
Fターム[5C054FC13]の内容
閉回路テレビジョンシステム (47,623) | 映像解析処理 (5,931) | 関心領域処理 (4,623) | 動き抽出 (836)
Fターム[5C054FC13]に分類される特許
81 - 100 / 836
接触可能性検知装置、接触可能性検知方法、及びプログラム
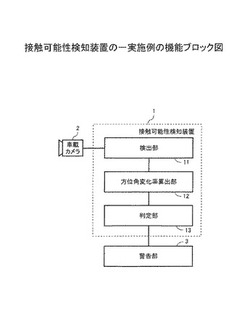
【課題】対象車両を撮像した画像の特徴点のオプティカルフローを利用して行う対象車両の自車両への接触の可能性の有無の判定の誤りを防止する。
【解決手段】検出部11は、自車両の車載カメラ2が対象車両を撮像して得た時系列の撮像画像から、撮像画像を構成している画素のオプティカルフローを求める。そして、このオプティカルフローの向きが、撮像画像における消失点から発散する方向に向いている画素の集合に基づき形成される検出領域を、撮像画像から検出する。方位角変化率算出部12は、前述の時系列の撮像画像に基づいて、検出領域についての撮像画像での水平線方向の端部を自車両から見たときの方位角の時間変化率を算出する。判定部13は、この方位角の時間変化率と所定の時間変化率閾値との大小比較の結果に基づいて、前述の検出領域に映っている対象車両についての自車両への接触の可能性の有無を判定する。
(もっと読む)
移動物体追跡装置

【課題】監視空間内の移動物体を時刻毎に生成した複数の予測位置に基づいて追跡する装置において、移動物体の現時刻での予測位置が監視空間内の障害物の領域に設定されると追跡精度が劣化する。
【解決手段】予測位置設定部は記憶部に記憶される過去の位置情報を用いて動き予測を行い、移動物体の現時刻における複数の予測位置を求める。その際、予測位置修正部53は、複数の予測位置のうちその移動元となる1時刻前の予測位置220との間に障害領域42aが存在する予測位置221を移動元位置から見て障害領域42aより手前の位置の予測位置241に修正する。物体位置算出部56は、修正された予測位置を含む複数の予測位置それぞれにて有する移動物体の画像特徴に基づいて、移動物体の現時刻における移動先位置を判定する。
(もっと読む)
監視システム及び監視装置
【課題】監視エリアへの侵入者を自動追跡して撮影可能であるとともに、複数の侵入者が同時に侵入した場合であっても、当該複数の侵入者を漏れなく撮影することが可能な、監視システムを得る。
【解決手段】監視システム5は、監視装置3と表示装置6とを備え、監視装置3は、所定の監視エリア4を撮影する広角カメラ11A,11Bと、広角カメラ11A,11Bによって撮影された撮影画像内に移動物体が含まれている場合に、当該移動物体を自動追跡して撮影することにより、当該移動物体の拡大画像300を取得して表示装置6に表示する望遠カメラ12Aと、オペレータによって遠隔操作されることにより、広角カメラ11A,11B及び望遠カメラ12Aとは独立して、監視エリア4内の所望箇所の画像を取得して表示装置6に表示可能な望遠カメラ12Bと、を有する。
(もっと読む)
対象識別装置及び対象識別方法
【課題】撮影画像内に移動物体が含まれている場合に、その移動物体を正確に識別することが可能な、対象識別装置を得る。
【解決手段】対象識別装置としての監視装置3は、動画像を撮影する撮影部と、撮影部によって撮影された撮影画像200A内に移動物体が含まれている場合に、当該撮影画像200Aのうち当該移動物体に対応する画像領域71,72に関して、赤外域を含む特定の複数の波長のスペクトルを検出し、当該検出の結果に基づいて前記移動物体の材質を分析する材質分析部39Aと、前記移動物体の材質に関するパラメータを含めて、当該移動物体の特徴量を表す特徴データを生成する特徴データ生成部24Aと、を備える。
(もっと読む)
監視システム、および監視サーバ
【課題】その状態が異常であると推定された不審者や不審物等のオブジェクトが検出されたときに、そのオブジェクトに対する対応指示を迅速、且つ適正に行う監視システムを提供する。
