
Fターム[5C054HA28]の内容
閉回路テレビジョンシステム (47,623) | 用途 (7,416) | 運輸 (2,418) | ナビゲーションシステム (62)
Fターム[5C054HA28]に分類される特許
41 - 60 / 62
画像サーバ
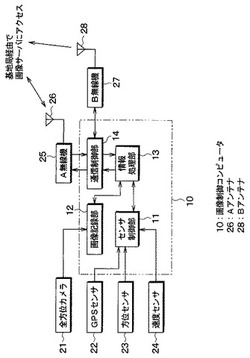
【課題】車外のユーザの要求に従って、車両の周囲の画像を、ユーザに画像を配信する画像サーバにアップロードする。
【解決手段】ネットワーク上に配置された画像サーバが、ユーザから指定の撮影場所における画像の配信の要求を受け、もしユーザの指定の撮影場所における画像を保存していなければ、車両に搭載された画像制御コンピュータ10に対して、この撮影場所に基づく撮影のタイミングで画像を撮影するよう無線通信によって要求する。そして、この要求を受信した画像アップロード装置10において、情報処理部13は、指定されたタイミングでこの撮影を行い、撮影された画像とこの画像の撮影情報とを、画像サーバにA無線機25を介して送信する。そして画像サーバが、この画像制御コンピュータ10から、この画像と画像の撮影情報とを受信し、受信した画像と画像の撮影情報とをユーザに配信する。
(もっと読む)
情報配信システム

【課題】 情報量が多いリアルタイムのカメラ画像をユーザに提供することのできる情報配信システムを提供する。
【解決手段】 情報配信システム1は、道路Rに配置されたカメラ装置2と、車両2に搭載されておりカメラ装置2のカメラ画像情報を通信で入手可能な端末装置4とを有する。カメラ装置2は、カメラ画像情報を送信する送信装置6を備え、端末装置4は、地図情報記憶手段と、カメラ位置情報記憶手段と、カメラ装置を示すカメラマークを地図上に表示する表示手段と、カメラ画像情報を受信するカメラ画像情報受信手段とを備える。端末装置4の表示手段には、カメラマークが選択されたときに、カメラ装置から得られるカメラ画像情報が表示される。
(もっと読む)
車載動画像圧縮装置及びドライブレコーダ
【課題】高速走行時の画質を確保しつつ、車両周辺を撮影した動画像を圧縮符号化する「車載動画像圧縮装置及びドライブレコーダ」を提供する。
【解決手段】制御部7は、車速センサ5より自動車の車速を取得し、車速が大きいほど低くなる圧縮レベルをMPEGエンコーダ2に設定する。MPEGエンコーダ2は、制御部7から設定された圧縮レベルに応じて圧縮符号化動作における圧縮率を変更する。圧縮率の変更は、圧縮レベル「低」、圧縮レベル「中」、圧縮レベル「高」の順に、GOP内のPピクチャの出現周波数(出現頻度)が低くなるように設定することにより行う。そして、記録制御部4は、MPEGエンコーダ2によって圧縮符号化された動画像データを記録媒体3へ記録する。
(もっと読む)
画像処理装置、画像表示装置、画像処理方法、プログラムおよび記録媒体
【課題】複数の撮影画像の地理的な関係を容易に把握可能とする。
【解決手段】データベース112から制御部113に、表示すべき地図画像の画像データD4およびその地図画像上で特定される撮影地点で撮影されたパノラマ画像の画像データD3、さらには撮影地点の情報を読み込む。制御部113は、画像データD3,D4等を用い、地図画像の各撮影地点にそこで撮影されて得られたパノラマ画像を配置し、さらに視点から見た画像に変換する。これにより、鳥瞰画像表示部117に、地図画像にパノラマ画像を配置した画像を視点から見た状態で表示する。タッチパネル118でユーザは視点変換のための操作(ズームイン操作、ズームアウト操作、鳥瞰視点移動操作など)を行うことができる。表示部117に表示される画像は、視点の移動に伴って変化する。撮影画像は広角画像であり、地図画像上には、視点に応じて切り出した一部領域を表示する。
(もっと読む)
車両用画像表示装置
