
Fターム[5C054FE28]の内容
閉回路テレビジョンシステム (47,623) | 特殊表示 (4,983) | 警報情報の表示 (552)
Fターム[5C054FE28]に分類される特許
1 - 20 / 552
対象検知方法及び対象検知システム
【課題】本発明は、対象検知方法及び該方法が用いられる対象検知システムを提供する。
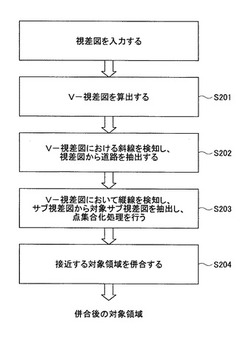
【解決手段】該方法は、同一シーンの深度図を撮像するとともに、撮像した深度図に基づいて該シーンの視差図を算出し、得られた視差図に基づいて前記シーンのV−視差図を取得し、V−視差図において道路に対応する斜線を検知するとともに、該斜線により視差図から道路を抽出することで、道路を含まないサブ視差図が得られ、V−視差図において縦線を検知し、前記サブ視差図から検知された各縦線に対応する全ての点を対象サブ視差図として抽出し、視差距離が所定値未満になり且つ重畳領域の比率が所定の閾値を超えた任意の対象サブ視差図同士の矩形フレームを1つの矩形フレーム対象領域に併合する。
(もっと読む)
車両周辺監視装置

【課題】 車両に搭載された赤外線カメラにより撮像した画像から監視しようとする対象物を認識し、認識した対象物を車両の運転者に提供する車両周辺監視装置の処理負荷を軽減する。
【解決手段】認識処理部102は、画像に含まれる複数種別の物体(車両、人工構造物、又は歩行者等の対象物)毎に個別認識処理{車両形状認識処理(ステップS13)、人工構造物形状認識処理(ステップS19)、対象物認識処理(ステップS25)}を実行する。除外継続時間設定部106は、前記個別認識処理の結果、認識された物体の画像領域に対して、前記物体の種別に応じて、前記認識処理の効果を継続する除外継続時間T1、T2、T3を設定する。除外継続時間T1、T2、T3が設定された前記画像領域については、解除残時間T1′、T2′、T3′となるまで、当該物体の個別認識処理を行わないようにしたので、処理負荷を軽減することができる。
(もっと読む)
内視鏡装置、内視鏡装置の制御方法、およびプログラム
【課題】計測精度の低下を低減することができる内視鏡装置、内視鏡装置の制御方法、およびプログラムを提供する。
【解決手段】先端部21は、光学系によって領域S1に結像される2つの像のうちのいずれか一方の像のみが結像されるように光路を切り替える切替部25と、領域S1に結像された第1の像に基づく第1画像および領域S1に結像された第2の像に基づく第2画像を生成する撮像素子22とを有する。制御部30は、撮像素子22に複数枚の第1画像を生成させると共に、複数枚の第1画像に基づいて、ぶれの有無を判定した後、撮像素子22に第2画像を生成させる。続いて、制御部30は、撮像素子22に第1画像を生成させると共に、第2画像の生成の前および後に生成された第1画像に基づいて、ぶれの有無を判定する。制御部30は、2回のぶれの有無の判定で、ぶれがないと判定した場合に、計測部31に計測を行わせる。
(もっと読む)
監視装置
【課題】 効率的に異常の確認を行うことのできる監視装置を提供する。
【解決手段】 監視装置4は、監視手段(監視カメラ2や画像記録装置3)が設置された複数の監視領域における異常状態を遠隔から監視する。監視装置4には、異常が検知された監視手段の識別情報と、異常検知時刻及び異常種別を示す異常情報と、異常情報の確認フラグと、を対応付けた異常管理テーブルが記憶されている。監視装置4は、操作部9から確認操作入力があったときに、記憶部12の異常管理テーブルから未確認の異常情報を抽出し、未確認の異常が生じている一の監視手段についての全ての未確認の異常情報を表示部8に表示する。そして、操作部9からの確認操作入力に基づいて、表示された未確認の異常情報の確認フラグを未確認から確認済みへと変更する。
(もっと読む)
情報出力装置、検知装置、プログラム及び情報出力方法
【課題】種々の誤検知発生要因に対応することが可能な情報出力装置、検知装置、プログラム及び情報出力方法を提供する。
