
Fターム[5C054GB11]の内容
閉回路テレビジョンシステム (47,623) | 記録内容 (2,580) | 資料映像 (641)
Fターム[5C054GB11]の下位に属するFターム
Fターム[5C054GB11]に分類される特許
1 - 20 / 98
監視装置
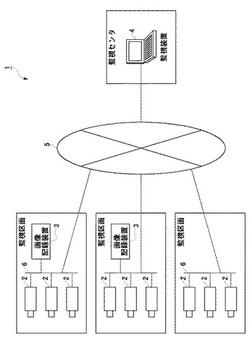
【課題】 予め設定された特定状態(例えば、異常発生中状態)にある監視手段の状況を容易に確認することのできる監視装置を提供する。
【解決手段】 監視装置4は、監視手段(監視カメラ2や画像記録装置3)が設置された複数の監視領域を含む監視区画を遠隔から監視する。この監視装置4では、監視区画を表示する第一表示工程と、第一表示工程で表示された監視区画が選択されたときに当該選択された監視区画に含まれる監視領域を表示する第二表示工程と、第二表示工程で表示された監視領域が選択されたときに当該監視領域の平面図を表示する第三表示工程とが実行される。第二表示工程では、選択された監視区画内に特定状態の監視手段がある場合には、当該監視手段が設置された監視領域のみが選択可能に表示され、選択された監視区画内に特定状態の監視手段がない場合には、全ての監視領域が選択可能に表示される。
(もっと読む)
監視装置、監視方法およびプログラム

【課題】画面表示された移動体の経路上の指定した場所から映像を再生する。
【解決手段】監視装置10は、移動体の動きを検出する動き検出部22と、検出した動きの特徴に基づいて検出ポイントを設定するとともに、その検出ポイントにおける移動体の位置と録画時刻とを含む経路情報を生成する経路生成部23とを備え、経路情報を参照して、検出ポイント間を結ぶ線を移動体の経路として表示装置130の画面上に表示する。さらに、監視装置10は、前記経路上の位置を指定する入力を受け付けて、指定された位置と検出ポイントとの位置関係に基づいて録画時刻を算出する時刻算出部25を備え、指定した位置に対応する録画時刻から映像を再生する。
(もっと読む)
映像監視装置、映像監視システム及び方法
【課題】地図上で映像とカメラの位置とをリアルタイムで監視できる映像監視装置を提供することにある。
【解決手段】本実施形態によれば、映像監視装置は、受信装置と、制御装置とを備えた構成である。受信装置は、ネットワークを介してカメラからマルチキャスト配信される映像情報と当該カメラの位置情報を受信する。制御装置は、前記受信装置により受信された映像情報と位置情報をマルチキャストアドレスに基づいてリアルタイムに対応付けて、対応付けられた前記各情報を地図情報に対応付ける連携処理を実行する。
(もっと読む)
監視範囲検知装置
【課題】携帯端末の位置や姿勢などに応じて画定される方向・範囲内に、監視装置の監視範囲が存在するか否かを検知可能とする。
【解決手段】撮像部と、撮像部の位置と光軸を取得する状態取得部と、監視場所を3次元仮想空間として表現した場所モデルと、監視装置の設置位置、監視方向及び監視角情報を場所モデルと対応付けた監視条件情報と、撮像部の位置、光軸及び画角を場所モデルと対応付けた撮像条件情報とを記憶した記憶部と、場所モデルと監視条件情報とから監視装置の監視範囲を表す監視範囲モデルを生成し、場所モデルと撮像条件情報とから撮像部の撮像範囲を表す撮像範囲モデルを生成するモデル生成手段と、監視範囲モデルと撮像範囲モデルとが交わっているときに撮像部の視野内に監視装置の監視範囲が含まれていると判定する判定手段と、判定手段による判定結果を表示する表示部と、を有することを特徴とする監視範囲検知装置。
(もっと読む)
広域撮影制御システム
【課題】航空機等により広域災害における画像収集を行う際に、災害が発生したと考えられる特定の場所を正確且つ迅速に複数回撮影することができる広域撮影制御システムを提供する。
