
Fターム[5C054FE12]の内容
閉回路テレビジョンシステム (47,623) | 特殊表示 (4,983) | 複数映像の同時表示 (2,371) | 重畳表示 (1,482)
Fターム[5C054FE12]の下位に属するFターム
解析映像との重畳表示 (302)
資料映像との重畳表示 (256)
TV放送信号との重畳表示 (6)
メッセージ、クロックの重畳表示 (478)
Fターム[5C054FE12]に分類される特許
161 - 180 / 440
外界認識装置
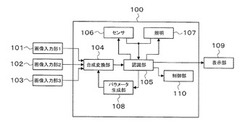
【課題】処理負荷の低減と検出精度の向上を図ることができる外界認識装置を提供する。
【解決手段】車両10に設置された複数のカメラ201〜203で撮像される車両周囲の画像を利用して認識対象Pを認識する外界認識装置は、入力されるパラメータに応じて、前記各画像の座標変換と合成を行い、合成画像を作成する合成変換部104と、合成変換部104で作成された合成画像に対して画像処理を行い、認識対象を認識する認識部と105と、認識部105によって認識された認識結果に基づいてパラメータを生成するパラメータ生成部108を有する。
(もっと読む)
車両用周辺監視装置および車両用周辺画像表示方法

【課題】車両用周辺監視装置において、複数の異なる方向を撮像した画像の明るさを補正して1枚の画像に合成した画像と、前記複数の異なる方向を撮像した画像とを合成して表示したとき、前者の画像の明るさ補正の影響によらずに、後者の画像を見やすくする。
【解決手段】車両周辺を撮像する複数の撮像手段と、前記複数の撮像手段のうちいずれか1つの撮像手段で撮像された画像の中から、前記画像の明るさに対応した値を算出し、算出された値に基づいて、前記複数の撮像手段で得られた画像の明るさを補正し、明るさが補正された画像に対して所定の座標変換を施した後、1枚の画像に合成し、前記いずれか1つの撮像手段で撮像された画像と同時に表示する。
(もっと読む)
車両用画像表示装置
【課題】ミラー画像を表示したときに現実の映像と誤認しないように区分して表示することができる車両用画像表示装置を提供する。
【解決手段】複数のカメラを含み車両の周囲を撮影可能な撮像部と、車両の俯瞰画像を生成する俯瞰画像生成部と、複数のカメラで撮影した画像を処理して車両の背景画像を生成し、背景画像と俯瞰画像を合成した第1の画像を出力する第1の画像生成部と、車両の後部又は前方部の背景画像付近の自車両の進行方向に対して垂直かつ地面に対して垂直な面を基準に、第1の画像を面対称させた画像を形成するとともに面対称であることを識別可能にした第2の画像を生成する第2の画像生成部と、第1の画像及び第2の画像を選択的に合成する画像合成部と、画像合成部からの出力画像を表示可能な表示部と、を具備する。
(もっと読む)
周辺表示装置
【課題】自動車などの自走可能な移動体周辺の俯瞰画像を表示する周辺表示装置において、計算コストを削減した周辺表示装置を提供する。
【解決手段】3次元データ処理部DPは、ステレオカメラで得られた2次元測定画像から、3次元画像データを算出する3次元化計算部11と、3次元化計算部11で計算された3次元画像データに含まれる各データが道路面を構成するデータであるか否かを判定する道路面判定部12と、道路面判定部12で道路面を構成するデータであると判定されたデータを全て破棄、あるいは間引きして道路面に該当しないデータとともに出力する道路面データ削減部13と、自動車座標系内でのステレオカメラの位置、姿勢を表現する3次元変換行列を適用することで、ステレオカメラ座標系で表現された3次元画像データを自動車座標系で表現された3次元画像データに変換する座標変換部14とを備えている。
(もっと読む)
車両用死角映像表示システムと車両用死角映像表示方法
【課題】半透明車室内映像を透過して運転者の視点位置からの死角映像を見せるシステムであるとのユーザー理解を促すことで、死角解消による安全運転への寄与を、実効性を持たせて実現することができる車両用死角映像表示システムと車両用死角映像表示方法を提供すること。
