
Fターム[5C054FD02]の内容
閉回路テレビジョンシステム (47,623) | 画像再構成処理 (1,375) | 三次元処理 (1,005) | 立体像;パノラマ画像 (203)
Fターム[5C054FD02]に分類される特許
1 - 20 / 203
画像処理装置及び画像処理方法
撮像装置、撮像方法およびプログラム
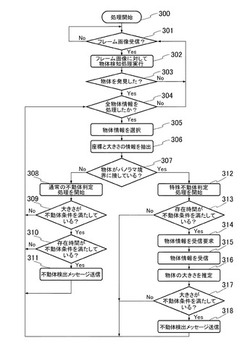
【課題】複数台の監視カメラの自律的な処理によって、パノラマ映像の境界に出現した物体が不動体であるか否かを判定する。
【解決手段】二つの監視カメラ21,22が取得する映像を合成してパノラマ映像を構築し、このパノラマ映像を用いて不動体を監視する監視装置であって、二つの監視カメラ21,22は物体を検出して物体情報を生成し、一方の監視カメラは、映像の外周に接する物体を検出した場合には、当該検出した物体の存在時間が不動体条件を満たすかを判定し、満たす場合には、他方の監視カメラ22が生成した物体情報を受信して一方のカメラ21自身が生成した物体情報と結合して新たな物体情報を生成し、生成した新たな物体情報を用いて物体の大きさが不動体条件を満たすかを判定する。
(もっと読む)
対象検知方法及び対象検知システム

【課題】本発明は、対象検知方法及び該方法が用いられる対象検知システムを提供する。
【解決手段】該方法は、同一シーンの深度図を撮像するとともに、撮像した深度図に基づいて該シーンの視差図を算出し、得られた視差図に基づいて前記シーンのV−視差図を取得し、V−視差図において道路に対応する斜線を検知するとともに、該斜線により視差図から道路を抽出することで、道路を含まないサブ視差図が得られ、V−視差図において縦線を検知し、前記サブ視差図から検知された各縦線に対応する全ての点を対象サブ視差図として抽出し、視差距離が所定値未満になり且つ重畳領域の比率が所定の閾値を超えた任意の対象サブ視差図同士の矩形フレームを1つの矩形フレーム対象領域に併合する。
(もっと読む)
障害物計測方法、障害物計測装置及び障害物計測システム
【課題】高速・低速に関わらず、単位時間あたりの演算量が一定になり、単位時間あたりの演算量の上限が規定され、ハード処理・ソフト処理のいずれにおいてもコストダウンを達成可能な障害物計測方法、障害物計測装置及び障害物計測システムを提供する。
【解決手段】この障害物計測方法は、走行物体から障害物までの距離をステレオカメラにより計測する際に、障害物計測の対象領域及びステレオカメラによる画像のフレームレートまたは解像度を走行物体の速度に応じて変化させる。
(もっと読む)
運転支援装置
【課題】立体表示された走行予想軌跡線の下枠線と上枠線の関係を直感的に判断することのできる運転支援装置を提供することを目的とする。
【解決手段】撮像装置7から入力された自車両外部の撮像画像に不揮発性メモリ4から読み出された自車両の立体的な走行予想軌跡線30を重畳して外部の表示装置12に出力する映像処理装置3と、ステアリングセンサ10から入力されたハンドル角度信号に基づいて、映像処理装置3が重畳する立体的な走行予想軌跡線30の向きを制御する制御手段5とを備え、走行予想軌跡線30は、立体の下面側を示す第1の軌跡線31と立体の上面側を示す第2の軌跡線32とを有し、かつ、立体側面33を第1の軌跡線31と前記第2の軌跡線32で挟まれた空間で構成し、制御装置5は、映像処理装置3に、走行予想軌跡線30の立体側面33の色の濃度を高さ方向に向けて段階的に変化させる。
(もっと読む)
画像生成装置
【課題】俯瞰画像に映し出された立体物の認識、特にその立体物の立ち位置を簡単に認識することができるモニタ表示画像を生成する画像生成装置の提供。
【解決手段】車両の周辺領域を撮影する車載カメラ1a,1b,1c,1dによって取得された撮影画像を上方仮想視点で射影変換することで俯瞰画像を生成する俯瞰画像生成部と、周辺領域に存在する立体物を認識して当該立体物の属性を示す立体物属性情報を出力する立体物検出部と、立体物属性情報に基づいて、立体物の接地位置を示す接地面マークを俯瞰画像における接地位置に画像合成することで、車両運転支援用のモニタ表示画像を生成する画像合成部と、
が備えられている。
(もっと読む)
情報処理装置、その処理方法及びプログラム
【課題】マスクの表示対象となる領域の設定をユーザが容易且つ確実に行なえるようにする。
【解決手段】情報処理装置は、画像の一部の領域をマスクするマスク合成部を有し複数の視点からの画像を撮像可能に構成される撮像装置に接続される。情報処理装置は、撮像装置が撮像可能な複数の視点のうちいずれかの視点で撮像される画像に対してマスク合成部によりマスクされる領域を所定のアルゴリズムに従って算出する算出手段と、算出手段により算出された領域に基づいて、複数の視点において撮像装置により撮像される画像内で常にマスクされる第1のマスク領域を算出する合成領域算出手段と、複数の視点のいずれかにおいて撮像装置により撮像された所定の画像に第1のマスク領域を合成する合成手段と、ユーザの指示に従って所定の画像においてマスクの表示対象となる領域を設定する際に、合成手段による合成後の画像を表示器に表示する表示制御手段とを具備する。