【解決手段】飛しょう体に搭載され、上空から地上を撮影するカメラ1と、飛しょう体に搭載され、カメラ1により撮影された複数の画像データの各々に対して位置情報を関連付ける画像処理部21と、カメラ1により撮影された複数の画像データから選択した1以上の画像データに対してイベントフラグを付与するイベントフラグ付与部24と、イベントフラグ付与部24によりイベントフラグが付与された1以上の画像データに対して画像処理部21が関連付けた位置情報に基づいて、再撮影を行うための再撮影計画を生成する再撮影計画部26と、飛しょう体に搭載され、再撮影計画部26により生成された再撮影計画に基づいてカメラ1を制御する撮影制御部27とを備える。
(もっと読む)
情報提供装置、システム、方法及びプログラム
【課題】有用な情報提供サービスを実現できる情報提供装置が求められる。
【解決手段】本実施形態によれば、情報提供装置は、映像取得部と、画像認識部と、カメラ追尾制御部と、表示制御部とを備えた構成である。映像取得部は、カメラから目標物体の映像データを取得する。画像認識部は、前記映像データに基づいて指定された目標物体を認識する。カメラ追尾制御部は、前記画像認識結果に基づいて、前記カメラを前記指定の目標物体に追尾させる。表示制御部は、前記指定の目標物体に追尾している前記カメラから取得される映像データを表示装置に出力する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】画像内の物体を安定して追尾すること。
【解決手段】画像処理装置100は、追尾対象となる物体の複数の部分テンプレートと、テンプレート画像とを比較して、領域毎の相関値を算出する。画像処理装置100は、相関値に基づいて、部分テンプレートに類似する画像領域を仮説領域として抽出する。画像処理装置100は、複数の仮説領域を重複しないように組み合わせた全体仮説を生成し、相関値や誤差を基にして、全体仮説の評価値を算出する。画像処理装置100は、評価値を基にして、複数の全体仮説から最適な全体仮説を判定する。
(もっと読む)
監視映像表示装置
【課題】閲覧者が従来よりも正確に直感的な監視業務を行うことができる監視映像を表示する。
【解決手段】監視映像表示装置10は、撮影方向を制御可能で該撮影方向に応じて監視対象区域内を撮影する監視カメラ101からの映像を表示する映像表示手段16と、監視カメラ101の撮影方向情報を取得する機器状態情報取得手段14と、監視対象区域内の監視対象物の位置情報と付加情報を外部の他のシステム111から取得する付加情報取得手段12と、機器状態情報取得手段14で取得された監視カメラ101の撮影方向情報と付加情報取得手段12で取得された監視対象区域内の監視対象物の位置情報に基づき、監視カメラ101で撮影された映像内の監視対象物に付加情報を紐付け映像表示手段16の映像に重ねて表示する付加情報表示手段15とを備えた。
(もっと読む)
移動物体追跡装置
【課題】監視空間内の移動物体を時刻毎に生成した複数の予測位置に基づいて追跡する装置において、移動物体の現時刻での予測位置が監視空間内の障害物の領域に設定されると追跡精度が劣化する。
【解決手段】予測位置設定部は記憶部に記憶される過去の位置情報を用いて動き予測を行い、移動物体の現時刻における複数の予測位置を求める。その際、予測位置修正部53は、複数の予測位置のうちその移動元となる1時刻前の予測位置220との間に障害領域42aが存在する予測位置221を移動元位置から見て障害領域42aより手前の位置の予測位置241に修正する。物体位置算出部56は、修正された予測位置を含む複数の予測位置それぞれにて有する移動物体の画像特徴に基づいて、移動物体の現時刻における移動先位置を判定する。
(もっと読む)
通報装置
【課題】 重要監視物の近接位置に人物が存在するときの画像情報に人物の情報が不足するような場合であっても、処理負荷を増大させることなく当該人物が不審者であるか否か判定できる通報装置を提供する。
