
Fターム[5C054FC13]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 関心領域処理 (4,623) | 動き抽出 (836)
Fターム[5C054FC13]に分類される特許
41 - 60 / 836
作業者安全検査装置
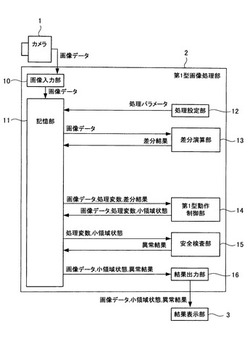
【課題】画像処理により屋内作業場所において単独作業を行う作業者の安全検査を行うことができる作業者安全検査装置を提供する。
【解決手段】画像を撮像する監視カメラ1と、前記監視カメラ1で撮像した画像を差分計算又は相関計算を用いた画像処理により画像上に動いて入って来た対象物が一定時間以上静止した状態を検出した場合に異常と判断する画像処理部2と、前記画像処理部2における判断結果を表示する結果表示部3とを備えた。
(もっと読む)
移動物体監視システム

【課題】進入監視エリアに対する物体の移動を効果的に検知して、小さな処理負担で移動物体を監視できる移動物体監視システムの提供。
【解決手段】カメラの撮影視野内で進入監視エリアの外側に任意に設定される第1指標帯の画像領域である第1画像領域と、この第1指標帯との間に任意に設定される第2指標帯の画像領域である第2画像領域を撮影画像から抽出する画像抽出部と、第1・第2画像領域の画像特徴量である第1・第2画像特徴データを算定する特徴量算定部と、第1・第2画像特徴データに基づいて進入監視エリアに対する物体移動を評価するための物体移動評価データを演算する評価データ演算部と、物体移動評価データの経時変化に基づいて進入監視エリアへの物体の進入又は退出あるいはその両方を推定する物体移動推定部とが備えられている。
(もっと読む)
異常検知装置
【課題】異常時の静止人物を効果的に検出する。
【解決手段】異常検知装置は、監視領域を撮像した監視画像を順次取得する撮像部20と、前記監視画像を処理する制御部22と、前記制御部が異常を検出すると異常信号を出力する出力部23を具備する。制御部22は、監視画像から人物を検出する人物抽出手段220と、人物を時間的に追跡する人物追跡手段221と、人物について略静止している静止人物を検出する静止人物検出手段223と、静止人物の検出中に、当該静止人物を検出したとき既に追跡中となっているその他の人物が追跡できなくなると異常を検出する異常検出手段225と、を有する。
(もっと読む)
動物監視システム、監視方法及びプログラム
【課題】試験動物の死亡を検出し、オペレータに知らせる。
【解決手段】ビデオカメラ11により動物を撮影して動画像を取得する。不動状態判定部13により、ビデオカメラ11からの動画データに基づき動物31の不動状態が一定時間経過したか否かを判定する。異常判定部14で、不動状態時間の開始時刻が動物の活動時間帯に属しているか否かを判定する。活動時間帯に属しているときに異常と判定する。異常判定部14で異常と判定したときに、報知部15により、ディスプレイ23に動物死亡のポップアップメニューを表示し、スピーカ24から警報を発する。報知部15は、異常と判定したときにオペレータの携帯電話端末41に動物死亡メールを送信する。
(もっと読む)
通信システム、携帯端末、およびプログラム
【課題】撮像者に煩雑な操作を行わせることなく、撮像した動画を当該撮像者の意図した映像品質で遠隔地の動画表示装置のユーザに視聴させることを可能にする。
【解決手段】動画を撮像し当該動画を表す動画データを出力するカメラを内蔵する携帯端末に、ユーザの体動に伴って生じる当該端末の動きの大きさを検出する動き検出手段を設ける。そして、前記カメラにより撮像した動画を表す動画データを通信網を介して動画表示装置に表示する際には、当該動画データの1フレーム当たりのデータ量と通信網を介して当該動画データを送信する際のフレームレートの少なくとも一方を、動き検出手段により検出された動きの大きさに応じて調整しつつ送信する処理を実行させる。
(もっと読む)
対象物の認識システム、見守りシステム、監視システム
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
カラオケ装置
【課題】利用者を撮影するカラオケ装置において、利用を重ねても利用者がその都度楽しむことのできる技術を提供する。
【解決手段】カラオケ装置1の対応関係記憶部143には、楽曲と衣装画像との対応関係が記憶されている。歌唱者によって楽曲が選択されると、CPU11は、選択された楽曲に対応する衣装画像を、対応関係記憶部143に記憶された対応関係に従って選択する。CPU11は、映像取得部21によって撮影された映像及び検出された被写体の深度に従って歌唱者の動きを検出し、検出した動きに追従するように衣装画像を加工する。CPU11は、加工した衣装画像と歌唱者の歌唱映像とを合成してディスプレイ22に表示する。
(もっと読む)
自転車検出装置及び照射装置