【解決手段】サイドカメラ1と外部モニター2と画像処理コントロールユニット3と、を備えたシースルーサイドビューモニターシステムA1において、画像処理コントロールユニット3は、サイドカメラ1から入力される実カメラ映像信号を運転者の視点位置から見た死角画像に視点変換する周囲映像画像変形部33と、運転者の視点位置から見た車室内画像を形成する車体画像形成部34と、半透明車室内画像を透過して死角画像を見せる透過表示画像を生成する画像合成装置36と、車室内画像の中から次第に浮かび上がってくる死角画像を見せるアニメーション表示画像を生成する画像合成装置36と、を有する。
(もっと読む)
車載用画像表示装置および画像のトリミング方法
【課題】合成された画像上で後方車両を見易く表示することができる車載用画像表示装置を提供する。
【解決手段】車載用画像表示装置は、自車の車幅方向の中央部から自車の後方を撮像する撮像カメラ102と、自車のサイドミラーに設置され自車の後方を撮像する撮像カメラ104、106と、撮像カメラ102〜106で撮像された画像データを合成して後方画像を生成する出力制御部116と、後方画像を表示するディスプレイ118と、自車の後方車両を検出するセンサー112とを有する。出力制御部116は、検出された後方車両の位置に応じて画像データが合成される境界を可変する。
(もっと読む)
家具シミュレーション方法、装置、プログラム、記録媒体
【課題】本発明の課題は、家具を撮影した後にカメラの内部パラメーターを校正することで、室内実写画像に違和感のない家具CG画像を重畳できる家具シミュレーション方法を提供することである。
【解決手段】操作者が、(1)デジタルカメラで、標準マーカーを置いた室内を撮影するステップと、(2)室内を撮影した時と同じ焦点距離を設定したデジタルカメラで、校正パターンを撮影するステップと、家具シミュレーション装置が、(1)校正パターン撮影画像から、カメラ内部パラメーターを導出するステップと、(2)室内撮影画像の標準マーカー画像にカメラ内部パラメーターを適用して、三次元正射影変換関係式を導出するステップと、(3)家具モデルデータに三次元正射影変換関係式を適用して、家具CG画像データを生成して、室内撮影画像データに重畳して表示するステップと、を含んだ手順でなされることを特徴とする家具シミュレーション方法である。
(もっと読む)
映像処理システム及び映像処理方法
【課題】躍動感及び臨場感に満ちた合成映像を提供可能とし、顧客の満足度を十分に向上させることができる映像処理システムを提供すること。
【解決手段】映像処理システム1Aは、被写体90を撮影して被写体映像データを出力する撮影装置10と、撮影装置10の動作内容を示す動作データと、動作データが示す動作内容と連動した映像からなる背景映像データとを通信ネットワーク80を介して配信する配信装置20Aと、通信ネットワーク80を介して配信された背景映像データと、撮影装置10から得られた被写体映像データとの合成処理を行うとともに、合成処理により得られた合成映像データを表示装置40上に表示させる合成再生装置30とを備え、撮影装置10は、配信装置20Aにより配信された動作データに従って被写体90を撮影する。
(もっと読む)
車両周辺映像を用いた車線離脱感知方法および装置
【課題】走行中の車両周辺の死角地帯をなくし、複数のカメラにより撮像される重複領域を自然に表示されるように補正処理することによって、車線離脱の有無をより正確に感知することができる。
【解決手段】本発明による車両周辺映像を用いた車線離脱感知方法は、走行中の車両に設置された複数のカメラを通じて撮像された映像をカメラに連結されるそれぞれのチャンネルを通じて入力を受ける段階、撮像映像をトップビュー形態に補正処理して複数の補正映像を生成する段階、複数の補正映像を合成して車両の周辺映像を生成する段階、車両の周辺映像から車線を抽出し、車両と抽出された車線との距離情報、または車両の進行方向と抽出された車線とがなす角度情報を算出して車線離脱を判断する段階、および車線離脱と判断される場合には警報を発生する段階を含む。
(もっと読む)