【解決手段】 保管庫が設置された監視空間において不審者を検出して通報する通報装置であって、前記保管庫の近接位置に人物の存在を検知する人物検知部と、周期的に前記監視空間を撮像して監視画像を取得する撮像部と、前記撮像部が取得する監視画像を記憶する記憶部と、前記人物検知部による前記人物検知時から第一の所定時間前以降に取得された監視画像を処理画像として決定する処理画像決定部と、前記処理画像について顔が十分に撮影されていない不審者を検出する不審者検出部と、を備える。
(もっと読む)
画像処理装置、及び物体検出装置
【課題】画像監視において太陽光の照射領域に出現する影を物体像の変化領域と区別する。
【解決手段】対象空間の背景が撮影された背景画像30を記憶する。光領域検出部41は、予め定められた輝度閾値に基づいて、背景画像30における光領域31を検出する。参照影領域設定部420は、光領域31の外側に参照影領域320を設定する。参照影特徴抽出部421は、参照影領域320における背景画像30の画像特徴に基づいて参照影特徴321を抽出する。影領域検出部44は、入力画像において光領域31の内側から参照影特徴321を有する部分を影領域として検出する。
(もっと読む)
画像監視装置
【課題】監視対象物である金庫や保管庫に近づく人物が検出された場合、内部犯行の可能性があるとして通報する画像監視装置を提供する。
【解決手段】画像監視装置10は、撮像部20にて取得された画像を処理し、追跡手段42による追跡結果と認証手段45による認証結果から、管理者権限を持つ人物が監視領域に存在しない状況下で金庫に近づく人物が検出されると、出力部50を制御し、警報信号を管理者に通知または外部に通報する制御手段46を備える。制御手段46は、管理者権限を持つ人物が存在する状況下では、警報信号を出力しないよう出力部50を制御する。
(もっと読む)
画像生成システム
【課題】フックの周辺を見下ろしながらクレーンを操作する操作者に対して有益な画像情報を提示できる画像生成システムを提供すること。
【解決手段】クレーンの操作を支援する画像生成システム100は、巻上装置67が巻き上げ或いは巻き下げるつり具69を鉛直斜め上方から撮像する撮像装置2と、撮像装置2が撮像した画像に視点変換処理を施し、つり具69を水平方向から見た出力画像を生成する出力画像生成手段11とを備える。
(もっと読む)
狭路走行支援装置
【課題】自車両前方の障害物が自車両側方付近に移動する際の自車両と障害物との連続的な相対位置関係を、運転者に容易かつ即座に把握させることができる狭路走行支援装置を提供する。
【解決手段】自車両前方の領域を表示する第一の表示画像10を作成する第一の表示画像作成部と、自車両の左右側面17,16の領域を表示する第二の表示画像15を作成する第二の表示画像作成部と、第一の表示画像10の下方または車両進行方向後方に第二の表示画像15を並べて配置すると共に、第二の表示画像15に表示される自車両の左右側面17,16の車幅方向端部から自車両の進行方向前方に延びる左右自車幅相当延長線14,13を第一の表示画像10と第二の表示画像15とに連続して表示する画像合成部と、を備えた。
(もっと読む)
映像監視レコーダ装置
【課題】重要性の高い映像を抽出して移行し、入出力性能とデータ信頼性を両立して向上させる。
【解決手段】映像監視レコーダ装置10は、複数の監視カメラ20a,20b,20cにより各撮影対象を撮影した映像を入力し、映像に付加された時刻に基づき映像を時系列に並べて一次記録部13に記録する記録制御部12と、撮影対象における状態変化とその状態変化を検知した時刻を含む記録イベントを生成する記録イベント生成部31と、記録イベント生成部31からの記録イベントをイベント情報として記録するデータベース14と、データベース14に記録されたイベント情報に基づいて一次記録部13から映像を抽出する映像移行部15と、映像移行部15により抽出された映像を記録する保存記録部16とを備えた。
