
Fターム[5C054FC12]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 関心領域処理 (4,623) | 関心領域の抽出;特定 (2,029)
Fターム[5C054FC12]に分類される特許
201 - 220 / 2,029
移動体画像追尾装置
【課題】付加センサを追加せず、追尾性能の劣化を改善する。
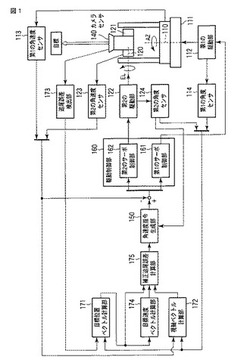
【解決手段】実施形態の移動体画像追尾装置は、駆動部、カメラセンサ、追尾誤差検出部、角度センサ、角速度センサ、第1計算部、第2計算部、補正追尾誤差検出部、生成部、および制御部を含む。追尾誤差検出部は、画像データから、移動体の視野中心からのずれ量である追尾誤差を検出する。第1計算部は、追尾誤差と角度とを用いて、移動体の位置ベクトルと速度ベクトルを計算する。第2計算部は、角度からカメラセンサの視軸ベクトルを計算する。補正追尾誤差検出部は、視軸ベクトルと位置ベクトルとの関係および速度ベクトルから、追尾誤差検出値が一定であるサンプリング期間よりも短い期間ごとに補正追尾誤差を計算する。生成部は、補正追尾誤差を使用して移動体を追尾するように駆動部を駆動する角速度指令値を生成する。制御部は、角速度指令値と角速度との差がなくなるように駆動部を制御する。
(もっと読む)
画像処理装置、画像処理システム、及び画像処理方法

【課題】俯瞰画像における撮像画像の不連続性による影響を抑制する。
【解決手段】画像処理装置は、車両の進行方向またはその反対方向に対応する第1の撮像画像と、前記車両の進行方向軸と交差する方向に対応する第2の撮像画像の重複領域に含まれる物体の位置を検出し、前記第1の撮像画像に、前記物体が第1の位置にあるときに第1の評価値、前記車両の進行方向軸からの距離がより大きい第2の位置にあるときに前記第1の評価値より小さい第2の評価値を割り当て、前記第2の撮像画像に、前記物体が前記第1の位置にあるときに第3の評価値、前記第2の位置にあるときに前記第3の評価値より大きい第4の評価値を割り当て、前記評価値が大きい方の撮像画像に前記物体が含まれるように境界を決定して、前記第1、第2の撮像画像をつなぎ合わせるので、撮像画像の不連続性を抑制できる。
(もっと読む)
車両用表示装置
【課題】視認者による検出対象物の知覚を的確に支援できる車両用表示装置の提供。
【解決手段】車両の前方領域90を撮影する近赤外線カメラ10によって生成される前方画像50を、表示画面40aに表示する車両用表示装置100である。車両用表示装置100は、前方画像50を取得する画像取得部31と、予め設定された検出対象物としての歩行者の画像53を検出する歩行者検出部35と、歩行者画像53を含む切出画像60を、前方画像50から切り出す切出部33と、切出画像60に含まれる歩行者画像53の画素数が、前方画像50に含まれる歩行者画像53の画素数よりも多くなるように、前方画像50及び切出画像60のうち少なくとも一方の画像の画素数を調整する画像縮小部37と、切出画像60を前方画像50に重畳して表示画面40aに表示する合成処理部39及び液晶ディスプレイ40と、を備える。
(もっと読む)
映像監視装置
【課題】 屋外に設けられた雲台に設置されて一定方向を回転しながら撮影してか映像監視装置は、ほとんど変化がない背景やマスクされた領域など、高解像度化が不要な領域が多く含まれており、画像全体を高解像度化するのは無駄が多い。
【解決手段】 本発明に係る映像監視装置は、旋回可能に設置され、パン、チルト、ズームを制御する制御情報に基づいて撮像する撮像装置の撮像画像より、高解像度化したい高解像度指定領域を指定するとともに、領域情報を出力する映像領域入力手段2と、制御情報と領域情報に基づいて、撮像装置の撮像した撮像画像より高解像度指定領域を選択する映像領域選択手段3と、複数の連続映像により高解像度映像を取得する高解像度映像取得手段4と、この高解像度映像と映像領域入力手段から出力される映像を重畳して表示装置に表示する映像出力手段5とを設けたものである。