【解決手段】被写体を撮影した画像に関する情報を出力する情報出力装置であって、前記画像を1又は複数の画像エリアに分割する分割手段と、撮影時間の異なる複数の前記画像から当該画像間の差分となる特徴量を前記画像エリア毎に算出する特徴量算出手段と、前記特徴量算出手段で算出された各画像エリアの特徴量に基づいて、前記特徴量に変化のある画像エリアを検知する画像エリア検知手段と、前記画像を構成する各画像エリアから、前記被写体のおかれる環境に応じて定まる条件に該当する画像エリアを特定する特定手段と、前記検知手段が検知した画像エリアから前記特定手段にて特定された画像エリアを除いた画像エリアに関する情報を出力する出力手段と、を備える。
(もっと読む)
車両周辺監視装置
【課題】画像から検知された監視対象物の存否及び位置を極めて容易に把握可能な車両周辺監視装置を提供する。
【解決手段】第1表示部(26)と、第2表示部(28)と、1つのサブ領域(74、76、78)から2以上の監視対象物(H1〜H3)が検知されたか否かを判別する検知数判別部(52)とを備える。検知したと判別された場合、第2表示部(28)は、2以上の監視対象物(H1〜H3)が存在する旨を示す第1モード、及び2以上の監視対象物が存在する位置を示す第2モードに順次切り替えて各マーク(94、96、98、100)を表示する。
(もっと読む)
警告表示方法および警告表示プログラム
【課題】グルーピングの枠移動を精度よく予測し、より正確に危険物の存在を車両の運転者に警告する警告表示方法および警告表示プログラムを提供する。
【解決手段】警告表示方法は撮像した車両周囲の画像から特徴量を検出するステップと、検出した特徴量にもとづいて、同一の属性を持つ特徴量をグルーピングするステップと、グルーピングされた画像領域に含まれる物体画像の車両に対する危険度を示す信用度を設定するステップと、信用度が所定の高さ以上であると、運転者が視認可能な位置に設けられた表示装置に対して警告表示を行うステップと、グルーピングされた画像領域の次フレームにおける位置を、グルーピングされた画像領域を構成する画素の2フレーム前の画像と1フレーム前の画像間の動きベクトルの平均と1フレーム前の画像と現在のフレームの画像間の動きベクトルの平均とにもとづいて算出した加速度を用いて予測するステップとを有する。
(もっと読む)
映像解析装置及びシステム
【課題】 多様な動的物体が現れるシーンを高速に解析する映像解析装置を提供する。
【解決手段】 入力された映像のフレーム画像102から、動的な物体が存在する領域を検出する動的物体領域検出部103と、この検出された動的物体領域検出部で検出された物体のカテゴリを判別する物体カテゴリ判別部104とを有し、この物体領域と物体カテゴリ判別部で判別されたカテゴリから、映像中の各座標において物体が現れる確率を表す「存在確率マップ」を生成し、それを時系列データで保存することで、一定のタイムスパンにおける各カテゴリの存在確率マップを生成する。
(もっと読む)
車両周辺監視装置
【課題】物体が存在しない場所で、誤ってオプティカルフローを検出することのない車両周辺監視装置を提供する。
【解決手段】カメラ(撮像手段)100で異なる時刻に撮像した2つの画像に基づいて、オプティカルフロー検出手段240が第1のオプティカルフロー(F1)を検出し、オプティカルフロー推定手段230が、仮想面設定手段220によって路面から所定距離だけ高い位置に設定された第1の仮想面の上に生じる第2のオプティカルフロー(F2)を推定して、オプティカルフロー差分演算手段250が、F1からF2を差し引いて、物体検出手段260が、差分演算結果に基づいて車両の周辺に存在する物体を検出し、接触判定手段270が、物体が車両10に接触する可能性があると判定したときに、警報出力手段400が警報を出力する。
(もっと読む)
車両周辺監視装置
【課題】画像から検出された監視対象物の存否及び位置を極めて容易に把握可能な車両周辺監視装置を提供する。
【解決手段】車両周辺監視装置(10)は、撮像画像(IL)に基づいて監視対象物を検出する対象物検出部(60)と、撮像画像(IL)内における前記監視対象物の位置を算出する位置算出部(66)と、前記監視対象物までの距離を算出する距離算出部と(64)、撮像画像(IL)を汎用ディスプレイ(26)に表示させるとともに、前記監視対象物を強調表示させる第1表示制御部(72)と、前記監視対象物の撮像画像(IL)内における位置に対応する表示位置で、該監視対象物をシンボル化したマークをMID(28)に表示させる第2表示制御部(74)とを備え、第2表示制御部(74)は、前記監視対象物の撮像画像(IL)内における位置及び該監視対象物までの距離に応じて、ブレーキを促す旨及び回避方向のどちらか一方を表示させる。
