
Fターム[5C054FD03]の内容
閉回路テレビジョンシステム (47,623) | 画像再構成処理 (1,375) | 三次元処理 (1,005) | 座標変換 (695)
Fターム[5C054FD03]に分類される特許
1 - 20 / 695
画像処理装置、車両、画像処理方法、及び、プログラム
駐車支援装置
画像間差分装置および画像間差分方法
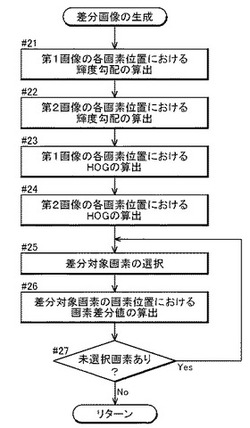
【課題】外乱の影響を受け難いロバストな画像間差分技術を提供する。
【解決手段】勾配方向算出部14aは、画像を構成する各々の画素の画素位置における画素値の勾配方向を求める。ヒストグラム生成部14bは、各々の画素を対象画素として設定するとともに、対象画素の周囲にヒストグラム算出領域を設定し、ヒストグラム算出領域に含まれる画素の画素位置における勾配方向の度数分布を対象画素の画素位置におけるヒストグラムとして生成する。画素差分部14cは、第1の画像の差分対象画素の画素位置におけるヒストグラムと、第2の画像の比較対象画素の画素位置におけるヒストグラムと、の差分値を差分対象画素と比較対象画素との画素差分値として算出する。画像差分部14は、差分対象画素の画素位置における画素値を画素差分値に基づいて設定することにより差分画像を生成する。
(もっと読む)
俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置

【課題】撮像画像を俯瞰画像に変換する変換パラメータを簡易に調整できる俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置を提供する。
【解決手段】俯瞰変換部23が、画像を射影変換により俯瞰画像に変換する俯瞰パラメータを記憶する俯瞰パラメータ記憶部25から読み出した俯瞰パラメータを用いて、カメラ10により撮像された撮像画像を俯瞰画像に変換し、間隔指標算出部24bが、等間隔のパターンの標示が撮像された撮像画像を変換した俯瞰画像上で標示のパターンの間隔が揃う度合を示す間隔指標値を算出し、俯瞰パラメータ算出部24cが、算出された間隔指標値に基づいて、俯瞰画像上で標示のパターンの間隔が所定の範囲内で揃う俯瞰パラメータを算出して俯瞰パラメータ記憶部25に記憶する。
(もっと読む)
車両周辺撮影装置および車両周辺画像の処理方法
【課題】高精度に車両周辺の障害物を検出することができる車両周辺撮影技術を提供する。
【解決手段】車両の周辺の情景を撮影する第1カメラと、第1カメラの撮影範囲と部分的に重複する撮影範囲を撮影する第2カメラと、が車両に搭載されている。第1カメラと第2カメラとの一方を主カメラとするとともに他方を副カメラとし、主カメラにより撮影された画像を主撮影画像とするとともに副カメラにより撮影された画像を副撮影画像とする。視点変換部13は、副撮影画像を主カメラの視点位置から撮影された画像に視点変換した視点変換画像を生成する。画像差分部14は、比較情報として主撮影画像と視点変換画像との差分画像を生成する。
(もっと読む)
車両周辺監視用画像生成装置
【課題】魚眼レンズのような広角レンズを用いた撮影画像であっても、車両周辺監視に適したモニタ表示画像を作成することができる画像生成装置の提供。
【解決手段】広角レンズを装着した車載カメラ1によって取得された車両周辺の撮影画像を入力する画像入力部51と、撮影画像の横方向に延びる歪み補正基線によって上下方向で区分けされた撮影画像領域に対して個別に、広角レンズの縦方向のレンズ歪みを補正する画素単位の歪み補正量の強度を設定する補正強度設定部55と、補正強度設定部55によって設定された歪み補正強度に基づいて撮影画像に対する歪み補正を実行する歪み補正実行部54と、歪み補正実行部54によって補正された撮影画像からモニタ表示画像を出力するモニタ表示画像出力部58とが備えられている。