【解決手段】監視サーバ2は、携帯端末3毎に、その携帯端末3の位置を管理する携帯端末位置管理テーブルを記憶している。また、監視サーバ2は、オブジェクトの異常状態の種類を分類した項目毎に、そのオブジェクトに対する対応指示を通知する携帯端末3を決定する条件を登録した異常状態分類テーブルを記憶している。監視サーバ2は、監視カメラ端末1から異常状態であるオブジェクトの検出にかかる通報があると、携帯端末位置管理テーブル、および異常状態分類テーブルを用いて、そのオブジェクトに対する対応を指示する携帯端末3を判断する。監視サーバ2は、ここで判断した携帯端末3に対して、異常状態であることが通報されてきたオブジェクトに対する対応指示を送信する。
(もっと読む)
画像監視センサ
【課題】画像による監視空間の一部を検知空間とする人体センサを備えた画像監視装置において、画像上に表示する人体センサの検知エリアを精度良く特定する。
【解決手段】監視空間内でのウォークテストを行い、画像内での人像の位置に対応した人体センサの検知信号レベルの特性150を測定する。当該特性150に基づいて、検知信号が人体検知の基準レベルZ1以上である人像位置を包含する検知位置分布範囲Roを抽出する。Z1より低い人体検知の許容レベルZ2を設定し、範囲Roの両側の距離Bの範囲に存在するZ2以上である人像位置を包含するように、範囲Roを拡張補正した補正分布範囲Reを求める。この範囲Reが中心となるように検知エリアを設定する。
(もっと読む)
検知装置、及び、検知方法
【課題】車両の側方に搭載されたカメラが撮影した車外画像のみに基づいてカメラの光軸の位置ズレを簡易に検知できる技術を提供する。
【解決手段】車両と相対的に移動する物体の像の車外画像中の移動軌跡と基準となるラインとを比較してカメラの光軸の位置ズレを検知するため、検知装置はカメラの光軸の位置ズレを車外画像のみで簡易に検知することができる。
(もっと読む)
画像監視センサ
【課題】画像による監視空間の一部を検知空間とする人体センサを備えた画像監視装置において、画像上に表示する人体センサの検知エリアを精度良く特定する。
【解決手段】監視空間内での作業員が移動してウォークテストを行い、測定タイミングにおける画像内での人像の位置とセンサ部の検知信号の信号レベルとを対応付けた測定データを取得する。測定データにより与えられる特性150において、ピーク値Pmaxに対応する測定データを代表点として選択し、その人像位置Xpを作業員の移動速度に応じて補正して補正ピーク位置Xpcを求める。この補正ピーク位置Xpcが中心となるように検知エリアを設定する。
(もっと読む)
複合型センサ
【課題】画像センサとその監視空間の一部を検知空間とする人体センサとを備え、両センサの検知結果を統合判定して侵入異常を検知する複合型センサにおいて、両センサの検知エリアの位置関係が正確でないと異常判定の精度が低下する。
【解決手段】監視空間内での作業員が移動してウォークテストを行い、測定タイミングにおける画像内での人像の位置と空間センサ部の検知信号の信号レベルとを対応付けた測定データを取得する。測定データにより与えられる特性150において、ピーク値Pmaxに対応する測定データを代表点として選択し、その人像位置Xpを作業員の移動速度に応じて補正して補正ピーク位置Xpcを求める。この補正ピーク位置Xpcが中心となるように複合検知エリアを設定し、画像の残りを画像センサ単独の検知エリアと定める。
(もっと読む)
映像処理装置および方法
【課題】 監視カメラの映像では被写体の顔や人体としての特徴が検出しやすい方向に映るとは限らず、適切な追尾結果が得られるとは限らない。
【解決手段】 映像処理装置100は、映像から物体を検出する物体検出部102と、検出した物体を追尾する物体追尾部103と、軌跡管理部106と、映像から人体を検出する人体検出部104と、物体対応付部105とを有する。軌跡管理部106は、追尾した物体の軌跡を管理する。物体対応付部105は、物体検出部102により検出した物体と人体検出部104により検出した人体とを対応付け、軌跡管理部106は、追尾した物体が物体対応付部105により人体に対応付けられたことを管理する。
(もっと読む)
撮影妨害検知方法、妨害検知装置及び監視カメラシステム
【課題】 監視カメラで撮影された映像における物体の状態が予め定められた複数の条件を満たしているか否かを判定し、撮影妨害やいたずらの誤検知を防止可能な装置及び方法を提供する。
