
Fターム[5C054FC13]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 関心領域処理 (4,623) | 動き抽出 (836)
Fターム[5C054FC13]に分類される特許
21 - 40 / 836
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
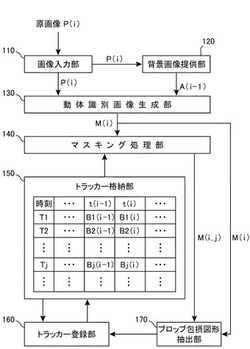
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
画像処理装置、画像処理方法、及び、プログラム

【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】動体検出部は、現画像において、背景とは異なる部分の画像である動体を検出し、一時停止判定部は、動体が、所定の一定時間以上停止しているかどうかを判定する。信頼度処理部は、一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とを用いて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度を求める。不動体検出部は、不動体信頼度に基づいて、現画像から、不動体を検出する。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
監視装置、及びプログラム
【課題】
監視システムにおいて、物体の消失を検知した際に監視者の監視負担を軽減する。
【解決手段】イベント検知部22は、メモリー30内の時系列的に異なる複数の画像フレームを読み込んで比較し、画像フレーム内の領域にイベントが発生したことを検知する。消失画像処理部231は、メモリー30内の過去の画像フレームを読み込み、過去の画像フレーム内の画像を抽出する。そして、MPEG処理部232が、消失画像処理部231で抽出した画像を、入力画像フレームに重畳させて映像データを生成し出力する。
(もっと読む)
検知装置、検知方法及びプログラム
【課題】動きのある人等と動きが静止した物とを容易に判断する。
【解決手段】動体・不動体検出部106は、撮影部102により撮像された画像データから不動体領域を検出する。不動体拡大映像供給部109は、動体・不動体検出部106により検出された不動体領域を拡大させる。動体・不動体検出部106は、拡大された前記不動体領域を用いて動体又は不動体を検知する。
(もっと読む)
監視装置、警備システム及び監視装置用プログラム
【課題】 従来に比べて「真の侵入」検知の誤報を低減する。
【解決手段】 第1〜3監視エリアのうち1つ、もしくは2つ以上の監視エリアにて不審者等の侵入(仮侵入)があった旨が検知された場合であって、「仮侵入」1つの場合は、2秒以上経過後に再びが「仮侵入」が検知されたとき、2つ以上の監視エリアで「仮侵入」が検知された場合は各検出時刻に2秒以上の時間差があったときに「真の侵入」があったと判断し、不法侵入者ありとしてメール等により担当警備会社に報知し、直ちに現地に急行する。一方、上記検出モードで、時間差が2秒以上なかった場合は、監視エリアにおける「真の侵入」がなかったと判断し(誤報)、20秒後にはタイムアウトして初期状態に戻る。
(もっと読む)
接近物検知装置および接近物検知方法
【課題】接近物であるか否かの判定を迅速に行うことができ、静止物が接近物であるとの誤判定を低減して、接近物警報システムに適用する際の静止物を対象とした誤警報の出力を低減することができる「接近物検知装置および接近物検知方法」を提供すること。
【解決手段】接近物候補検出手段4によって立体物の最新の検出結果が取得される毎に、最新の検出結果に示される立体物の重心を算出する重心算出手段5と、前記重心の算出結果に基づいて、前記重心の移動方向を算出する移動方向算出手段6とを備え、接近物判定手段7は、前記重心の移動方向が、移動体への接近を示す方向である場合には、接近物であると判定し、前記重心の移動方向が、移動体からの離間を示す方向である場合には、接近物でないと判定すること。
(もっと読む)
画像認識装置
【課題】自車両の走行道路の状態に拘らず、歩行者の検知漏れや無駄な検知動作をなくすことができる探索領域を設定でき、歩行者の検知性能を向上させることができる画像認識装置の提供。