(もっと読む)
運転支援装置
【課題】ドアの開放による自車の外形輪郭の変化にも対応可能で、運転者からの死角領域の発生も抑制される、俯瞰画像表示タイプの運転支援装置を提供する。
【解決手段】車両の周辺領域を撮影する車載カメラによって取得された撮影画像を上方仮想視点で射影変換することで撮影俯瞰画像を生成する俯瞰画像生成部と、車体を示す車体俯瞰画像を出力する車体画像出力部と、開放状態のドアを示すドア俯瞰画像における外側輪郭部以外の領域を透明化または半透明化した透明ドア俯瞰画像を出力するドア画像出力部と、撮影俯瞰画像と車体俯瞰画像と透明ドア俯瞰画像とが画像合成された運転支援画像をモニタ表示画像として生成する画像合成部とが備えられている。
(もっと読む)
3次元座標算出装置、3次元座標算出方法、及びプログラム
【課題】フレーム画像上の対象画像領域を代表する代表3次元座標の精度を向上させる。
【解決手段】3次元座標算出装置は、フレーム画像に撮像されている物体を含む対象画像領域内の前記物体の特徴点である複数の候補3次元点の3次元座標から、各候補3次元点に対するスコアを算出するスコア算出部と、前記候補3次元点の3次元座標と、該3次元座標に対する前記スコアとに対する統計処理を用いて前記対象画像領域を代表する点の3次元座標である代表3次元座標を算出する代表3次元座標算出部とを備える。
(もっと読む)
車両周辺監視装置
【課題】俯瞰画像上で全体が表示されていない目標物に対し、俯瞰画像上の境界線を変更し全体を表示できるようにした車両周辺監視装置を提供すること。
【解決手段】複数の撮像装置が互いに共通する視野領域とする俯瞰画像の共通領域に位置する障害物と判定された画像から抽出された複数の特徴点に対し、三次元計測処理部43において得られた相対運動情報による一定の経過時間を想定したときの予想軌跡と時刻変化をもとに、前記共通領域を互いに共通する視野領域とする各カメラについて“前記特徴点が写る/写らない”を予測しその予測結果を得る。そして、前記予測結果から、前記俯瞰画像の共通領域について、前記特徴点が抽出された障害物131をより広範囲に写すことの可能なカメラによる部分俯瞰画像を優先させ、フィードフォワード的に俯瞰画像の繋ぎ目、境界線を変更し、障害物131がより広範囲に俯瞰画像に表示されるようにする。
(もっと読む)
車両周辺監視装置
【課題】通常の俯瞰画像だけでなく、その部分拡大俯瞰画像もモニタ表示する際、それぞれの表示目的に適合した俯瞰画像が生成される車両周辺監視装置の提供。
【解決手段】車載カメラモジュールによって取得された撮影画像を元画像として二次平面射影変換によって第1俯瞰画像を生成する第1俯瞰画像生成部と、撮影画像を元画像として三次面射影変換によって第2俯瞰画像を生成する第2俯瞰画像生成部と、第1俯瞰画像からモニタ表示用の第1表示画像を生成するとともに、当該第1表示画像の所定領域に対応する第2俯瞰画像の所定領域から第1表示画像より大きな表示倍率を有するモニタ表示用の第2表示画像を生成する表示画像生成部とを備えている。
(もっと読む)
車載カメラ用画像補正方法および車載カメラ用画像補正プログラム
【課題】形状や寸法が既知の図形を用いることなく車載カメラの現在の取り付け角度を求めることができる車載カメラ用画像補正方法および車載カメラ用画像補正プログラムを提供する。