情報処理装置、その動作方法及びプログラム
【課題】 遠隔会議システムにおいて、高精細に出力されたくない画像も高精細な画像として出力される場合がある。そこで、本発明は、高精細に出力されたくない画像の出力を制限することを目的とする。
【解決手段】 撮像された画像を取得し、前記画像に含まれる注目領域と、該注目領域以外の領域を判定し、前記注目領域の大きさが閾値以上であるか否か判断し、前記注目領域の大きさが閾値未満であるときには、前記注目領域及び前記注目領域以外の領域に対して前記画像を出力し、前記注目領域の大きさが閾値以上であるときには、前記注目領域に対して出力する画像を変更すると共に、前記注目領域以外の領域には取得された前記画像を出力する。
(もっと読む)
運転支援装置
【課題】車両から見て障害物の後側となる領域を撮像して取得した情報をあらかじめ提示可能な運転支援装置を提供する。
【解決手段】機載ECU21は、飛行ユニット20が自車両Aの進行方向に自車両Aから離間して飛行するように制御する。さらに、機載ECU21は、機載カメラ28が自車両Aの走行路W1(進行予定経路)を撮像するように制御する。車載ECU11は、機載カメラ28が撮像した画像に応じた画像を車載モニタ17に表示する。
(もっと読む)
画像処理装置
【構成】カメラC_1〜C_4のうちカメラC_3およびC_4に注目したとき、カメラC_3およびC_4は、共通視野VW_34を部分的に有し、かつ路面に対して斜めに交差する方向の被写界を捉える。CPUは、カメラC_3およびC_4からそれぞれ出力された被写界像P_3およびP_4を取り込み、路面の上方から被写界を捉えた状態を表す鳥瞰画像を取り込まれた被写界像P_3およびP_4に基づいて作成する。CPUはまた、共通視野VW_34に障害物が存在するとき、鳥瞰画像上の障害物画像の姿勢を、カメラC_3およびC_4と障害物との位置関係に基づいて調整する。
【効果】共通視野VW_34における障害物の再現性が向上する。
(もっと読む)
車載カメラの校正装置
【課題】校正環境に依存されることなく、簡単な構成で、校正の合否の判定を早期に確実に行うことのできる車載カメラの校正装置を提供する。
【解決手段】カメラ座標系の射影面である撮影画像において校正指標80の中のそれぞれの校正点Qを検出するための画像処理を実施する画像処理対象領域を設定する画像処理対象領域設定部と、撮影画像の画像処理対象領域において校正指標80の中のそれぞれの校正点Qを検出する校正点検出部と、検出された校正点Qに基づいて、基準座標系に対してカメラ座標系を規定するカメラパラメータを自動調整する調整部と、画像処理対象領域をグラフィック画像による領域枠Fとして撮影画像に重畳させて表示部に表示させる表示制御部とを備える。
(もっと読む)
カメラ校正装置
【課題】ホモグラフィを用いたカメラ校正において、必要な数の校正指標を撮影画像の中から簡単かつ正確に求める技術を提供する。
【解決手段】第1平面Πにおける近傍領域Πsに配置された4つの近傍校正指標M1、M2、M3、M4及び遠方領域Πwに配置された少なくとも1つの遠方校正指標M5、M6と含む撮影画像を取得し、撮影画像における近傍校正指標の座標位置を算定座標位置として算定し、近傍校正指標の実座標位置と算定座標位置とから算定された予備ホモグラフィH1を用いて撮影画像における遠方校正指標の存在位置を推定する。推定された存在位置を用いて算定された遠方校正指標の算定座標位置と近傍指標の算定座標位置及びこれらに対応する実座標位置とから撮影画像面と第1平面との間の精密ホモグラフィH2を算定する。
(もっと読む)
映像確認装置、その方法、及びプログラム
【課題】監視カメラの映像において一連の動きがある時間帯のフレームを所定間隔で重畳して一のフレームを生成する映像確認装置等を提供する。
【解決手段】撮影時刻の異なる複数のフレームを有する撮像情報を格納し、格納された撮像情報において、任意の一のフレームと当該任意の一のフレームとは異なる撮影時刻のフレーム、又は予め撮像された背景フレームとを比較して画素値に相違がある領域を検出し、検出した画素領域を差分領域として抽出する差分抽出部320と、差分領域を検出した開始フレームから、前記差分領域の変化が連続して検出されている検出区間のフレームを重畳して一のフレームを生成する重畳部330とを備える。
