
Fターム[5C054FE12]の内容
閉回路テレビジョンシステム (47,623) | 特殊表示 (4,983) | 複数映像の同時表示 (2,371) | 重畳表示 (1,482)
Fターム[5C054FE12]の下位に属するFターム
解析映像との重畳表示 (302)
資料映像との重畳表示 (256)
TV放送信号との重畳表示 (6)
メッセージ、クロックの重畳表示 (478)
Fターム[5C054FE12]に分類される特許
121 - 140 / 440
映像表示装置及び映像表示方法
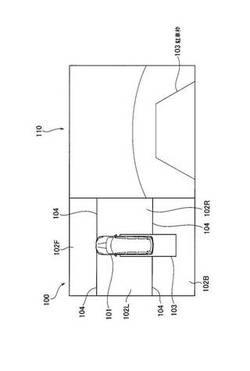
【課題】俯瞰映像を表示させる場合であっても、当該俯瞰映像における障害物との相対位置と、実際の障害物との相対位置との相違を同一画面上で確認させる。
【解決手段】車両周囲の異なる方向を撮像方向とした複数のカメラから取得した、画像変換が行われていない複数の直接映像110を用いて、車両周囲の状況を運転者に提示するために、映像処理部により、複数の直接映像110を取得し、当該複数の直接映像110を用いて車両周囲を一覧させる俯瞰映像100を作成し、障害物検知部によって自車両に近接する障害物を検知した時に、制御部によって、俯瞰映像100と、障害物の自車両に対する方向を撮像した直接映像110とを同時に表示させる。
(もっと読む)
車両周辺監視装置

【課題】オプティカルフローによる画像処理を用いることなく、撮影画像から移動物体を検出し、その移動物体の存在を運転者が容易に気づくことができる車両周辺監視装置を提供する。
【解決手段】自車両に搭載され、自車両外部の周辺を撮影する撮影装置と、撮影装置にて撮影された撮影画像における検出ラインを設定し、検出ラインに沿って移動する移動物体の移動に伴って生じる検出ライン上の画素の明るさの変化を検出する検出手段と、検出手段により検出された結果に応じて、情報表示を生成する生成手段とを有する制御装置と、撮影画像及び情報表示を表示する表示装置とを備える車両周辺監視装置。
(もっと読む)
映像監視装置
【課題】遠近感のある監視対象領域を、重複領域を持つ二つの画像として捉え、合成画面上での遠近感を解消するとともに、二つの画像情報を漏れなく表示できる合成画像を作成するとともに表示部に表示する映像監視装置を提供する。
【解決手段】監視カメラ3bで撮った奥行き側画像を取り込んで縮小させて合成画像上での配置を決定する奥行き側画像変換部4b、監視カメラ3aで撮った手前側画像を取り込んで、奥行き側画像と重なる重複部、重ならない非重複部にエリア分割し、重複部を拡大するとともに、非重複部を縮小する手前側画像変換部4a、変換した手前側、奥行き側画像を取り込んで、被写体の大きさと位置を揃えて重ね合わせ、合成画像を得る画像合成処理部4cよりなる画像処理部4を映像監視装置100に設ける。
(もっと読む)
車両周辺映像表示装置
【課題】一部の撮像画像に影が含まれていることによる合成画像全体の輝度低下を防ぐことができる車両周辺映像表示装置を提供する。
【解決手段】車両周辺を撮像する各カメラ1a〜1dによる複数の撮像画像に基づいて生成された単一の合成画像に影が含まれているか否かを判定し、影が含まれていると判定した場合には合成画像を構成する複数の撮像画像の中から影が含まれている画像を特定する影判定部15と、影判定部15が影が含まれている画像を特定した場合、影が含まれている画像を除いた残りの撮像画像の平均輝度に基づいて撮像画像毎の輝度を調整する調整部5a〜5dと、輝度の調整が行われた後の撮像画像に基づいて生成された合成画像を表示する表示手段3と、を有する。
(もっと読む)
運転支援装置
【課題】車両の所定位置に固定された撮像手段により車両周囲を撮像した画像を使用して、運転者にとってより視認性の良好な運転支援画像を表示する運転支援装置を提供する。