【課題】 車両周囲に存在する障害物等の物体をより正確に見易く表示することができる「車両用画像表示装置」を提供する。
【解決手段】 車両用画像表示装置100は、車両の周囲を撮像する撮像カメラ102、104、106、108を含み、撮像カメラよって撮像された画像信号を車両上方の視点から見下ろしたときの画像信号に変換し、変換された画像信号を合成して視点変換表示を行う。視点変換表示において、合成される画像の境界120に障害物W2の表示が重なるときは、障害物W2の表示が境界120に重ならないように境界を変更して画像を合成する。
(もっと読む)
二次元図面と映像の合成表示装置
【課題】 映像と地図が示す場所及び視点方向を三次元的に合致させて表示することにより、三次元の映像と二次元の地図とを直感的に理解可能に同一画面に表示し、かつ、地図と映像それぞれを十分な大きさと解像度をもって表示させる。また、映像の抜けの部分に、他フレームから切り取った映像をはめ込むことで、完全な全周映像を実現する。
【解決手段】 三次元映像と二次元地図とを同一画面に合成表示する合成表示装置であって、表示される映像からオルソ面に平行な道路近傍の平面を求めるとともに、当該平面に映像と合成表示する地図面を合致させ、かつ、当該映像及び地図の方位を一致させて連続表示し、入力操作に応じて合成表示された地図と映像の方位を一致させたまま視点方向を変更する構成としてある。
(もっと読む)
車載機器制御装置
【課題】 安全性を確保しつつ運転者以外の乗員の利便性を向上させる。
【解決手段】 自車両が走行中(102が肯定)の場合、運転者の顔が車両の前方を向いているか否かの判定結果を表す運転者正面視フラグを取り込むと共に、助手席に着座している乗員の有無を検出した結果を取り込み(104,106)、運転者の顔が車両の前方を向いていない場合(108の判定が肯定)及び運転者の顔は車両の前方を向いているものの助手席に乗員がいない場合(110が肯定)は、ナビゲーション装置に対する乗員の操作を受け付けない操作受付禁止状態へ遷移させ(112)、運転者の顔が車両の前方を向いており助手席に乗員がいる場合(110が否定)は、ナビゲーション装置に対する乗員の操作を受け付ける操作受付状態へ遷移させる(114)ことで、助手席の乗員によるナビゲーション装置の操作を可能とする。
(もっと読む)
車両周辺監視装置
【課題】車両の後方を撮影するための撮影装置が撮影した画像に基づいて、車両の側方における他の車両の存在を推測することによって、少数の撮影装置によって車両周辺の情報を的確に把握することができ、運転者が不安を感じることなく、容易に、かつ、安全に車両の運転を行うことができるようにする。
【解決手段】車両の後方を撮影する後方撮影装置と、前記車両の側方についての案内を行う案内装置とを有し、前記後方撮影装置の撮影した画像に基づいて前記車両の側方における他の車両の存在を推測し、前記案内装置に案内を行わせる。
(もっと読む)
監視システム
【課題】多種の情報を同時に画面表示しても、監視画面を見易くする。
【解決手段】主要道路などのベース画面11に、交通関連情報画面としての補助監視情報画面12や道路情報画面13、支援情報画面としての環境情報画面14や地形情報画面15が合成されて表示されるのであるが、これら交通関連情報画面12,13はベース画面11上に重ねられて合成され、支援情報画面14,15はベース画面11での交通関連情報画面12,13とは反対側に重ねられて合成される。これにより、支援情報画面14,15は、ベース画面11や交通関連情報画面12,13の表示に影響しない。
(もっと読む)
車両周辺視認装置
【課題】車両に設置されている複数のカメラ映像を運転状況に応じ自動的に選択して視認性良く表示する車両周辺視認装置を提供する。