(もっと読む)
車線認識装置及び車線認識方法
【課題】ノイズを区画線と判断する誤りを低減する技術を提供する。
【解決手段】車線認識装置は、時系列的な複数の原画像を入力する。その原画像の各々に対して、路上に描かれた区画線の候補となる候補位置が検出され、区画線候補位置履歴として蓄積される。時系列的な複数の原画像を合成することによって合成鳥瞰画像が作成される。所定の時点での合成鳥瞰画像の候補位置を中心として、区間線候補位置履歴が最も多数蓄積されている方向が、区画線が描かれている可能性が高い領域として推定される。より正確な区画線候補を狙った探索領域を設定することにより、ノイズを除外できる。
(もっと読む)
人物監視装置、人物監視方法、及びコンピュータプログラム
【課題】エリア内で動きのなくなった人物が当該エリア内に滞在していることと、当該エリアから退出したこととを正確に検出できるようにする。
【解決手段】作業者が滞在する可能性がある溶け込みエリアを設定する。アラーム通知伝文ANに含まれる作業者の数を超える数のレコードが在席管理テーブルにある場合、又は、アラーム解除伝文ACが送信されたときに在席管理テーブルのレコードがある場合であって、当該レコードの在席位置が溶け込みエリア内にある場合、当該レコードの溶け込み中フラグの値を「1」に設定する。その後、在席管理テーブルのレコード数を超える数のオブジェクトIDを含むアラーム通知伝文ANを受信すると、在席管理テーブルのレコードに含まれるIDと異なるオブジェクトIDの値に、溶け込み中フラグが「1」のレコードのIDの値を変更し、当該溶け込み中フラグの値を「0」にする。
(もっと読む)
画像処理装置およびトラクタ
【課題】トレーラを自動的に制御するためのシステムが車体に実装されていなくても、運転者がトレーラの振り子運動の傾向を捉えた安全な運転を促すことができる画像処理装置およびトラクタを提供する。
【解決手段】本発明の画像処理装置は、トラクタ130に連結されたトレーラ120を含むトラクタ130の後方の撮像画像を取得する画像取得手段4と、この画像取得手段4が取得した撮像画像にトレーラ120をガイドする指標を重畳し、この重畳画像を表示手段3に出力する重畳手段7を備え、この重畳手段7が、トレーラ120の横揺れを示す第1の指標141a、bと、トレーラ120の横揺れの継続状態を示す第2の指標142を重畳することを特徴とする。
(もっと読む)
撮像装置、情報処理装置、及び撮像領域の共有判定方法
【課題】撮像領域を共有している他の撮像装置を容易に検出すること。
【解決手段】被写体を撮像する撮像部(101)と、前記撮像部(101)により撮像される第1の撮像領域を算出する領域算出部(108)と、他の撮像装置により撮像される第2の撮像領域の情報を取得する領域情報取得部(109)と、前記第1の撮像領域と前記第2の撮像領域とが交わるか否かを判定する交差判定部(110)と、を備える、撮像装置が提供される。
(もっと読む)
物体検出装置、および、物体検出方法
【課題】撮影画像中の物体の物体像を確実に検出することを目的とする技術に関する。
【解決手段】
撮影画像に基づいて、カメラの光軸の実際の方向を示す情報を導出し、カメラの光軸の基準の方向を示す情報とカメラの光軸の実際の方向を示す情報との差に応じて、撮影画像中において検出領域とする範囲を変更する。これにより、物体の物体像の検出領域を撮影画像中の適正な範囲に設定でき、検出対象とすべき物体の物体像を確実に検出できる。
(もっと読む)
運転支援装置
【課題】運転状況に応じて後方車両との衝突と交差点での右左折による巻込みとを運転者に容易に注意喚起することができる運転支援装置を提供することを目的とする。
