
Fターム[5C054FC12]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 関心領域処理 (4,623) | 関心領域の抽出;特定 (2,029)
Fターム[5C054FC12]に分類される特許
2,001 - 2,020 / 2,029
画像における移動物体追跡方法及び装置
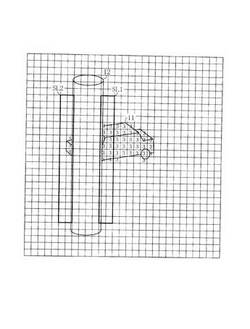
【課題】移動物体を一時的に隠す遮蔽物が存在し又は移動物体の中間部が背景画像と類似していても、1つの移動物体を画像上で1つの移動物体として認識可能にする。
【解決手段】画像のフレーム内に遮蔽物12の一端側及び他端側に沿ってそれぞれスリットSL1及びSL2を予め設定しておき、一方のスリット内で移動物体の一部が検出され、その後他方のスリット内で移動物体の一部が検出された場合に、該一方の移動物体の一部に付与されている識別符号を該他方の移動物体の一部に付与する。
スリットの替わりに遮蔽物領域を設定して、該領域に隠れた移動物体を推定してもよい。遮蔽物の一端及び他端に沿ったスリット画像をそれぞれ該一端及び他端から遮蔽物の内側へ所定回数複写することにより遮蔽物の幅を擬似的に狭く又は0にしてもよい。画像の縮小比が大きい領域ほどブロックサイズを大きくしてもよい。
(もっと読む)
背景画像生成方法及び装置

【課題】移動物体を正確に認識するためのより正確な背景画像を得る。
【解決手段】時系列画像の対応する画素(x,y)について、画素値のヒストグラム26xyを作成し、その最頻値Pm0と更新前の背景画像の対応する画素の値Pbとの差の絶対値が所定値以上であれば、画素値Pbを、更新せずに維持する。移動物体の領域の画素値を除いてヒストグラムを作成してもよい。画像フレーム内にカメラぶれ検出領域を3箇所設定し、フレーム画像と背景画像とを比較して各カメラぶれ検出領域の動きベクトルを求め、該動きベクトルに基づいて、カメラぶれによる画像内各部のシフトを定める座標変換式のパラメータを決定し、該座標変換式に基づいて、該時系列画像に対し該背景画像を相対的に対応させる。
(もっと読む)
生物の眼球運動神経システムに基づいたバイオ型自動視覚と視線制御システム
【課題】本発明は生物の眼球運動制御の原理を用いて、カメラの視覚認識と視線運動制御システムを構築する。
【解決手段】 本発明の基本システムには、眼に相当するものは広角及び望遠レンズ付きの複数のカメラにより構成されたカメラセットであり、各カメラセットは人間の眼球のように3自由度に回転でき、さらに衝動性眼球運動、滑動性眼球運動、前庭動眼反射、視機性反射運動など人間の眼球運動の特徴を有する。すなわち、本発明のシステムは注視する視標の高速切り替え、高精度・高速の視標追従運動、基盤の振動により生じた視線偏差の補償などの機能を備えている。特に本発明の両眼モデルの場合は両眼が人間のように同一視標しか追従できない特徴があり、視標の距離を瞬時に測定することができる。本システムは広範囲の監視と重要箇所の高精度の画像を同時に得られるので、監視、保安、看護など広い領域で応用可能である。さらに、本システムは自身の運動を補償する機能があるので、車、船、飛行機、ロボットなどの運動物体の視覚としても最適である。本システムを玩具やペットロボットの眼の運動制御に応用する場合、その眼球は生き物のように動くので、持ち主には玩具やペットロボットに「魂」が入っているような感覚を与えることができる。 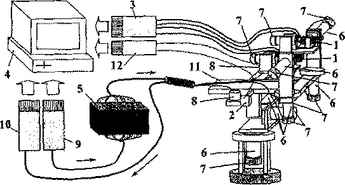 (もっと読む)
(もっと読む)
車両周辺監視装置
【課題】 本発明は、物標以外の物体の影響やノイズの影響を受け難く、良好な物標の認識精度を実現する車両周辺監視装置の提供を目的とする。
【解決手段】 本発明は、車両の所定位置に搭載された撮像手段の撮影画像に対して画像処理を行い、認識対象の静止物体を認識する車両周辺監視装置であって、車両の移動に伴って変化する認識物体の画素位置の移動方向を算出し、該移動方向の算出結果に基づいて、該認識物体が前記認識対象の静止物体であるか否かを判断することを特徴とする。
(もっと読む)
画像処理装置及びロボット装置ならびに車両誘導装置
【課題】
画像処理装置において、広い範囲にある対象物に対して、屋外や強い照明下においても安定して形状復元する。