【解決手段】撮像手段1で撮像した車両の後方周囲画像から仮想視点画像と後方視点画像とを作成し、仮想視点画像の一部からなる近距離画像と後方視点画像の一部からなる遠距離画像とが上下に表示されるよう画面合成し運転支援画像として表示手段3に表示する。表示手段3における近距離画像と遠距離画像との画像境界を、表示手段3の中央部に対し両端部を上側に移動可能としたことにより、近距離画像の画面中央部より画面両端部の画面範囲を広くすることができる。従って、運転者が運転動作を行っている際に、車両周囲に存在する障害物をいち早く認識できるため、運転者にとって使用感の良い運転支援画像を提供することができる。
(もっと読む)
狭路走行支援装置
【課題】自車両前方の障害物が自車両側方付近に移動する際の自車両と障害物との連続的な相対位置関係を、運転者に容易かつ即座に把握させることができる狭路走行支援装置を提供する。
【解決手段】自車両前方の領域を表示する第一の表示画像10を作成する第一の表示画像作成部と、自車両の左右側面17,16の領域を表示する第二の表示画像15を作成する第二の表示画像作成部と、第一の表示画像10の下方または車両進行方向後方に第二の表示画像15を並べて配置すると共に、第二の表示画像15に表示される自車両の左右側面17,16の車幅方向端部から自車両の進行方向前方に延びる左右自車幅相当延長線14,13を第一の表示画像10と第二の表示画像15とに連続して表示する画像合成部と、を備えた。
(もっと読む)
画像情報提供装置および画像情報提供方法
【課題】提供される画像情報から、ユーザが車両に生じている異常を容易に認識するができるように画像情報を作成する。
【解決手段】カメラ11a〜11dから出力される画像がマッピングされた三次元空間のモデルSMを視点変換することにより、車両周囲画像を作成する。視点変換を行う際には、車両Caに生じている異常の検出結果に基づいて、車両周囲画像に車両Caに生じている異常が含まれるように仮想視点の計算を行う。
(もっと読む)
監視画像表示制御装置及び監視システム
【課題】監視範囲全体の領域を把握しながら注目すべき領域を確認することができるよう
にする。
【解決手段】監視範囲の全体領域を撮像する第1カメラから出力される全体画像撮像信号
と全体領域の中の注目領域を撮像する第2カメラC2から出力される注目領域撮像信号と
を入力し、全体領域に対応する全体画像の中に注目領域に対応する注目画像を挿入可能な
ブランキング部が生成された全体画像撮像信号を第1プロジェクターに送信するとともに
注目領域撮像信号を第2プロジェクターに送信する監視画像表示制御装置500であって
、第2カメラの撮像方向を設定する第2カメラ撮像方向設定信号及び第2カメラのズーム
値を設定する第2カメラズーム信号を出力する機能を有する撮像及び表示制御部510と
、第2カメラ撮像方向設定信号及び第2カメラズーム信号に基づいて全体画像にブランキ
ング信号を生成する表示画像信号生成部520とを備える。
(もっと読む)
制御装置、カメラシステム及びプログラム
【課題】表示されている画像に対応するカメラが制御可能であるかを確実に認識できるとともに、表示されている画像が全体画像のどの範囲に位置するかを確実に認識すること。
【解決手段】カメラ端末装置200で撮像されたパノラマ画像を表示するパノラマ画像表示領域と、パノラマ画像で指定された位置に対応する領域を拡大して拡大画像を表示する拡大画像表示領域と、を表示するように制御する表示処理部305と、パノラマ画像上で指定された位置に対応する領域をカメラ端末装置200で撮像するように制御する制御部310と、を有し、表示処理部305は、制御部310による制御が可能か否かに応じて前記全体画像の表示状態を変更する、センターサーバー300が提供される。
(もっと読む)
車載照明装置、画像処理装置、画像表示システム及び照明方法
【課題】車両の周辺の撮影を補助する照明に係る消費電力を低減できる技術を提供する。
【解決手段】画像表示システム120では、ディスプレイ21に表示される画像に含まれる車両の周辺の領域に応じて、複数の光源60のそれぞれの光量を個別に調整する。このため、必要となる一部の光源60の光量のみを増加させることができる。したがって、複数の光源60の全てを最大の光量で常に発光させる必要が無いため、消費電力を低減できる。
(もっと読む)
車両周辺監視装置
【課題】俯瞰画像をモニタに表示する有効性を損なうことなく障害物の位置をモニタで把握可能な装置を構成する。