【解決手段】車載カメラ用画像補正方法は、車両に取り付けられたカメラが車両の周囲を撮像するステップS1と、カメラにより撮像された画像内の路面画像にもとづいて動きベクトルを検出するステップS5と、検出された動きベクトルを、真上視点の動きベクトルとなるように車両の進行方向軸、路面法線方向軸ならびに進行方向軸および路面法線方向軸に直交する路面平行方向軸の3軸の各軸周りに独立に回転補正させるための式である真上視点の動きベクトルへの変換式を作成するステップS6と、真上視点の動きベクトルへの変換式からカメラの車両に対する取り付け角度を求めるステップS7と、を有する。
(もっと読む)
画像表示装置、画像表示システム、画像表示方法、及び画像表示プログラム
【課題】被写体の位置関係を容易に把握できる画像表示装置、画像表示システム、画像表示方法又は画像表示プログラムを提供する。
【解決手段】座標情報算出部は画像信号が表す被写体の座標情報を算出し、撮影画像合成部は前記座標情報算出部が算出した座標情報に基づいて前記入力された画像信号をある視点からの画像を表す合成撮影画像信号を生成し、干渉判定部は前記撮影画像合成部が生成した合成撮影画像信号と予め定めた被写体を表す基準画像信号とが干渉するか否かを判定し、視点更新部は前記干渉判定部が前記合成撮影画像信号と前記基準画像信号が干渉すると判定した場合、前記視点を更新する。
(もっと読む)
画像生成方法、画像生成装置、及び操作支援システム
【課題】旋回動作可能な被操作体に取り付けられる撮像手段が撮像する入力画像に基づいて生成される出力画像を見易く表示する画像生成装置を提供すること。
【解決手段】旋回動作可能な上部旋回体63に取り付けられたカメラ2が撮像する入力画像に基づいて出力画像を生成する画像生成装置100は、上部旋回体63の旋回状態を検出する旋回状態検出手段120と、上部旋回体63のCG画像70を出力画像上に重畳表示するCG画像表示制御手段121と、出力画像の更新状態を制御する出力画像更新制御手段122と、を備え、旋回状態検出手段120が旋回の開始を検出した場合に、CG画像表示制御手段121はCG画像70を出力画像上で旋回させる。
(もっと読む)
撮像装置、監視カメラ、およびカメラ画面のマスク方法
【課題】パン回転、チルト回転、ズームによって変形したカメラ画面上のプライバシ保護のためのマスク範囲を正確に算出する。
【解決手段】撮像装置10に備わるマイコン120において、マスク2次元3次元変換部154は、ズーム位置に応じた焦点距離を3次元座標のうちの1つの軸(例えば、Z軸)上に採って、撮像素子104の仕様によって決まる撮像面20(長方形)の2次元位置を3次元座標で表す。そして、マスク表示位置算出部165は、パン・チルト・ズーム後の3次元座標上の撮像面20上のマスク位置をカメラ画面21(長方形)の2次元位置に変換する際に、撮像面20のサイズとカメラ画面21のサイズとが相似であることを利用して、撮像面20およびカメラ画面21の3つの頂点からの距離を用いて、カメラ画面21の2次元上のマスク位置を算出する。
(もっと読む)
運転支援装置
【課題】運転者が車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができる運転支援装置を提供する。
【解決手段】運転支援装置100は、車両の周辺状況と当該車両の状態とに応じて画像を切り替えて表示する運転支援装置であって、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態でない場合に、当該車両の後方画像を表示する画面表示切換器9及び画面表示器10を備える。これにより、当該車両がイグニッションオン状態後の最初の前進走行状態でなく即ち駐車中から前方へ出発する状態でない場合、且つ、当該車両の周辺に物体が検出された場合、後方画像を表示させるための操作を運転者が行うことなく、後方画像を適切に表示させることが可能になる。
(もっと読む)
車両周辺表示装置