(もっと読む)
俯瞰画像表示装置
【課題】車両から離れるに従って対象物が伸びて太くなる変形画像が俯瞰画像に表示されてしまうことを防止すること。
【解決手段】俯瞰画像表示装置1の画像変換手段23は、撮影手段2〜5により撮影された画像を、変換データ記録手段24に記録される変換データ24a〜24dに基づいて、左側円柱投影面と、右側円柱投影面と、前側円柱投影面と、後側円柱投影面と、左前球体投影面と、右前球体投影面と、左後球体投影面と、右後球体投影面と、地面投影面とにより構成される俯瞰画像に変換し、表示手段7に表示させる。
(もっと読む)
ステレオカメラ及びステレオカメラの校正方法
【課題】障害物までの距離を測距するステレオカメラが取り付けられたガラスに歪みが発生しても、光軸のずれによる測距精度の低下を抑制する。
【解決手段】フロントガラス10の上部内面に、独立した左右一対のカメラ12L及び12Rを取り付けると共に、カメラ12L及び12Rの間に位置するフロントガラス10の内面に、歪み検出方向が異なるように配置された2つの歪みセンサ16及び18を取り付ける。そして、制御装置20は、歪みセンサ16及び18で検出した歪みA及びBと補正値とを関連付けた補正マップを参照し、カメラ12L及び12Rで撮像された一対の画像について、矩形領域の部分画像を切り出す位置を補正値だけずらすことで、光軸のずれを校正して測距精度の低下を抑制する。
(もっと読む)
作業機の周囲監視装置
【課題】作業機の周囲の状況を正確且つ良好な視認性で監視して、作業機の安全性や作業効率を向上させることを目的とする。
【解決手段】上部旋回体5に複数台が設けられ、そのうち2台が相互に視野範囲を部分的に重複するように設けた複数台のカメラと、各カメラで取得したカメラ画像に基づいて上方視点となるように視点変換した仮想視点画像を生成する視点変換部23と、視点変換部23が生成した複数の仮想視点画像をそれぞれに対応した表示領域に表示するように合成した合成画像を生成する画像合成部24と、合成画像を第1の画像として、各カメラのうち何れか1つのカメラが撮影している画像であり仮想視点画像間の境界線を視野内に含む画像を第2の画像として、第1の画像と第2の画像とを含む表示画像を生成する表示画像生成部25と、表示画像を画面上に表示するモニタ14と、を備えている。
(もっと読む)
車両周辺画像表示制御装置
【課題】実画像と履歴画像を合成して車両周辺画像をディスプレイに表示する車両周辺画像表示制御装置において、撮影画像の取得タイミングと車両移動量情報の取得タイミングが異なっている状況で、実画像と履歴画像のずれを従来よりも低減する。
【解決手段】車両周辺画像表示制御装置5は、時点t1において車両移動量情報を取得した場合、当該取得した車両移動量情報に基づいて、時点t1後に撮影画像を取得する予定の時点t11〜t13における車両移動量を推定し、時点t11〜t13のそれぞれにおいて撮影画像を取得すると、今回取得した撮影画像に基づく画像を実画像とし、また、時点t1に推定された現時点t11〜t13における予想移動量に基づいて、時点t11〜t13における車両と周囲の実際の位置関係に合致するよう、過去の撮影画像から履歴画像を作成し、この履歴画像を実画像と合成して表示する。
(もっと読む)
画像校正システム、画像校正方法及び撮像システム
【課題】外部の計測装置を用いずに、複数の撮像装置のずれ角を検出しそれぞれの画像のずれを校正する。
【解決手段】複数の撮像装置Ciが搭載された移動体Mを回転させ、第1の角速度計測装置1により移動体Mの角速度を計測し、第2の角速度計測装置2により撮像装置Ciの角速度を計測し、角速度比較部3iにより移動体Mの角速度と撮像装置Ciの角速度とを比較して各撮像装置Ciのずれ角を算出し、算出したずれ角を画像の校正角として校正角記憶部4iに記憶し、撮像部Giで取得した画像を校正角記憶部4に記憶された校正角で回転させて、画像変換部5iで複数の撮像装置Ciそれぞれで取得した画像のずれを校正する。
(もっと読む)
周辺画像表示装置
【課題】
撮像される画像同士の位置関係と、さらに、撮像される物体と建設用機械の上部旋回体の方向または下部走行体の前進方向との位置関係と、に関する情報を的確に得ることができる周辺画像表示装置を提供することを目的とする。
【解決手段】