【課題】本発明は、自転車検出装置及び照射装置に係り、暗所において接近する自転車を正確に検出することにある。
【解決手段】照射手段から光が照射される方向を含む領域を撮影するカメラと、カメラに撮影される撮像画像内の光の強さが所定範囲内にあるか否かを判別する強度判別手段と、カメラに撮影される撮像画像内の光が上下に往復運動するか否かを判別する往復運動判別手段と、強度判別手段により肯定判定がなされ、かつ、往復運動判別手段により肯定判定がなされる場合に、前記方向に自転車が存在すると判定する自転車判定手段と、を設ける。
(もっと読む)
異常パターンの発見
【課題】 異常パターン発見のための方法、システム及び製造物品を提供する。
【解決手段】 複数の異なるグリッドに分割されたビデオ・データ画像フィールドにおいてオブジェクトの移動の軌跡が追跡される。ビデオ・データから軌跡に関する大域的画像特徴を抽出し、これを学習軌跡モデルと比較して、学習軌跡モデルへの適合性の関数として大域的異常検出信頼度判定値を生成する。また、オブジェクト軌跡を含む画像フィールド・グリッドの各々についての局所的画像特徴を抽出し、これをグリッドについての学習特徴モデルと比較して、グリッドの学習特徴モデルへの適合性の関数として各々のグリッドについての局所的異常検出信頼度判定値を生成する。大域的異常検出信頼度判定値をグリッドについての局所的異常検出信頼度判定値に融合させて、追跡されるオブジェクトに関する融合異常判定とする。
(もっと読む)
録画装置及び検索再生装置
【課題】本発明は、信号の伸張処理等の膨大な信号処理を必要とせずに、モーションのある映像を録画、検索再生できる、録画装置及び検索再生装置の提供を目的とするものである。
【解決手段】本発明にかかる録画装置は、圧縮された映像データの、各フレームデータのデータサイズに基づいて、時々刻々のモーションレベルを示すモーション情報を検出する検出手段としてのモーション検出モジュール122と、映像データの時刻情報と関連づけて、圧縮された映像データ及びモーション情報を記憶する記憶手段としての記憶装置13とを備えることを特徴とする。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】複数の遮蔽物が重なり合って見える環境であっても、安定した物体追跡を可能にすることを目的とする。
【解決手段】画像から追跡対象を検出し、追跡する情報処理装置であって、追跡対象を検出できなかった場合に追跡対象が物体によって遮蔽されたか否かを判定する判定手段と、判定手段で追跡対象が物体によって遮蔽されたと判定された場合、画像より物体の領域と、物体と重複する物体の領域と、を抽出する抽出手段と、抽出手段で抽出された領域を関連付け、関連付けた領域に基づいて、次に追跡対象が現れる領域を設定する設定手段と、を有することによって課題を解決する。
(もっと読む)
画像認識表示システム及びこれに用いるカメラ
【課題】伝送路の使用帯域幅を削減しつつ高精度の画像認識を行う画像認識表示システムを提供すること。
【解決手段】カメラ1は、画像表示に用いる表示画像信号を生成する表示画像信号処理回路13と、画像認識に用いる認識用画像信号を生成する認識用画像信号処理回路14と、表示画像信号と認識用画像信号の差分信号を生成する差分回路15とを備え、表示画像信号と差分信号を伝送路2へ送出する。画像認識処理装置3は、伝送路2を介して受信した表示画像信号と差分信号を加算して認識用画像信号を復元する加算回路32と、認識用画像信号を用いて特定の被写体の認識処理を行う画像認識処理回路33と、表示画像信号と認識処理の結果を合成して表示装置4へ出力する表示処理回路34とを備える。
(もっと読む)
人物監視装置、人物監視方法、及びコンピュータプログラム
【課題】エリア内で動きのなくなった人物が当該エリア内に滞在していることと、当該エリアから退出したこととを正確に検出できるようにする。
【解決手段】作業者が滞在する可能性がある溶け込みエリアを設定する。アラーム通知伝文ANに含まれる作業者の数を超える数のレコードが在席管理テーブルにある場合、又は、アラーム解除伝文ACが送信されたときに在席管理テーブルのレコードがある場合であって、当該レコードの在席位置が溶け込みエリア内にある場合、当該レコードの溶け込み中フラグの値を「1」に設定する。その後、在席管理テーブルのレコード数を超える数のオブジェクトIDを含むアラーム通知伝文ANを受信すると、在席管理テーブルのレコードに含まれるIDと異なるオブジェクトIDの値に、溶け込み中フラグが「1」のレコードのIDの値を変更し、当該溶け込み中フラグの値を「0」にする。
(もっと読む)
特定事象検出装置、システム、方法及びプログラム
【課題】監視対象の環境が変化する状況でも、特定の事象を検出することができる特定事象検出装置を提供する。