【課題】 本発明は、ユーザによる手動操作を必要とすることなく、表示装置に表示されるカメラ映像の視点を変更することができる車両周辺表示装置の提供を目的とする。
【解決手段】 本発明は、車両周辺をカメラにて撮影し、前記カメラからのカメラ映像を車室内の表示装置に表示する車両周辺表示装置において、運転者の着座姿勢に応じて、カメラ映像の視点を変更することを特徴とする。
(もっと読む)
車外映像提供システム
【課題】車外映像を利用した車室内における高品質なAR表示を実現することができる「車外映像提供システム」を提供すること。
【解決手段】車載機3は、携帯端末2から、カメラ5の向きに関する情報を含む端末情報を取得する端末情報取得手段11と、端末情報に対応した車載カメラ4および撮影領域中の部位を特定する車載カメラ/撮影領域部位特定手段12と、これによって特定されたカメラ4の撮影映像から、特定された撮影領域中の部位に該当する映像部位を切り出す映像部位切り出し手段14と、切り出された映像部位に対して、提供すべき車外映像の生成に必要な画像処理を行う画像処理手段15と、車両上の撮影障害物を含まないAR表示映像を生成する提供映像生成手段16とを備えたこと。
(もっと読む)
動画提示装置
【課題】歪曲広角画像上で任意の追跡対象物を自動追跡する。
【解決手段】魚眼撮影した歪曲広角画像Sを、メモリ130内にフレーム単位で入力する。変換部150は、格納部170内の切出条件に基づき、歪曲画像Sの点Pの位置から、φで示される向きに、サイズmの画像を切り出し、正則画像Tに変換してメモリ140に格納する。追跡開始点Qを含む追跡開始指示が与えられると、フラグ設定部220はフラグをONにし、点Qが新たな点Pになるよう更新する。基準色抽出部200は、新たな点Pの近傍色を基準色αとして抽出し、基準色格納部190に格納する。近隣ブロック抽出部160は、点Pの近傍ブロックを抽出し、ブロック選択部180は、基準色αに近似する画素数が最大となるブロックを選択する。自動変更部210は、選択ブロック内の基準色αに最も適合する色をもつ候補領域の中心点を新たな点Pとする更新を行う。
(もっと読む)
カメラ制御装置、カメラ制御方法及びカメラ制御プログラム
【課題】直感的にカメラの撮像方向を指示することのできるカメラ制御装置を提供する。
【解決手段】受信部101は、カメラの撮像画像の画像データと、カメラの撮像方向の水平方向の角度データとを受信する。記憶部105は、カメラアイコンデータと、地図データと、カメラ位置データとを記憶する。第1の合成部106は、地図上のカメラ位置にカメラアイコンを合成し、第2の合成部106は、カメラアイコンを基準として受信部で受信した角度データに応じた方向に、撮像画像を合成する。表示部107は、合成した画像を表示する。操作部108は、表示部107が表示した撮像画像に対する移動の操作を受け付ける。検出部104は、撮像画像に対する移動の操作を検出する。指示部105は、移動の操作のカメラアイコンに対する移動角度に応じてカメラにパンの駆動の指示を行う。
(もっと読む)
車両周辺監視システム
【課題】複数の撮影画像から生成される俯瞰画像の重複領域に現れる物体の撮影方向に関する運転者の理解を容易にする車両周辺監視システムの提供。
【解決手段】部分的に重複させた撮影による複数の撮影画像から生成された俯瞰画像セグメントを、互いの重複領域を重ね合わせるように組み合わせて表示用俯瞰画像を生成する。俯瞰画像における重複領域に重複する撮影画像の境界領域を表す境界指標を付与した境界付き俯瞰画像が表示された後に、俯瞰画像における重複領域に予め設定された融合関係で融合して得られた融合重複画像を用いた融合俯瞰画像が表示される。
(もっと読む)
1 - 20 / 695
[ Back to top ]