【解決手段】 監視カメラは、撮影した映像から物体の状態を検出し、検出された物体の状態が予め定められた複数の条件を満たしているか否かを判定する。そして、検出された物体の状態が予め定められた複数の条件を満たしていると判定された場合に、当該物体を撮影妨害の物体として検知し、検知結果を表示装置に送信する。
(もっと読む)
容疑者を識別して追跡するシステム及びその方法
【課題】本発明は、容疑者を識別して追跡するシステム及びその方法を提供することを目的とする。
【解決手段】本発明の容疑者を識別して追跡するシステムは、モニターされたエリアのイメージを受信する受信モジュールと、イメージから追跡目標を選択する選択モジュールと、モニターされたエリアにおける追跡目標の移動方向及び移動距離を計算する目標追跡モジュールと、前記計算結果によって制御コマンドを生成して、追跡目標が常にカメラの視角範囲内に位置するようにカメラを移動させ、追跡目標に赤外線を照射し、赤外線の強度変化によってパルス信号を生成し、パルス信号をデジタル信号に変換するコマンド生成モジュールと、デジタル信号の周波数が人の平常の心臓鼓動頻度範囲を超えると、追跡目標が容疑者であると判断する判断モジュールと、を備える。本発明は、容疑者を識別して追跡する方法も提供する。
(もっと読む)
電子内視鏡用プロセッサ及び電子内視鏡装置
【課題】短時間で確実に所望の静止画像を取得可能な電子内視鏡用プロセッサを提供する。
【解決手段】電子内視鏡用プロセッサが、第1及び第2の画像記憶手段と、画像データの差分値を求める動き検出手段と、制御手段とを有し、制御手段は、画像データを逐次ビデオ信号に変換し第1及び第2の画像記憶手段に差分値と共に逐次記憶させる第1のモードと、第1の画像記憶手段に記憶された画像データを出力すると共に生成される画像データを逐次第2の画像記憶手段に差分値と共に記憶させる第2のモードと、第2の画像記憶手段に記憶された画像データを出力すると共に生成される画像データを逐次第1の画像記憶手段に差分値と共に記憶させる第3のモードとのいずれかによって制御するものであり、第2及び第3のモードにおいては、差分値に基づいて、画像データを連続的に出力する第1再生モードから、画像データの一つを繰返し出力する第2再生モードに切り換える。
(もっと読む)
追尾装置および追尾方法
【課題】回路規模を大きくすることなく、動きベクトル検出の分解能以下の速度で被写体が移動している場合であっても被写体を追尾することが可能な追尾装置および追尾方法を提供する。
【解決手段】被写体を撮像し、フレーム画像を得る撮像素子13と、フレーム画像の内、追尾対象として設定された領域の画像を参照画像とし、この参照画像を記憶する第1の動き検出用メモリ41及び第2の動き検出用メモリ45と、現フレーム画像を評価画像として記憶するバッファメモリ41と、評価画像と隣接フレームの関係にある参照画像とに基づいて被写体の第1の動きを検出し、評価画像と離散フレームの関係にある参照画像とに基づいて被写体の第2の動きを検出する動きベクトル検出部47を有し、第1の動きが動きなしと検出し、第2の動きが動きありを検出した場合は、第2の動きの検出結果を動き量として判定する。
(もっと読む)
侵入物体検出装置
【課題】監視領域内に存在する植栽の前を移動する侵入物体を検出するとともに、植栽の揺れによる誤検出を抑制できる侵入物体検出装置を提供する。
【解決手段】侵入物体検出装置100は、監視領域を撮影した監視画像を取得する撮像部10と、監視領域に侵入物体が存在しない状況において監視領域を撮影した画像である背景画像と、植栽が撮像されている画像上の領域を示す植栽領域を記憶する記憶部20と、監視画像と背景画像の差分によって、輝度値が変化した変化領域を抽出する変化領域抽出手段31と、変化領域について、変化領域が植栽領域と重なっている場合に重なっていない場合より侵入物体らしさが低くなる侵入物体らしさの度合いを表す侵入物体属性値を算出し、侵入物体属性値に基づいて変化領域が侵入物体によるものか否かを判定する判定手段36を有する。
(もっと読む)
物体検出装置
【課題】走行する車両等から撮像された時系列画像に撮像された物体を、精度良く検出することができる物体検出装置を提供する。