(もっと読む)
車載用動画像データ記録装置
【課題】従来の車載用動画像圧縮装置においては、事故発生前後の車両周辺状況を撮影した高画質の動画像データが得られないという課題があった。
【解決手段】車両周辺画像を撮影するカメラ部101と、カメラ部101が撮影した画像を通常画質で圧縮する通常画質符号化部102と、通常画質符号化部102が出力する動画像データを記録する通常画質データ記憶部103と、車両走行時に発生した異常状況など何らかのトリガを検出するトリガ検出部104と、カメラ部101が撮影した画像を高画質で圧縮する高画質符号化部105と、トリガ検出部104でのトリガ検出タイミングから一定時間前に撮影された高画質符号化部105が出力する動画像データを記録する高画質データ記憶部106を具備する車載用動画像データ記録装置により、通常走行時は通常画質記録により記憶メモリの有効利用ができ、かつ、事故発生直前直後は高画質の動画像データを得ることができる。
(もっと読む)
画像監視装置およびプログラム
【課題】画像データを受信中の画像出力装置に対応する他の画像出力装置に対して早期に状態の問合せを行うことのできる画像監視装置を提供する。
【解決手段】画像監視装置4は、複数の画像出力装置と通信が可能であり、それらの画像出力装置の間の対応関係を示す対応情報を記憶している。この画像監視装置4は、複数の画像出力装置に対して状態情報の送信を要求する状態要求信号の送信順を示す巡回情報を生成し、また、複数の画像出力装置から画像データを受信中のカメラの抽出を行い、対応情報に基づいて画像データを受信中のカメラに対応する他の画像出力装置について状態要求信号の送信順を示す早期巡回情報を生成する。そして、巡回情報に基づいて複数の画像出力装置に対して状態要求信号を順次送信するとともに、早期巡回情報に基づいて他の画像出力装置に対して状態要求信号を送信する問合せ制御を行う。
(もっと読む)
車両周辺監視装置
【課題】単眼カメラによる距離検出と単眼カメラ以外の構成による距離検出とを切替えて、車両周囲の対象物の位置を追跡するときに、対象物の距離検出の信頼性が低下することを防止した車両周辺監視装置を提供する。
【解決手段】単眼距離検出部11による検出距離が切替距離以下になった後は、ステレオ距離検出部12により車両1と対象物間の距離を検出して対象物の位置を追跡し、走行状況検知部15により検知されている車両1の走行状況が、単眼距離検出部11による距離検出精度を低下させるおそれがある精度低下懸念状況であるときは、切替距離hを、精度低下懸念状況でないときよりも長く設定する対象物位置追跡部13を備える。
(もっと読む)
車両周辺監視装置
【課題】ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる機能を備えた車両周辺監視装置を提供する。
【解決手段】車両周辺監視装置は、所定の制御周期毎に、車両に搭載されたカメラによる撮像画像を取得し、今回の制御周期での撮像画像の前回の制御周期からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値を算出し、今回の撮像画像に対して、ピッチング補正値による補正を行った補正画像を生成し、補正画像から対象物を検出する。変位量は、撮像画像から、地平線より上側の所定領域、地平線を含み地平線より下側から上側までの所定領域、又は自車両から所定距離内の先行車両を含む所定領域を監視領域として切出し、今回の制御周期における撮像画像の監視領域と前回の制御周期における撮像画像の監視領域間で求める。
(もっと読む)
車両運転支援装置、車両が走行する道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、楕円偏光が優勢な実際の道路環境においても正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】車両の車軸方向(または車両の高さ方向)に2つの偏光カメラを配置して偏光画像撮像系を構築した上で、車軸方向の偏光成分の光強度(H)および当該車両の高さ方向の偏光成分の光強度(V)から算出される偏光状態特徴量を、画像において対をなす画素毎に比較し、その差分が所定の閾値を超える場合に、これを路肩として検出する。検出された路肩の位置情報に基づいて、操舵制御手段、走行速度制御手段および警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