【解決手段】
画像処理装置において、画像入力手段1aが時系列的に入力した画像上の特徴的な点の位置関係の変化を第1の計算手段1bが抽出する。位置関係の変化から特徴的な点の三次元位置と画像を捉えた際の視点の位置と方向を第2の計算手段1cが計算する。入力した画像と特徴的な点の三次元位置とから画像に捉えられている物体の三次元形状データを第3の計算手段が計算する。
(もっと読む)
自動視覚事象検出の方法と装置
事象の画像を記録し、表示と、人間的または、自動分析のためにそれらを検索し、事象が検出される場合、外部装置へ同期された信号を送るための事象の自動視覚検出のための方法と装置が公開される。事象とは、撮像装置の視野内のある時間変化条件の中でも特定の条件に相当し、それは、事象が起こる二次元の視野のデジタル画像の取得、および分析に基づき視覚手段により検出され得る。事象は、分析のために画像を得ることが望まれる、まれな、短時間の機械の故障に相当する場合がある。事象は、視野の複数の画像の分析から得られた証拠を考慮することにより検出され、その間に機械構成要素の移動が複数の視点から見られ得る。 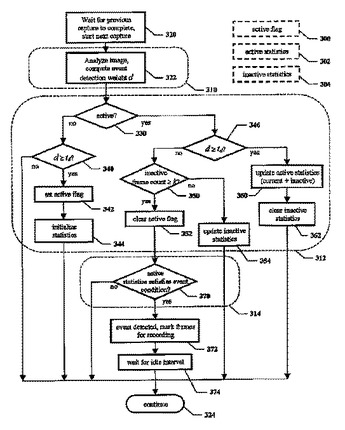 (もっと読む)
(もっと読む)
強化された監視被写体撮像
撮像システム(30)が、被写体位置(46)における被写体(32)に向けてミリ波電磁放射線を送信し、その被写体(32)からミリ波電磁放射線を受信するように構成されたアンテナ装置(48)を含む。コントローラ(62)は、アンテナ装置(48)を操作し、受信された放射線を表す出力(68)を生成するように構成されたトランシーバ(64)と、トランシーバ出力(68)から、被写体(32)の画像(130)を表す画像データを生成するように適合されたプロセッサ(70)とを含む。アンテナ装置(48)によって受信された放射線を表す画像信号の少なくとも第1の部分を使用して、被写体(32)の少なくとも一部分の第1の画像(130)を表す第1の画像データが生成される。第1の画像(130)の解像度とは異なる解像度を有する第2の画像(132)を表す第2の画像データが、画像信号の少なくとも第2の部分から生成される。  (もっと読む)
(もっと読む)
画像中の重要領域の判別
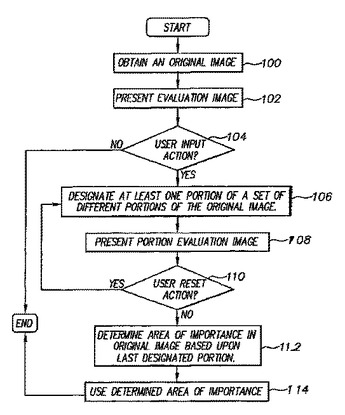
表示装置および表示装置を動作させるための方法が提供される。表示装置は原画像のソースおよびディスプレイを有している。ユーザー入力システムは、ユーザー入力動作に反応して非方向性信号を生成するよう適応されている。コントローラが設けられていて、該非方向性信号を検出し、原画像の諸部分の集合のうちの異なる一つを逐次指定するよう適応されている。コントローラはさらに、ディスプレイをして、原画像の現在指定されている部分を示す部分評価画像を呈示させ、現在指定されている部分に基づいて原画像内の重要領域を決定するよう適応されている。原画像の諸部分の集合に含まれる部分のうちの少なくとも一つは、原画像と中心が同じではない。
 (もっと読む)
(もっと読む)
移動物体検出装置及び移動物体検出方法
カメラ(100)からの出力に基づいて、移動物体を示すデータを時間軸に沿って並べた時系列データを生成する時空間データ生成部(120)と、生成された時系列データに基づいて、2本以上の脚を持つ移動物体の移動により発生する脚間の時間変化に関する情報である脚間情報を抽出する脚間情報抽出部(140)と、抽出された脚間情報に含まれる周期性を解析する周期性解析部(150)と、解析された周期性から、移動物体の存否を含む移動情報を生成する移動物体検出部(160)とを備える。 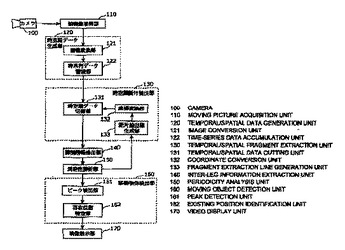 (もっと読む)
(もっと読む)
オーバーヘッドモジュール
【課題】オーバーヘッドモジュールが監視カメラを内蔵する場合でも、車両の室内とオーバーヘッドモジュールとの調和を維持することにある。
【解決手段】制御部によって駆動された駆動部が回転軸4を中心にしてオーバーヘッドモジュール本体2を回転させ、このことにより監視カメラ3の位置を「監視位置」と「非監視位置」との間で切り替える。なお、「監視位置」とは、監視カメラ3が、天井面101またはサンバイザ102などに妨げられずに、運転席側ドアなど車両室内へ侵入可能な場所を監視可能な位置であり、一方、「非監視位置」とは、監視カメラ3が、天井面101またはサンバイザ102などに妨げられて侵入可能な場所を監視不可能な位置である。したがって、オーバーヘッドモジュール1が監視カメラ3を内蔵する場合でも、車両の室内とオーバーヘッドモジュール1との調和を維持することができる。