【解決手段】物体検出装置100は、物体が撮像された時系列画像を取得する画像取得部110と、回帰直線により物体の動き量を最適化し、最適化した動き量に基づいて、物体が撮像された領域を時系列画像から抽出し、該領域の分布情報を出力する領域抽出部120と、領域の分布情報と時系列画像とを取得し、分布情報が表す領域を、時空間MRFによって物体毎に分割することにより、該領域に撮像された物体を検出する領域分割部140とを備える。
(もっと読む)
画像センサ
【課題】侵入物体よりも撮像部に近い位置に発生する外乱を侵入物体と誤判定することを抑制できる画像センサを提供する。
【解決手段】画像センサ100は、監視領域を撮影した監視画像を順次取得する撮像部10と、監視画像と背景画像から変化領域を抽出する変化領域抽出手段31と、変化領域が侵入物体の性質を持つ度合いを侵入物体属性値として算出する侵入物体属性値算出手段32と、変化領域が侵入物体以外の外乱である特定外乱の性質を持つ度合いを外乱属性値として算出する外乱属性値算出手段33と、外乱属性値の高い変化領域が所定時間内に所定頻度で重なって現れる領域を外乱領域として設定する外乱領域抽出手段35と、変化領域毎に変化領域が侵入物体か特定外乱かを判定する判定手段36を有し、判定手段36は、変化領域が外乱領域に重なる割合が大きいほど侵入物体と判定し難くする。
(もっと読む)
目標追跡装置、目標追跡方法
【課題】目標追跡装置において、追跡目標が遮蔽物に遮蔽され、遮蔽物が追跡対象となっている場合における追跡目標の検出精度を高める。
【解決手段】追跡目標指定受付部と、追跡対象設定部と、撮像装置から連続して入力される入力画像内において、追跡対象設定部によって設定された追跡対象を、サイズ情報を含む検出情報を基準に検出して追跡する追跡処理部とを備え、追跡対象設定部は、入力画像内において追跡目標を認識した場合は、追跡目標を追跡対象として設定し、入力画像内において追跡目標が遮蔽物に遮蔽された場合は、遮蔽物を追跡対象として設定するとともに、遮蔽物と追跡目標とのサイズ比を取得し、追跡対象となっている遮蔽物の入力画像内でのサイズ変動と取得したサイズ比とに基づいて追跡目標の検出情報に含まれるサイズ情報を更新して、追跡目標の再出現を検出する。
(もっと読む)
不審対象検知システム、不審対象検知装置、不審対象検知方法及びプログラム
【課題】異なる特性を有する画像処理方法の結果を統合的に利用し、特にセキュリティレベルに応じた有効な不審者検知処理を行なうことができる不審者検知システムを提供することにある。
【解決手段】実施形態によれば、不審者検知システムは、監視範囲内の監視対象を撮影する複数のカメラと、前記各カメラから出力される映像を画像処理する手段であって、異なる検出特性を有する複数の画像処理部と、前記各画像処理部からの画像処理結果のいずれか、あるいは当該各画像処理結果を統合した統合処理結果を使用して前記監視対象の挙動を検知する検知部と、前記検知部から出力される挙動情報に基づいて、前記監視対象が不審者であるか否かを判定する判定部とを具備し、前記複数の画像処理部は、前記各カメラから出力される映像を単眼画像処理する単眼画像処理部と、前記各カメラから出力される映像をステレオ画像処理するステレオ画像処理部とを含む構成である。
(もっと読む)
目標追跡装置、目標追跡方法
【課題】目標追跡装置において、追跡目標が遮蔽物に遮蔽された後、さらに遮蔽物が重なった場合における追跡目標の追跡精度を高める。
【解決手段】追跡目標指定受付部と、追跡対象設定部と、入力画像内において、追跡対象設定部によって設定された追跡対象を追跡する追跡処理部とを備え、追跡対象設定部は、追跡目標を認識した場合は、追跡目標を追跡対象として設定し、追跡目標が遮蔽物に遮蔽された場合は、遮蔽物を追跡対象として設定し、追跡対象として設定されている遮蔽物が、他の遮蔽物と少なくとも一部が重なった場合は、それぞれの遮蔽物の動きベクトルと追跡目標の動きベクトルとの差に基づいて算出される各遮蔽物が追跡目標を遮蔽する推定遮蔽時間に基づき、その遮蔽物の重なり時点における残り時間が長い方の遮蔽物を追跡対象として設定する。
(もっと読む)
81 - 100 / 836
[ Back to top ]