(もっと読む)
画像抽出装置
【課題】常時記録された車両の運転動画像データから後退駐車シーン及び後退出庫シーンを自動抽出する。
【解決手段】車両を運転中の画像が時系列で順次記録された動画像データと、動画像データの時系列に対応付けて記録された車両を運転中の運転データとを記憶部12に記憶させておき、駐車シーンを抽出すると共に駐車シーンに対応する出庫シーンを抽出し、駐車シーンが前進駐車されたものか後退駐車されたものかを判定する駐車種別判定手段154と、駐車種別判定手段154において前進駐車と判定されると、対応する出庫シーンを後退出庫シーンとして抽出するシーン抽出手段156とを備える画像抽出装置10とする。
(もっと読む)
画像監視装置および監視システム
【課題】 物理的なパーティションを用いる必要がなく、監視者による常時監視の負担を軽減することができ、利用者ごとのアクセス権限に応じた監視を容易に実現する。
【解決手段】 画像監視装置5は、監視カメラ6で制限区域を撮影した制限区域画像を用いて制限区域内の利用者を監視する。記憶部24には、制限区域画像中に設定される個別監視領域と利用者の識別情報とを対応させたユーザ領域情報が予め記憶されている。監視領域設定部28は、制限区域に入場している利用者の識別情報に対応する個別監視領域を、制限区域画像中における監視領域として設定する。そして、設定された監視領域を示す案内表示が、制限区域の床面に投影表示装置によって表示される。異常判定部29は、制限区域画像中に設定された監視領域に生じる変動に基づいて、制限区域内における異常の有無を判定する。
(もっと読む)
監視装置および方法、並びにプログラム
【課題】顔画像による認識率を向上できるようにする。
【解決手段】顔画像抽出部202は、カメラ38により撮像された画像より、照合対象者の顔画像を抽出する。器官抽出部203は、照合対象者の顔画像より、顔を構成する各器官の部位を抽出する。器官スコア付与部204は、抽出された器官の信頼度を算出する。適正判定部206は、信頼度に基づいて、照合対象者の顔画像として適正であるか否かを判定する。生体情報認識装置21は、適正であると判定された照合対象者の顔画像と、蓄積された蓄積者の顔画像との類似度を計算し、類似度と所定の閾値との比較により、照合対象者の顔画像が蓄積者の顔画像であるか否かを判定する。本発明は、監視システムに適用することができる。
(もっと読む)
追尾枠の初期位置設定装置およびその動作制御方法
【目的】ターゲット画像の自動追尾を比較的容易にする。
【構成】被写体を撮像して得られる画像を表示画面に表示し,追尾枠を表示画面の中央部分の基準位置に表示する(ステップ31)。追尾枠の周りに追尾枠初期位置設定対象領域を設定し(ステップ32),その領域内の画像の高周波数成分を表す高周波数成分画像を生成する(ステップ33)。高周波数成分画像内において移動枠を移動させながら,高周波数成分量を算出する(ステップ34)。算出された高周波数成分量が最大となる移動枠の位置を追尾枠の初期位置と決定する(ステップ35)。
(もっと読む)
画像照合システム、撮像装置、送信装置、及びプログラム
【課題】 本発明は、カメラで撮像した画像とカメラ内の限られた量のメモリに記憶された画像とを照合して、高い確率で一致した結果が得られるようにすることを目的とする。また、照合のたびに照合情報を要求することを必要とせず、操作者の負担を軽減することを目的とする。
【解決手段】 ネットワークを介してカメラに接続された蓄積装置に蓄積された照合用の画像に、該画像をカメラへ送信する順序を規定するための規定情報を付与する。そして、蓄積装置に蓄積された照合用の画像を、規定情報に基づいて規定される順序でカメラ内のメモリに送信して、カメラ内に蓄積されている照合用の画像を更新する。
(もっと読む)
1 - 20 / 98
[ Back to top ]