【解決手段】算出部22は、自車両の旋回に関する情報を含む情報として赤外線カメラ30から前方画像50を取得し、前方画像50の計算領域66のオプティカルフローを計算することで、方向ベクトルを算出し、その方向ベクトルの水平方向成分を走行道路のカーブの方向に関する情報として算出する。そして、探索領域設定部24は、水平方向成分に基づいてカーブの方向を判定し、歩行者を表す画像58を探索するための探索領域52を、探索領域52の前方画像50における大きさはそのままに、判定したカーブの方向に向けて移動させた位置に設定する。そして、認識部28がその位置に設定された探索領域52内の歩行者を表す画像58を検知する。
(もっと読む)
画像処理装置、画像処理方法
【課題】 監視カメラ等から得た映像を使用して画面内の特定箇所を物体や人体が通過したことを検知する場合において、画面端付近での誤検知を防止する為の技術を提供すること。
【解決手段】 表示画面内を移動するオブジェクトが、該表示画面内に設定されているオブジェクト検知用領域を通過したことを検知する画像処理装置100において、表示画面の枠部に上記検知を禁止する領域を設定する。そして、設定した領域以外で上記の検知を行う。
(もっと読む)
環境認識装置および環境認識方法
【課題】曲線を描いたり、それ自体が傾斜したりする対象物の特定効率および特定精度の向上を図る。
【解決手段】環境認識装置130は、検出領域内を分割した複数のブロック毎の輝度を取得し、ブロック毎の輝度のエッジが伸長する方向に基づくエッジ方向を導出し、エッジ方向に基づいてブロック同士を関連付け、エッジ軌跡を生成し、複数のエッジ軌跡により囲まれる領域をグループ化して対象物とし、対象物を特定物として決定する。
(もっと読む)
全方位監視画像処理システム
【課題】単眼カメラで撮影した各フレーム単位の360°監視映像について、その全体映像を細部に亘り明瞭に表示できるとともに、360°監視映像の一部に存在する監視対象物となる動物体若しくは静物体を細部に亘り明瞭に表示することができる。
【解決手段】ブロッキング輝度伸張処理部20は、画像バッファメモリ13に記憶された楕円面の360°全周入力画像(Pa)とオブジェクト画像バッファメモリ19に記憶された切り出し画像(オブジェクト画像)を処理対象に、表示出力する画像に対して画素単位のブロッキング輝度伸張処理を実施する。
(もっと読む)
監視装置、監視方法及び監視プログラム
【課題】誤検出を低減し、高精度に不審対象を監視することができる監視装置を提供する。
【解決手段】対象検出部21は、撮像部1により撮像された動画像から監視する対象を検出する。動線情報作成部22は、対象検出部21により検出された対象の移動ベクトルから動線情報を作成する。不審行動判定部24と、動線情報から、予め設定された不審行動パターン31に基づいて、対象検出部21により検出された対象が不審対象候補か否かを判定する。複合行動判定部26は、不審対象候補の動線情報と、不審対象候補の周辺に存在する周辺対象の動線情報とから、予め設定された条件である複合行動パターン32に基づいて、不審対象候補が不審対象か否かを判定する。
(もっと読む)
画像処理装置
【課題】回路規模が低減された簡易な構成として、物体の動きを映像によって確認可能とするための画像処理装置を提供すること。
【解決手段】実施形態によれば、画像処理装置であるDSP4は、積算部12及び動き判別部13を有する。積算部12は、映像信号から得られる画素ごとの情報である輝度信号21を積算する。動き判別部13は、撮影された映像の時系列的な変化を積算部12による積算結果から検知する。動き判別部13は、映像での物体の動きを判別する。積算部12は、単位領域内について、第1のフレームの情報を積算してから、第1のフレームについての積算の際とは信号レベルの符号を反転させて、第2のフレームの情報をさらに積算する。動き判別部13は、積算部12における第1のフレーム及び第2のフレームについての当該積算結果に応じて、単位領域内の動き判別を実施する。
(もっと読む)
画像記録装置
【課題】画像記録装置内の画像を記録する記録媒体には、HDD(Hard Disk Drive)またはSSD(Solid State Drive)のいずれか一方のみが用いられており、それぞれの特徴に応じていずれかが選択されるのみであり、どうしてもそれぞれ苦手な場面が存在した。
【解決手段】本発明によると、記録媒体にHDDとSSDを併用し、それぞれの特徴を生かして、通常記録時にはHDDに、アラーム記録時にはSSDに記録することで、より安全性が高く効率的な画像記録を実現することができる。
(もっと読む)
物体検知装置、物体検知方法及びプログラム