(もっと読む)
センサ・カメラ連動型侵入検知装置
所定の設定エリア内に不法に侵入した物体Qを誤作動少なく確実に検知できるセンサ・カメラ連動型侵入検知装置を提供する。検知エリアA0〜Anからの検知線の受信量変化により物体Qを検知するセンサ部1と、カメラ2で撮影した特定エリアAC1からの映像信号MSの変化により物体Qを検知する画像処理部4と、カメラ2に接続されたモニタ画面6上で前記特定エリアAC1を設定するエリア設定部3と、前記センサ部1からの検知信号PDと画像処理部4からの検知信号MD1の両方を受けて物体検出信号DE1を発生する検出信号発生部5とを備えている。 (もっと読む)
赤外線カメラ・システムを用いて検査を実施する及び化学物質漏出を検出するためのシステム及び方法
化学物質を中に有する構成要素から発する化学物質(140)の視覚的画像を提供するように適合されたパッシブ赤外線カメラ・システム(22)が開示される。パッシブ赤外線カメラ・システム(22)は、レンズ(38)、冷却される部分(42)、及び冷却システム(60)を含む。冷却される部分(42)は、中に赤外線センサ・デバイス(44)及び光バンドパス・フィルタ(46)を有する。赤外線センサ・デバイス(44)は、レンズ(38)から赤外線画像を取り込むように適合される。光バンドパス・フィルタ(46)は、レンズ(38)と赤外線センサ・デバイス(44)の間の光路に沿って配置される。光バンドパス・フィルタ(46)の通過帯域(80)の少なくとも一部は、化学物質の吸収帯域(例えば、71,72)内にある。冷却システム(60)は、赤外線カメラ・システム(22)の冷却される部分(42)を冷却するように適合される。 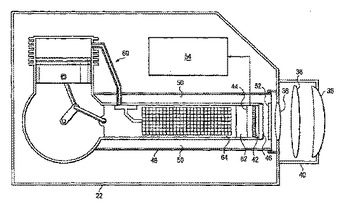 (もっと読む)
(もっと読む)
拡張可能なマルチカメラ分散ビデオ処理および可視化監視システムを提供する方法および装置
実時間マルチカメラ分散ビデオ処理および可視化を実現するための拡張可能なアーキテクチャ。1つの例示的なシステムは、複数の入力ビデオを取り込み記憶するための、少なくとも1つのビデオキャプチャ−記憶システムと、警報状況またはイベントを検出し報告するための、少なくとも1つの視覚ベース警報システムと、理解および応答を迅速化するコンテキストで警報状況を表示するための、少なくとも1つのビデオレンダリングシステム(たとえば、ビデオフラッシュライトシステム)とを備える。このアーキテクチャの1つの利点は、治安部隊の警報状況理解能力を超えることなく、追加のセンサ(たとえば、カメラ、動作センサ、赤外線センサ、化学センサ、生物センサ、温度センサなど)を数多く追加することができるように、それらのシステムがすべて拡張可能なことである。 (もっと読む)
車両の後方確認支援装置
【課題】後方確認の際に障害となる障害物が車室内にある場合でも、表示器を装着することなくリアビューミラーを通して良好な後方確認を行えるようにする。
【解決手段】後方確認支援装置1は、車両の後部座席よりも前方の天井部分に設置された後席用モニタ90の車両前方側面にディスプレイ20が装着され、後席用モニタ90を透過した後方領域をリアビューカメラ部10のリアビューカメラにて撮像してディスプレイ20に表示する。そして、ディスプレイ20にて表示する画像の撮像領域を、運転者の体形や姿勢により応じた後席用モニタ90を透過した後方領域になるように、運転者によるスイッチボックス50の操作により、リアビューカメラ部10のリアビューカメラの向きを変えて変更する。
(もっと読む)
車載撮像システム及び撮像装置
【課題】1台の撮像装置で距離算出用の画像及び表示用の画像の両方を撮像可能にする。
【解決手段】撮像装置2は、広角レンズ6の左右に所要角度で傾けた左鏡7A及び右鏡7Bを配置すると共に、広角レンズ6に対向させて撮像画素部8を設ける。撮像画素部8は中央に広角レンズ6を通過した像が直接的に入射される直接領域8cを設けると共に、左右に左鏡7A及び右鏡7Bで反射された像が入射される左反射領域8a及び右反射領域8bを設ける。撮像画素部8で撮像した画像はネットワークケーブル5aで接続される画像処理ECUへ送信されて、画像処理ECUで表示用画像に変換する処理が行われると共に、左右反射領域8a、8bで撮像した画像に対して距離算出に係る処理が行われる。