【解決手段】判定部13が交差点での左折を判定した場合、映像合成部12は自車両の左前端より左前方の位置から後方を見たときの合成映像を作成するとともに舵角に応じた自車両の左後輪の予想軌跡線を重畳し、判定部13が交差点での右折を判定した場合、映像合成部12は自車両の右前端より右前方の位置から左方を見たときの合成映像を作成し、判定部13が車線変更での左折を判定した場合、映像合成部12は自車両の左側方を撮影した撮像映像と自車両の後方を撮影した撮像映像とを並列した合成映像を作成し、判定部13が車線変更での右折を判定した場合、映像合成部12は自車両の右側方を撮影した撮像映像と自車両の後方を撮影した撮像映像とを並列した合成映像を作成することを特徴とする。
(もっと読む)
追尾装置
【構成】イメージャ16によって捉えられた被写界を表す探索画像データは、メモリ制御回路30によってSDRAM32の探索画像エリア32cに取り込まれる。CPU26は、顔辞書DC_Fに収められた辞書画像に対する符合度が閾値を上回る顔画像を探索画像エリア32cに格納された探索画像データから探索し、探知された顔画像上の特徴画像を追尾対象として指定し、そして指定された追尾対象を探索画像データを参照して追尾する。追尾時間は、探知された顔画像の辞書画像に対する符合度が大きいほど長くなるように制御される。また、顔画像の探索処理は、追尾処理が起動状態にあるとき停止される。
【効果】追尾性能が向上する。
(もっと読む)
画像処理装置、画像表示システム及び画像処理方法
【課題】不要な指標の表示を防止する。
【解決手段】画像表示システム10では、物体検出部22aが、撮影画像中の検出領域に存在する物体データを検出する物体検出処理を周期的に実行する。また、対応判定部22bが、直近の物体検出処理で検出された物体データと、管理テーブル24bに登録された過去の物体検出処理で抽出された物体データとを対応付ける対応判定処理を実行する。そして、第1削除部22cが、対応付けできない回数が所定条件を満足する物体データを管理テーブル24bから削除する。さらに、第2削除部22dが、検出領域DAの外縁に到達した物体データを、管理テーブル24bから削除する。そして、枠重畳部22eが、管理テーブル24bに登録されている物体データの位置を示す強調枠を撮影画像に重畳する。したがって、検出領域の外縁に到達した物体データの強調枠が表示されない。
(もっと読む)
並走体検出装置及び並走体検出方法
【課題】並走体の位置検出精度について向上を図ることが可能な並走体検出装置及び方法を提供する。
【解決手段】並走体検出装置1は、カメラ10にて得られた自車両Vの後側方側の異なる時刻の検出領域の画像を、鳥瞰視上で位置を合わせると共に、位置合わせされた異なる時刻の画像データの差分画像データに基づいて、並走体と地面との境界となる接地線を検出する計算機50を備えている。また、計算機50は、差分画像データに対して自車両Vの移動方向と略平行な複数の線をそれぞれ異なる位置に設定し、差分画像データのうち、設定した略平行な複数の線それぞれの自車両Vの遠方側におけるデータに対し、検出領域の画像を鳥瞰視に視点変換した際に並走体が倒れ込む方向に沿って、所定の差分を示す画素数をカウントして度数分布化することで複数の差分波形を生成し、生成した複数の差分波形の形状変化から並走体の接地線を検出する。
(もっと読む)
数値制御機器のテレビカメラモニター画面の関連操作方法
【課題】複数のコンピュータシステムのシステムプログラムの変更無しに、簡単に早く操作変更できるようにする。
【解決手段】制御機器の操作方法と、追加したい別の操作方法をテレビモニター画面上で関連付けるようにした。関連付けに使用する、テレビモニター画面は、多くの制御機器で使用され、その機能も簡単で、ほぼ共通の使用方法である。テレビモニター画面上での関連付けの演算は、関連付けの方法として使用し、関連付けの時のみの演算で、演算結果の関連数値を使用する、その関連数値の使用は、そのテレビモニター画面上の操作だけでなく、その関連数値を別の操作機器に関連付けて使用することで、別の制御機器の操作機器で操作出来る。
(もっと読む)
車両用周辺監視装置