【解決手段】複数のカメラの撮影画像から俯瞰画像生成手段が俯瞰画像を生成し、この俯瞰画像がモニタ21の副表示領域21Bに表示される。車両の近傍に存在する障害物Xを障害物検出部が検出した場合には、特定情報出力手段は、障害物Xが存在する俯瞰画像の分割領域D2の外側の枠状部F2を強調表示する。この強調表示が行われている状況において副表示領域21Bに指等を接触させることで、障害物Xが撮影されている画像が副表示領域21Bに拡大表示される。
(もっと読む)
車両周辺表示装置
【課題】画像の視認によって障害物の存在を分かり易く伝えることができる車両周辺表示装置の提供。
【解決手段】車両90の後方領域93の画像1を液晶ディスプレイ80に表示する車両後方表示装置100において、後方領域93を撮影し障害物画像7を含む後方画像3を生成するカメラ60及びデコーダ70と、障害物97を検出し車両90から当該障害物97までの距離BDを演算する複数のソナー20r,20c,20l及び演算装置10と、障害物画像7に対応する障害物97の存在を警告する警報画像5を、後方画像3に重畳することにより、液晶ディスプレイ80に表示される画像1を描画する描画装置40と、を備える。警報画像5は、上下方向の長さが予め固定された枠状の枠画像部5aと、枠画像部5a内に描画され、障害物97までの距離が縮小するほど上下方向における長さが縮小する距離表示画像部6と、を含む。
(もっと読む)
運搬車両の後方視界表示システム
【課題】 カメラ画像から排土作業時に停止すべき位置を正確に把握できるようにする。
【解決手段】 運搬車両の車体後端または後輪タイヤ後端を路面に投影した位置あるいは該投影した位置から後方へ所定距離離れた路面上の位置に、ベッセルの積荷を排土する排土作業時に基準となる排土作業時距離目安線あるいは排土作業時距離目安点を設定し、該排土作業時距離目安線あるいは排土作業時距離目安点を、表示部に表示される画像に、重ね合わせて表示する。
(もっと読む)
映像表示装置および映像表示方法
【課題】被写体に関連する関連情報を被写体の映像に重畳表示する映像表示装置において、被写体と関連情報との表示位置の乖離を抑制する。
【解決手段】映像表示装置100は、映像データサーバ装置200が供給する、被写体の映像および時間情報を含む映像データを取得する映像データ取得部103と、メタデータサーバ装置300が供給する、時間情報を含み、被写体に関連するメタデータを取得するメタデータ取得部101と、メタデータから生成された、被写体に関連する関連情報を、被写体の映像に重畳した重畳映像を生成するオーバレイ部104と、メタデータに含まれる時間情報と映像データに含まれる時間情報とに基づいて、メタデータサーバ装置300に対してメタデータの供給の遅れをフィードバックする乖離度情報を生成し、被写体のメタデータを供給したメタデータサーバ装置300に送る乖離度算出部とを備える。
(もっと読む)
車両周辺監視装置
【課題】画面を注視せずに、瞬時に車両周辺の注意対象の確認ができ、運転者が主体的に運転操作を行うことが可能な車両周辺監視装置を提供する。
【解決手段】車両を駐車する際に車両周辺を監視する車両周辺監視装置に、車両に搭載された撮影装置12により撮影された車両の周辺画像を取得する画像取得部2と、駐車過程において複数の注意対象を周辺画像に設定する注意対象設定部5と、複数の注意対象から駐車過程に応じた注意対象を逐次切換えて注視点とし、当該注視点を中央に位置させる表示画像を生成する表示画像生成部6と、注視点と運転者との間に存在する車両の少なくとも輪郭線を半透明画像として生成する半透明画像生成部7と、表示画像に半透明画像を重畳させて車室内の表示装置20に表示させる表示制御部3と、を備える。
(もっと読む)
カメラキャリブレーション装置
【課題】駐車場の白線の2つの特徴点を検出し、特徴点とその交差する2方向の情報をもとに画像の位置合わせを行うキャリブレーション装置を提供する。