(もっと読む)
画像処理装置
【課題】切り替え前後の画像間で同一の物体を容易に対応付けられるようにする。
【解決手段】車両1を上方から俯瞰する視点及び撮影方向の仮想画像から、車両1の公報を写す仮想画像にモニタの表示内容を切り換える際に、車両1の上方から屋根部分1aにズームインする動画と、屋根部分1aから車両1の後方にズームアウトする動画とをモニタに表示させる。そして、両動画の間に、モニタの画面全体に車両1の屋根部分1aをアップで写す仮想画像を挿入してモニタに表示させる。挿入する屋根部分1aの仮想画像は、モニタの画面の中央を通る任意の対称軸を境として線対称な画像とする。
(もっと読む)
車幅線調整方法、車載カメラ装置及びプログラム
【課題】車載カメラ装置において、撮影した画像に重畳して表示する2本の線幅線の調整の簡単化を実現する。
【解決手段】撮像素子で撮像した画像に車幅の目安を示す2本の車幅線を重畳し、表示装置にて表示させる車載カメラ装置において、この2本の車幅線の角度および幅を連動して調整するようにする。具体的には、車幅線の始点のX座標と終点のX座標とを異なるステップ量で更新することにより、2本の車幅線の角度および幅を連動して調整する。また、操作部上のボタン押下の度に、車幅線の始点のX座標と終点のX座標をそれぞれ異なる所定のステップ量ずつ更新する。さらに、車幅線のX座標の値により、更新するステップ量を変更する。
(もっと読む)
車載カメラ校正システム、車載カメラ制御装置、設備制御装置、車載カメラ校正方法
【課題】より精度の高い校正を行うことができる車載カメラ校正システム、車載カメラ制御装置、設備制御装置、車載カメラ校正方法を提供する。
【解決手段】車載カメラ校正システム1は、設備側に設置された校正指標8の位置情報を記憶する記憶手段3aと、車両に搭載された車載カメラ2の校正を車載カメラ2の撮像した画像内に位置する校正指標8と位置情報に基づいて行う校正手段3bと、校正指標8の現在位置情報を測定する校正指標測定手段7と、位置情報を現在位置情報に基づいて修正する修正手段3cを備えることを特徴とする。
(もっと読む)
車両周辺監視装置
【課題】隣接する映像間のつなぎ目に二重写りが生じることを抑えながら、近景と遠景の連続的な車両周囲映像を生成することができる車両周辺監視装置を提供すること。
【解決手段】前後左右のカメラ1,2,3,4により取得された複数の画像データを1つの画像に合成処理し、1つの合成画像をモニタ8の画面上に映し出すアラウンドビューモニタシステムにおいて、車両周辺の近景を複数の縦割り領域にて撮影する前後左右のカメラ1,2,3,4に、前後左右のカメラ1,2,3,4の画角を包含する広い画角にて車両周囲の遠景を撮影する全周囲カメラ5を加え、画像処理コントローラ7は、全周囲カメラ5によって撮影した遠景カメラ画像にとって死角となる領域を近景カメラ画像領域として設定し、1つの遠景カメラ画像と複数の近景カメラ画像を組み合わせることで、1つの合成画像を生成する。
(もっと読む)
白線検出装置
【課題】演算量を低減させることができ、かつ、誤検出を防止することができる白線検出装置を提供する。
【解決手段】カメラ1による撮像画像を俯瞰処理部2が俯瞰画像に変換し、俯瞰画像は区分線により複数の区画に区分されて表示部3に表示される。そして、複数の区画のうち一部の区画を選択する操作が選択操作部13に入力されると、切出し部14が、画像処理部4において画像処理が行われた後の画像全体から、選択された区画に対応した画像部分を切り出す。さらに、白線認識部9が、この画像部分について白線認識を行ない、テンプレート作成部10が認識された白線に基づいてテンプレートを作成し、テンプレートマッチング部11が画像全体についてテンプレートに表された白線に対して平行な白線の検出を行ない、検出白線出力部7により検出され白線が表示部3に表示される。
(もっと読む)
161 - 180 / 440
[ Back to top ]