【解決手段】車両11に起こり得る様々な運転状況を認識するために車速センサ31A、測距センサ31Ba〜31Bd、操舵角センサ31C、シフトセンサ31D、方向指示器31E、カーナビゲーション装置31Fを車両に設置して運転状況判断部21に接続する。切換制御部22は、運転状況判断部21によって判断された運転状況に基づいて各撮像部12a〜12dのうちの複数の撮像映像を選択する。映像処理部23は切換制御部22によって選択された撮像映像に対して運転状況に応じた所定の画像処理を施した後に表示部13に表示させる。
(もっと読む)
カメラが撮影した前方画像に基づいて、先行車両と自車両との間の接近の危険に対処するための信号を出力する出力装置、および、当該出力装置のためのプログラム
【課題】自車両の前方を撮影するカメラの撮影画像に基づいて、先行車両と自車両との間の接近の危険に対処するための信号を出力する装置を提供する。
【解決手段】出力装置が、前方撮影画像を逐次取得し、その画像中からテールランプ31、32、およびナンバープレート33を検出し、それら部位の面積、距離34、35およびそれらスケールの変化率を検出する。そして、そのスケール、スケールの変化率、あらかじめ記憶されたナンバープレートの実寸比情報およびテールランプの平均的実寸比情報に基づいて、先行車両との車間距離および相対速度を算出し、その算出結果に基づき、衝突の危険性があると判定したときには、ユーザへの警告報知およびブレーキ制御のための信号を出力する。
(もっと読む)
車両停止検出装置、カーナビゲーション装置
【課題】 車両停止検出装置において、従来よりも高精度に車両の停止を検出する。
【解決手段】 領域抽出部2が、バックカメラ20で撮像された時系列の複数の画像S0のうち、所定の近傍画像Sをそれぞれ抽出し、特徴量算出部3が、この時系列の複数のうち最新の近傍画像Sについてコントラストを表す特徴量J1を算出し、また、複数の近傍画像S間での差異を示す特徴量J2を算出し、判定部4が、両特徴量J1,J2に基づいて、車両200の停止を判定することにより、車両の停止を精度よく検出する。
(もっと読む)
ナビゲーション装置
【課題】後部座席の状況を知らせることができるナビゲーション装置。
【解決手段】車両のナビゲーション装置は、後部座席方向を撮影する撮影装置と、後部座席の着席者の異常を検知する異常検知手段と、異常検知手段により異常を検知した場合、撮像装置で撮影した映像を表示する手段とを備えている。
(もっと読む)
広域モニタシステム
【構成】 広域モニタシステム10では、多数の複合センサ12を用いる。複合センサ12はカメラ22、赤外線センサ26、タグセンサ28および音センサ30を含み、ユーザ32の主として顔画像を撮影するとともに、ユーザ32の所持するIDタグ34のID番号を検出する。複合センサ12は各ゾーンに、重要ゾーンでは密に、それ以外のゾーンでは疎に配置される。各複合センサ12からの映像データやIDデータがサーバに収集される。サーバは、各ユーザをID番号で特定し、かつユーザの位置を特定することによって、各ユーザを広域表示画面上に表示する。このとき、予め設定しているプライバシ階層に応じて、ユーザの表現形式(ドットまたは実写像)を制御する。
【効果】 広域表示画面中に各ユーザが表示されるので、広域全体の状況を容易に把握できる。
(もっと読む)
車載用ドライブレコーダおよびこれを備えた車載用ナビゲーションシステム
【課題】 見通しが良好な画像を確実に保存することができ、ひいては、保存された見通しが良好な画像を用いて適切なデモ走行やルート案内を実現することができる「車載用ドライブレコーダおよびこれを備えた車載用ナビゲーションシステム」を提供すること。
