手段】アドレス制御信号に基づいて、光学系2により結像された画像の中の所望の画素領域を、選択的に電気信号として読み出し可能な二次元光検出素子3と、視軸制御信号に応じて駆動することで光学系2の指向方位を変更する視軸駆動部8と、二次元光検出素子からの電気信号に基づいて、監視目標の位置および移動方向を含む目標情報を生成する目標探知追尾処理部(5、6、7)と、目標情報に基づいて、次回の画像更新時における最適な読み出し画素の領域を演算するアドレス選択画素演算器11を有し、演算結果をアドレス制御信号として出力する素子制御部(4、11)と、目標情報に基づいて、次回の画像更新時における光学系の最適な指向方位を演算し、視軸制御信号として出力する視軸制御部9とを備える。
(もっと読む)
映像監視システム
【課題】画策を高精度で検出することができる映像監視システムを提供する。
【解決手段】撮像装置によって撮像された画像の特徴量の時間変化を検出する第一の時間変化検出部と、照度センサによって検出された照度の時間変化を検出する第二の時間変化検出部と、検出された特徴量の時間変化および照度の時間変化に基づいて、撮像装置に対する画策を検出する画策判断部とを備える。
(もっと読む)
1 - 20 / 104
[ Back to top ]