建設用機械の周囲を撮像し、表示手段3は、建設用機械を基準とした環状画像31と、パノラマ画像32と、パノラマ画像32の一部分を切り出した切出し画像33とを同時に表示し、切出し画像33の切出し位置を定める枠状画像A1,A2を環状画像31上及びパノラマ画像32上に重ねて表示させ、建設用機械の上部旋回体の方向を指示する上部旋回体指示画像311,321,331と、下部走行体の前進方向を示す前進方向指示画像313,323,333と、を少なくとも環状画像31またはパノラマ画像32または切出し画像33のいずれかに表示させる。
(もっと読む)
車輌用映像表示装置
【課題】立体映像による状況認識性能の向上を図ることが可能な車輌用映像表示装置を提供する。
【解決手段】車輌用映像表示装置10は、自動車1に搭載され、自動車1の周囲を撮像するカメラ21,22と、カメラ21,22により撮像された映像を立体映像として表示する3Dモニタ30と、自動車1の運転シーンを推定するシーン推定部62と、運転シーンに基づいて3Dモニタ30に表示する立体映像の奥行き度を調整する奥行き度調整部63と、を備えている。
(もっと読む)
画像生成装置
【課題】認識された立体物と、当該立体物の撮影画像である立体物画像の領域に合成される代替画像との視認性を高めること。
【解決手段】画像生成装置であって、車両の周辺領域に存在する立体物を認識して当該立体物の属性を示す立体物属性情報を出力し、立体物属性情報に含まれている位置情報に基づいて撮影画像における立体物の画像領域である立体物画像領域を決定し、立体物属性情報に含まれている色情報に基づく色で色付けられた立体物の代替画像を、立体物属性情報に含まれている種別情報に基づいて出力し、立体物画像領域の位置に代替画像出力部から出力された代替画像が合成されている代替画像付き俯瞰画像を生成する画像合成部を備えている。
(もっと読む)
作業車両の周辺監視装置
【課題】俯瞰画像において作業車両の近くに位置する物体を容易に認識することができる作業車両の周辺監視装置を提供する。
【解決手段】作業車両の周辺監視装置において、第1撮像部は、作業車両の周囲の第1領域を撮像して第1画像データを得る。俯瞰画像作成部は、第1画像データを所定の仮想投影面31に投影することにより、作業車両の周囲の俯瞰画像を作成する。仮想投影面31は、作業車両に近づくほど地面からの高さが高くなる形状を含む。
(もっと読む)
作業車両の周辺監視装置
【課題】車体と車体周辺の物体との位置関係をカメラ画像上で容易に判断可能な周辺監視装置を提供する。
【解決手段】周辺監視装置10は、カメラ画像と、カメラ画像上の地面に垂直投影される車体(ベッセル4を含む)の外縁を示す車体外縁線BLと、をモニタ30に表示させる表示制御部40を備える。
(もっと読む)
パノラマ画像の生成装置、及び生成方法
【課題】撮像範囲が長辺と短辺で構成される撮像部を用いた場合に、広い視野範囲のパノラマ画像が得られるようにする。
【解決手段】撮像範囲が長辺と短辺で構成される撮像部の撮像方向を制御してパノラマ画像を生成する生成クライアントのコマンド生成部は、撮像範囲の回転のため回転機構を、パノラマ画像の生成のために制御し、生成クライアントの画像合成部は、回転機構を制御して得られる複数の撮像画像からパノラマ画像を生成する。
(もっと読む)
トンネル壁面の展開画像取得システム
【課題】トンネル壁面の展開画像を取得するシステムについて、得られた立体視可能な展開画像が現実の壁面の状態を正確に反映できるようにし、その反映の度合いを簡単に判定できるようにする。
【解決手段】システム10は、トンネルを走行する車両11と、車両11に搭載されたビデオカメラ12と、各ビデオカメラ12が撮像した画像データを処理可能な画像処理部13とからなる。画像処理部13は、画像データの各コマ上の第1および第2ラインから短冊形の第1および第2視差画像をサンプリングし、両ラインの中間から短冊形の直視画像をサンプリングする。各画像を横方向に配列してカメラ12ごとに第1および第2視差連続画像、直視連続画像を合成する。各連続画像を縦方向に配列して、第1および第2視差展開画像、直視展開画像を合成する。第1および第2視差展開画像を赤または青の着色画像として出力して立体視可能とする。これとフルカラー画像として出力した直視展開画像を比較可能とする。
(もっと読む)
画像表示システム、画像表示装置、及び、画像表示方法
【課題】車両が移動する可能性のある位置を示す予測進路をユーザへ提供することを目的とする技術に関する。
【解決手段】
ステアリングホイールの操舵角に基づいて導出された車両の予測進路と、ステアリングホイールの操舵角および予測進路に誤差を生じさせる要因の程度に基づいて導出された車両の予測進路との間隔である予測進路の範囲を導出する。これにより、車両の進行に伴って車両の通過する可能性のある位置をユーザが認識できる。
(もっと読む)
1 - 20 / 203
[ Back to top ]