【課題】表示部上に表示した移動体の検知枠により運転者等に移動体の存在を知らせる車両周辺監視装置において、前記運転者等に、前記検知枠の表示が与える煩わしさを軽減する車両用周辺監視装置を提供する。
【解決手段】移動体検出部52は、移動体の走行軌跡を判定し、表示処理部56は、判定された前記走行軌跡の延長方向に応じて、検知枠を非表示とする領域を切り替えるようにしている。このようにすれば、検知枠で運転者に移動体の存在を知らせる必要のある場合のみ検知枠が表示されるようになるので、ユーザに、検知枠の表示が与える煩わしさを軽減することができる。
(もっと読む)
車両用周辺監視装置
【課題】移動体検出のための画像処理負荷を効率的に低減しつつ誤検知を低減する車両用周辺監視装置を提供する。
【解決手段】移動体検出部は、ソナーが障害物を検出していないときの近接領域Aの輝度(路面の輝度と推定)と、遠方領域B、Cの輝度とを比較し、輝度の差が小さい遠方領域B、C(路面と推定)での前記移動体の検知感度を高くし、輝度の差が大きい遠方領域B、C(路面だけではない。)での前記移動体の検知感度を低くするようにしたので、移動体検出のための画像処理負荷を効率的に低減しつつ誤検知を低減することができる。
(もっと読む)
運転支援情報提供装置
【課題】車両の後方に存在する障害物の形状によらず、当該車両が有するテールゲートの開閉に必要な最小空間を確保できない状態となるまでの正確な情報を提供する運転支援情報提供装置を提供すること。
【解決手段】運転支援情報提供装置は、跳ね上げ式のテールゲートを有する車両の後方領域に基づく情報から当該後方領域の空間座標を導出する後方領域空間座標導出部と、後方領域に存在する障害物の位置を空間座標上で検出する障害物検出部と、障害物検出部が検出した障害物の位置とテールゲートがその開閉時に通過するテールゲート開閉領域を空間座標上で比較して、3次元空間における障害物とテールゲート開閉領域とが最も近接した最近接距離を算出する最近接距離算出部と、最近接距離に関する情報を出力するよう処理する出力処理部とを備える。
(もっと読む)
画像処理装置、駐車制御システム、及び、画像処理方法
【課題】駐車スペースの周りに物体が存在しない場合にも駐車スペースを判定することができる技術を提供する。
【解決手段】画像処理装置は、車両の速度に関する情報と車外画像に含まれる車両の左右方向に略沿って延びる第1ラインを認識したタイミングとに基づいて、車両を駐車可能なスペースの有無を判定するため、車外画像に基づいて車両を駐車可能なスペースを判定することができる。
(もっと読む)
画像処理装置、画像処理方法、及び、プログラム
【課題】短時間で三次元モデルを作成する。
【解決手段】三次元モデリング部304は、キーフレーム記憶部303に数フレーム周期毎に記憶されているペア画像から三次元モデルを作成する。また、特徴点検出部306は、キーフレーム記憶部303に記憶されている画像の特徴点を検出する。そして、位置変化推定部308は、検出した特徴点が最新画像内においてどの位置に変化したかを推定し、推定した結果に基づいて、作成した三次元モデルを最新画像に対応した三次元モデルに変換するための変換パラメータを算出する。そして、再構成部311が、フレーム周期毎に、算出された変換パラメータを用いて作成した三次元モデルを再構成し、画像出力部314が表示装置10に表示させる。
(もっと読む)
画像処理装置及び画像処理方法
【課題】 撮像画像内において変化を検知する検知領域と、マスク領域とが重複する場合、意図した変化を検知できない恐れがあった。
【解決手段】 変化検知部135は、画像内において変化を検知する検知領域の指定情報と、画像内のマスク領域の指定情報とを取得し(S402)、変化検知部135は、検知領域とマスク領域が重複する場合、検知領域とマスク領域が重複しない場合よりも、検知領域内において検知された変化領域が小さくても変化発生イベントが出力されるように変化発生イベントの出力条件を決定する(S406、407)。
(もっと読む)
201 - 220 / 2,029
[ Back to top ]