【解決手段】 既に保存されている画像が撮影された走行地点と同一の走行地点において自車両に搭載されたカメラ5によって撮影された画像が取得された場合に、この取得された画像が撮影された際における周辺車両の情報と、前記既に保存されている画像が撮影された際における周辺車両の情報とを比較し、見通しが良好な方の画像を優先して保存するための制御を行う制御手段3を備えたこと。
(もっと読む)
車両用運転支援装置及び車両用運転支援方法
【課題】 自車両周辺の他車両の運転者が前記自車両を視認しているか否かの情報を得ることが可能な車両用運転支援装置及び車両用運転支援方法を提供する。
【解決手段】 車両用運転支援装置は、車両の位置情報を少なくとも含む車両情報を検出する車両情報検出手段(GPS電波受信部)1と、運転者の視線を検出する視線検出手段2と、前記車両情報及び運転者の視線に関する視線情報を自車両と前記自車両周辺の前記他車両との間で車車間通信手段3を介して通信処理させる制御手段5と、を備えてなるものである。
(もっと読む)
クルージング支援車載情報システム
【課題】車外、車内、走行の情報を逐次または選択的に取得し、それを加工して、運転者等に提示できるクルージング支援車載情報システムを提供する。
【解決手段】複数の超広角カメラ1a〜1dで車外の像を獲得する。記録再生装置は、各超広角カメラの出力を超広角映像のまま記録再生可能である。ゆがみ補正装置は、超広角映像の一部を切り出し実時間でゆがみを補正する。状況検出手段は、車速または走行モードまたは運転者の挙動を検出する。表示帯は、運転者の周囲に配した単一のもしくは同じ高さに表示領域を有する2つ以上の表示装置で構成されている。提示制御手段は、前記状況検出手段の判断出力に基づいて前記各補正装置の出力を選択的にまたは合成して前記表示装置への提示を制御する。
(もっと読む)
表示制御装置
【課題】 様々な撮影方向から得られた映像に対して、撮影方向を利用者に認識させることができる表示制御装置を提供する。
【解決手段】 車両に設けられ車両の外部を撮影する撮影装置によって撮影された映像を表示装置に表示させる制御手段を備えた表示制御装置において、制御手段は、車両を表す自車画像31を表示装置に表示させると共に、自車画像31の表示位置に対して、車両に対する撮影装置の撮影方向に応じて定まる方向に映像32を表示させる。
(もっと読む)
ナビゲーション装置およびナビゲーション方法
【課題】 映像をドライバが積極的に利用することが可能な「ナビゲーション装置およびナビゲーション方法」を提供する。
【解決手段】 表示部7に表示した画像に映し出された建造物がドライバから選択されると、POI情報取得部110は画像データに対応づけられた付加情報に含まれる撮影時の自車位置及び自車向き並びに自車向きに対するカメラ25の撮影方向と地図データとに基づいて、選択された建造物を特定する。POI情報取得部110は地図データ又は所定のネットワーク上に設置されたサーバから、当該建造物に関するPOI情報を取得する。取得したPOI情報は表示部7に表示される。また、表示部7に表示した画像をドライバが選択することで、この画像が撮影された場所を目的地に自動的に設定するように構成することも可能である。
(もっと読む)
広角画像の補正方法及び車両の周辺監視システム
【課題】 車両の外部を撮影した水平方向に広い視野角を有した広角画像を違和感なく車室内に表示するための画像の補正方法を提供する。
【解決手段】車両の外部を撮影した水平方向に広い視野角を有した広角画像Wを車室内の表示装置3に表示するための広角画像Wの補正方法であって、垂直方向の上部に向かうに従って広角画像Wが縮小され、下部に向かうに従って広角画像Wが拡大されるように相対的な拡縮を施す遠近感補正21と、広角画像Wの水平方向の中央部を通る垂直基準線から水平方向の両端部に向かうに従って広角画像Wを拡大する側方距離感補正22とを行って、広角画像Wを補正する。
(もっと読む)
41 - 60 / 62
[ Back to top ]