【課題】撮像手段の撮像方向の変更が行われた場合でも、物体検知の誤検知の防止を低コストで実現することを目的とする。
【解決手段】検知手段は、物体領域の検知中に撮像手段の撮像方向の変更が行われると、撮像方向の変更中は物体検知の処理を中断し、撮像方向の変更が終了すると物体検知の処理を再開し、作成手段は、検知手段における物体検知の処理の再開の後の検知結果に応じて物体領域検知用の画像を初期化することによって課題を解決する。
(もっと読む)
周辺監視装置
【課題】距離感や速度感に対する違和感を抑制することができる周辺監視装置を提供することを課題とする。
【解決手段】周辺監視装置1は、車両の周辺をカメラ22により撮像し、撮像された画像を運転者に提示する表示部21と、表示部21を使用時の前記運転者による前記運転操作の操作タイミングとを取得する電子ミラータイミング取得部32と、操作タイミングに応じて表示部21により運転者に提示される画像を補正する比較部34とを備える。
(もっと読む)
画像処理装置、画像処理方法、及び運転支援システム
【課題】撮像画像内の不明確な表示物を、使用者に瞬時且つ正確に認識させることができる運転支援システムを提供する。
【解決手段】運転支援システム1は、カメラ3と記憶部5及びCPU6を有する処理装置4とモニタ22とを備える。CPU6は、カメラ3が撮像した動画像から生成した処理画像9を用いて障害物11を検知し、障害物11を検知したとき、当該処理画像9を処理対象画像13として処理対象画像13内に障害物11を基準とした対象領域16を設定する。CPU6は、対象領域16の直径Rが切り替え領域の直径Rc未満である場合には対象領域16を拡大領域の大きさに拡大し、切り替え領域の直径Rc以上で拡大領域の直径Rm未満である場合には対象領域16を所定の倍率で拡大して、拡大縮小画像19を生成し、拡大縮小画像19と処理対象画像13とを合成して強調画像14を生成し、モニタ22に出力して表示させる。
(もっと読む)
運転支援装置
【課題】運転支援装置において、オプティカルフロー検出等の画像処理機能を向上することにある。
【解決手段】画像処理手段(5)は、広角レンズ(3)を有する撮像手段(4)により撮像される画像上の各画素の座標に対応するイメージプレーン上の各画素の座標を記録した記録手段(8)と、撮像手段(4)により撮像された画像上の画素位置から記録手段(8)に記録された座標の対応関係に基づいてイメージプレーン上の画素位置を取得する画素位置取得手段(9)とを備える。
(もっと読む)
映像監視システム及び人数推定方法
【課題】撮像された画像内に存在する人物の人数を推定することが可能な映像監視システム及び人数推定方法を実現する。
【解決手段】撮像機器から取得した映像信号に基づく画像データから方向に関する特徴を算出するとともに、前記方向に関する特徴についてのヒストグラムを所定の大きさの時空間において算出した時空間ヒストグラムを作成し、前記時空間ヒストグラムから動きの複雑さを表す時空間評価値を算出するとともに、前記時空間評価値の時間変化を算出し、前記時空間評価値の時間変化から画像内または特定領域に存在する人数が2人以上の所定人数以上か否かを推定する。
(もっと読む)
作業者安全検査装置
【課題】画像処理により屋内作業場所において単独作業を行う作業者の安全検査を行うことができる作業者安全検査装置を提供する。
【解決手段】画像を撮像する監視カメラ1と、前記監視カメラ1で撮像した画像を差分計算又は相関計算を用いた画像処理により画像上に動いて入って来た対象物が一定時間以上静止した状態を検出した場合に異常と判断する画像処理部2と、前記画像処理部2における判断結果を表示する結果表示部3とを備えた。
(もっと読む)
置き去り又は持ち去り検知システム及び前記検知システムにおける置き去り又は持ち去り発生時刻を検知する方法
【課題】置き去り又は持ち去りが発生したときの映像又は画像を容易かつ確実に得る。
【解決手段】 異物を検知してから一定時間検知が継続されたとき、置き去り又は持ち去りと判断する置き去り又は持ち去り検知システムであって、タイマー制御部10cは、異物検知と同時にタイマーを始動し、前記検知時間内において異物検知が一時中断されたとき、前記中断時間の長さに応じて検知タイマーを停止又は逆進させ、発生時刻演算部10dは、検知タイマーのタイマー値及び停止又は逆進期間のタイマー値に基づき、置き去り又は持ち去り発生時刻を演算する。演算した発生時刻に基づき保存されている同時刻の撮影画像を取得する。
(もっと読む)
21 - 40 / 836
[ Back to top ]