画像処理装置、画像処理システム、カメラ、カメラシステム
【課題】表示画面内の対象物の存在を認識しやすい画像を提供し、危険予知を容易にすることができる画像処理装置、画像処理システム、カメラ、カメラシステム等を提供すること。
【解決手段】画像処理装置100は、赤外線画像データを取得する画像取得部110と、画像取得部110により取得された赤外線画像データに基づく画像領域に対して、画像領域内での対象物を検出する画像処理を行うアラート表示領域と、画像領域内での対象物を検出する画像処理を行わないアラート非表示領域とを設定する領域設定部120と、アラート表示領域の赤外線画像データに基づいて、アラート表示領域における対象物の検出情報を含むアラート表示の画像処理を行ってアラート表示を含む表示用画像データを生成する処理部130とを含む。領域設定部120は、境界線を用いて画像領域を区画する設定パターンを決定し、境界線の位置及び形状のうちの少なくとも一つを定める。
(もっと読む)
画像処理装置、画像処理システム、カメラ及びカメラシステム
【課題】対象物を効率良く検出することができる画像処理装置、画像処理システム、カメラ及びカメラシステム等を提供すること。
【解決手段】画像処理装置100は、赤外線画像データを取得する画像取得部110と、画像取得部110により取得された赤外線画像データに基づく画像領域に対して、画像領域を複数の領域に分割する境界線を設定し、境界線によって分割された複数の領域のうちの少なくとも1つの領域を画素密度変更領域ARMDに設定する領域設定部120と、画素密度変更領域ARMDの赤外線画像データの画素密度を低減する処理を行い、画素密度変更領域ARMDを含む画像領域の赤外線画像データに基づいて対象物の検出処理を行い、検出処理の結果に基づいて表示用画像データを生成する処理部とを含む。
(もっと読む)
車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム
【課題】 駐車時に消費電力を抑制しつつ、車両の周囲の監視対象物の監視をすることが可能な車載カメラ制御装置等の提供。
【解決手段】 車載カメラ制御装置は、赤外線画像データと可視画像データを取得する画像取得部110と、走行モードと防犯モードとを含む複数の処理モードのうちのいずれかの処理モードを、使用処理モードとして設定するモード設定部130と、処理部120とを含む。処理部120は、使用処理モードとして走行モードが設定されている場合には、可視画像撮像部220を通常駆動状態に設定し、可視画像データと赤外線画像データとに基づいて、報知用データの生成処理を行い、使用処理モードとして防犯モードが設定されている場合には、可視画像撮像部220を、動作オフ状態又は通常駆動状態よりも消費電力が低い省電力状態に設定し、赤外線画像データに基づく監視対象物の検出処理を行う。
(もっと読む)
撮像装置及びこれを備えた物体検出装置、並びに、光学フィルタ及びその製造方法
【課題】光量が大きく異なっている複数の光源体をより短い時間間隔で連続して検出することを課題とする。
【解決手段】撮像領域内に存在する物体からの光を、光学フィルタを介して、受光素子(撮像画素a,b,c,・・・)が2次元配置された画素アレイで構成された画像センサにより受光することで、撮像領域内を撮像する撮像装置において、上記光学フィルタは、透過率が低い光透過領域(撮像画素b,d,e,gに対応したフィルタ領域)と透過率が高い光透過領域(撮像画素a,c,f,hに対応したフィルタ領域)が、撮像画素単位で、上記画素アレイの2次元方向へ交互に配置されている透過率調整層を有する。
(もっと読む)
車両接近物検知装置
【課題】車載カメラの撮影画像に対して画像認識処理を行って車両に接近する物体を検出する技術において、従来よりも画像認識処理の処理負荷を低減する。
【解決手段】車両1の作動状態を示す車両信号が、後退中を示している場合、範囲Aを物体検出範囲として選択し、停止を示している場合、範囲Bを物体検出範囲として選択し、ウインカが作動している場合、ウインカの方向に応じて範囲BまたはCを物体検出範囲として選択し、選択した物体検出範囲内に限定して画像認識処理を行うことで、車両1に接近する物体の検出を試みる。
(もっと読む)
1 - 20 / 552
[ Back to top ]