【解決手段】撮影手段が所定の場所を撮影した画像から物体を検出する物体検出手段201と、物体検出手段201が検出した物体の種別を識別する物体識別手段202と、物体識別手段202が識別した物体の種別に基づいて、予め記憶している特定の事象を検出するための事象検出ルールのうちの移動体に対応する事象検出ルールを特定する事象検出ルール特定手段203と、事象検出ルール特定手段203が特定した事象検出ルールで示される事象を物体の状態が満たしているか否かを判定する検出判定手段204とを含む。
(もっと読む)
移動体画像追尾装置
【課題】付加センサを追加せず、追尾性能の劣化を改善する。
【解決手段】実施形態の移動体画像追尾装置は、駆動部、カメラセンサ、追尾誤差検出部、角度センサ、角速度センサ、第1計算部、第2計算部、補正追尾誤差検出部、生成部、および制御部を含む。追尾誤差検出部は、画像データから、移動体の視野中心からのずれ量である追尾誤差を検出する。第1計算部は、追尾誤差と角度とを用いて、移動体の位置ベクトルと速度ベクトルを計算する。第2計算部は、角度からカメラセンサの視軸ベクトルを計算する。補正追尾誤差検出部は、視軸ベクトルと位置ベクトルとの関係および速度ベクトルから、追尾誤差検出値が一定であるサンプリング期間よりも短い期間ごとに補正追尾誤差を計算する。生成部は、補正追尾誤差を使用して移動体を追尾するように駆動部を駆動する角速度指令値を生成する。制御部は、角速度指令値と角速度との差がなくなるように駆動部を制御する。
(もっと読む)
監視用画像処理装置
【課題】人物をマスク画像で効果的に隠しプライバシー保護を十分に図ることができる監視用画像処理装置を提供することを目的とする。
【解決手段】 監視対象エリアの現在の画像である現画像を記憶する現画像記憶手段と、前記現画像と比較するための比較用画像を記憶する比較用画像記憶手段と、前記現画像と前記比較用画像とを比較し変化領域を抽出する変化領域抽出手段と、前記変化領域内の各輝度値を所定の閾値で2値化し、該2値化後の結果に基づいて前記現画像内のマスキングする領域を設定するマスク領域設定手段と、前記マスク領域内を覆う第1のマスク画像を作成する第1のマスク画像作成手段と、前記現画像の前記マスク領域に前記第1のマスク画像を重ね合わせた重ね合わせ画像を作成する重ね合わせ手段とを有することを特徴とする。
(もっと読む)
周辺監視装置
【課題】処理負荷を軽減しつつ広い範囲の障害物を検出する「周辺監視装置」を提供する。
【解決手段】カメラ撮影範囲に障害物が存在しない場合には、主監視領域220については15フレーム/秒の画像フレームを用いた障害物の検出を行い、他の領域については10フレーム/秒の画像フレームを用いた障害物の検出を行う(a)。主監視領域220に写り込む範囲に障害物が存在する場合には、主監視領域220についてのみ30フレーム/秒の画像フレームを用いた障害物の検出を行う(b)。主監視領域220外の領域に写り込む範囲にのみ障害物が存在する場合には、最も近い障害物が写り込んでいる領域及びその周辺を含むように着目領域300を設定し、着目領域については15フレーム/秒の画像フレームを用いた障害物の検出を行い、他の領域については10フレーム/秒の画像フレームを用いた障害物の検出を行う(c)。
(もっと読む)
物体検出装置、および、物体検出方法
【課題】撮影画像中の物体の物体像を確実に検出することを目的とする技術に関する。
【解決手段】
撮影画像に基づいて、カメラの光軸の実際の方向を示す情報を導出し、カメラの光軸の基準の方向を示す情報とカメラの光軸の実際の方向を示す情報との差に応じて、撮影画像中において検出領域とする範囲を変更する。これにより、物体の物体像の検出領域を撮影画像中の適正な範囲に設定でき、検出対象とすべき物体の物体像を確実に検出できる。
(もっと読む)
車両用周辺監視装置
【課題】表示視野範囲に応じて、検出移動体の検知枠の表示・非表示を最適化した車両用周辺監視装置を提供する。
【解決手段】車両周辺の撮像画像を取得する撮像部(カメラ)12と、前記撮像画像に基づき、移動体を検出する移動体検出部52と、移動体検出部52で検出された移動体を囲む検知枠を生成する検知枠生成部54と、表示部30と、前記撮像画像に対し前記検知枠を重ね合わせて表示部30に表示させる表示処理部56と、を備え、表示処理部56は、表示視野範囲の切り替えに応じて、検知枠の表示と非表示とを切り替える。
(もっと読む)
車両用周辺監視装置
【課題】移動体検出のための画像処理負荷を効率的に低減しつつ誤検知を低減する車両用周辺監視装置を提供する。
【解決手段】移動体検出部は、ソナーが障害物を検出していないときの近接領域Aの輝度(路面の輝度と推定)と、遠方領域B、Cの輝度とを比較し、輝度の差が小さい遠方領域B、C(路面と推定)での前記移動体の検知感度を高くし、輝度の差が大きい遠方領域B、C(路面だけではない。)での前記移動体の検知感度を低くするようにしたので、移動体検出のための画像処理負荷を効率的に低減しつつ誤検知を低減することができる。
(もっと読む)
41 - 60 / 836
[ Back to top ]