【解決手段】車両に搭載した複数のカメラを有する撮像部と、各カメラで撮影した画像から駐車枠を示す直線画像を識別し夫々のカメラ画像から駐車枠の特徴点を少なくとも2つ検出する特徴点検出部と、検出した特徴点とその交差する2方向の情報をもとに各カメラの画像を合成して真上からの視点に変換した俯瞰画像を生成する視点変換部と、俯瞰画像から車両と直線画像との境界位置を判別して車両画像の表示枠を決定し、俯瞰画像に対する表示枠の割合及び位置が予め指定した値になるように俯瞰画像を変更する調整部と、変更した俯瞰画像をもとに計算された各カメラの特性を示すカメラパラメータを格納する記憶部とを具備する。
(もっと読む)
車両周辺障害物検出装置
【課題】障害物を検出する各センサにおいて、障害物検出処理が困難な環境条件に対して適合的に調整を行い、安定性の高い障害物の検出を実現する。
【解決手段】処理パラメータを参照して、超音波により障害物のセンシングを行う超音波センサ101と、処理パラメータを参照して、センサ出力値に基づいて障害物の情報を検出する超音波信号処理部102と、処理パラメータを参照して、障害物の映像を撮影するカメラ103と、処理パラメータを参照して、撮影された映像に基づいて障害物の情報を検出する映像処理部104と、超音波信号処理部102により検出された障害物の情報と映像処理部104により検出された障害物の情報とを統合して映像を生成する障害物統合検出部105と、生成された映像を表示する表示装置106と、障害物の情報に基づいて、処理パラメータを調整するパラメータ調整部109とを備えた。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の画像を適切に表示することで車両の運転操作を簡単かつ円滑に行う上で有利な車両周辺監視装置を提供する。
【解決手段】画像手投影手段32は、各カメラ12、14、16、18から得られた撮像画像を車両2の周囲にわたって延在する仮想的な3次元の立体面からなる画像投影面50に投影する。視点変換画像生成手段38は、画像手投影手段32によって画像投影面50に投影された投影画像を視点変換処理することによって、指定された箇所に位置する仮想的な視点Pから指定された方向Dで投影画像を見ることによって得られる視点変換画像を生成する。視点変換画像は、モニタ32の表示画面に表示される。視点位置方向決定手段44は、運転状況検出手段40の検出結果と、接近物体検出手段42の検出結果とに基づいて、仮想的な視点Pの位置および方向Dを決定する。
(もっと読む)
画像比較方法および画像比較プログラム
【目的】本発明は、画像比較方法および画像比較プログラムに関し、実画像上のパターンと元CADデータのパターンとの比較を容易に行うと共に、同じようなパターンの幅のものが複数存在してもその対応関係を実画像上で容易に判別可能にすることを目的とする。
【構成】試料を撮影した実画像からパターンを構成するライン、スペースのエッジを抽出するステップと、抽出したライン、スペースのエッジをもとにライン、スペースの幅、長さのいずれか一方あるいは両者に対応するエッジ間の距離を測定するステップと、測定したライン、スペースのエッジ間の幅および長さのいずれか一方あるいは両方に、実画像のライン、スペースと元のCADデータから生成したCAD画像のライン、スペースとのいずれか一方あるいは両者の比からなる補正係数を演算して補正CAD画像を生成するステップと、生成した補正CAD画像を実画像に重畳して表示するステップとを有する。
(もっと読む)
画像合成装置、及び、画像合成方法
【課題】車両搭載の複数のカメラ画像を合成した合成画像を看やすくすることができる技術を提供する。
【解決手段】車両に搭載される複数の画像を合成する画像合成装置は、夫々異なる方角へ向けて車両外側に搭載された複数の撮像手段から複数の画像を入力し、入力した複数の画像の輝度に基づいて複数の画像のうちの一画像を代表の画像として決定し、代表の画像を基準にして他の画像の輝度を調整するとともに、代表の画像と輝度が調整された他の画像とを車両の周辺の様子を示す一の車両周辺画像に合成するので、輝度のムラが少なく、一枚の車両周辺画像として看者に違和感を持たせることを防ぐことができる。
(もっと読む)
121 - 140 / 440
[ Back to top ]