(もっと読む)
車載カメラの光軸ずれ検出装置
【課題】走行中の振動や周囲温度の変化などによって車載カメラの撮影光軸がずれた場合、そのずれ量を自動的に検出し、この検出に基づいて運転支援システムを動作させることができる車載カメラの光軸ずれ検出装置を提供すること。
【解決手段】フロントガラスなどに設けたマ−ク指標と、カメラ11の撮影画像からマ−ク指標の画像位置を選び、この画像位置情報をフレ−ムメモリに保存するカメラ制御部12と、フレ−ムメモリから読み出した基準となる画像位置情報と、新たに撮影されたマ−ク指標の画像位置情報を比較し、これら画像位置情報の差が所定の範囲内のときはフレ−ムメモリを新たな画像位置情報に更新し、所定の範囲外となるときは警告ブザ−などを起動させ、運転支援システム機能を停止させる車輌制御部14を備えた構成となっている。
(もっと読む)
車載型自動車事故自動動画撮影録画記録装置及びその記録方法
【課題】小型車載カメラとして取付車両による衝突事故の直前より、衝突直後までの状況を人為的な介在を受ける事無く動画映像として撮影録画記録し、外部電子装置にて衝突事故の直前より衝突、衝突直後までの状況を動画映像として再現する事を可能としたものである。
【解決手段】振動センサーにより車両使用の有無を判断し動画撮影の終始を制御する。動画映像の録画記録には電子記憶素子(メモリー)を第一、第二、第三記憶素子と三系統に分けて使用する。衝突事故発生時には衝突音を音響センサーにより感知し、時計により衝突音発生時を録画記録の基点時間とし、その基点時間より前後に設定された時間分の動画映像情報を一次記憶している第一及び第二記憶素子から第三記憶素子に複写記録保存する。保存されている動画映像情報を接続端子より外部電子装置に移行して外部電子装置にて取付車両の運転者と同等の視点からの衝突事故を動画映像で再現する事が出来る。
(もっと読む)
映像視覚情報を結合してリアルタイムで複数の顔を検出して追跡する顔検出・追跡システム及びその方法
【課題】 入力映像から複数の顔をリアルタイムで検出して追跡できるシステム及びその方法を提供する。
【解決手段】 入力映像から背景映像を除去して動きのある領域を抽出する背景除去部、顔皮膚色モデルから生成された皮膚色確率マップPskin及び全域的確率マップPglobalを利用し、動く領域から顔が位置しうる候補領域を抽出する候補領域抽出部、候補領域からICA特徴を抽出し、学習されたSVM分類器を用いて候補領域が顔領域であるか否かを判断する顔領域判断部及び皮膚色確率マップに基づき、次のフレームで顔の位置する確率を示す方向指向性カーネルにより顔領域を追跡する顔領域追跡部を含むシステム。
(もっと読む)
物体検出プログラムを記録したコンピュータ読み取り可能な情報記録媒体
【課題】参照点を任意の位置に設定可能として、照明変動の影響をうけることなく物体を検出する。
【解決手段】複数参照点選択手段は、画像の注目画素ごとに複数の参照画素を選択し(ステップA1乃至A3)、背景モデル作成手段は、これらの注目画素および参照画素に対して背景の輝度が照明変動の影響を受けて変化した場合の照明変動背景モデルを作成する。そして、距離計算手段は、輝度空間において、上記照明変動背景モデルと、注目画素、および参照画素に対応する背景画素の輝度値の各組が表す点との間の距離を計算する(ステップA4)。物体判別手段は、この距離に基づいて注目画素が物体を表す画素か否かを判別する(ステップA5乃至A9)。
(もっと読む)
ホーム監視システム
【課題】 ホーム監視システムに関し、危険を的確に検知して信頼性の高い警報を発することを可能にする。
【解決手段】 駅の改札口4に設けられた識別手段14、15により改札口4内への進入者の中から所定の監視対象条件を満たす監視対象者1を識別し、識別された監視対象者1のホーム2内での動きを追跡手段16、17、18によって追跡し、その追跡情報から監視対象者1の危険を検知して警報手段19により警報信号を出力する
(もっと読む)
2,001 - 2,020 / 2,029
[ Back to top ]