
Fターム[5C122EA67]の内容
Fターム[5C122EA67]に分類される特許
1 - 20 / 963
画像処理装置および画像処理方法、プログラム
撮像装置、商品販売処理装置、およびプログラム
撮像装置
ネットワークカメラ
電子カメラおよび電子カメラの制御方法
立体撮影装置およびそれを用いた携帯端末装置
【課題】正面撮影を行うメインカメラと,自分撮影用のサブカメラを利用して静止画像や動画像の立体画像撮影が可能な立体撮影装置およびそれを用いた携帯端末装置を提供する。
【解決手段】画像データ処理部135は、メインカメラ110の画像から構造物を確定し、背景画像からの切り出しを行う。サブカメラ111の画像から構造物位置情報を抽出し、それに基づいて構造物をメインカメラで得られた画像位置から移動する。背景と隠れたオブジェクトを補正する。また、サブカメラ111の画像の画像情報からメインカメラ110で撮影した画像では隠れた部分の画像情報を生成するので、間違いのない補正が可能である。
(もっと読む)
立体撮影装置およびそれを用いた携帯端末装置

【課題】正面撮影を行うメインカメラと,自分撮影用のサブカメラを利用して静止画像や動画像の立体画像撮影が可能な立体撮影装置およびそれを用いた携帯端末装置を提供する。
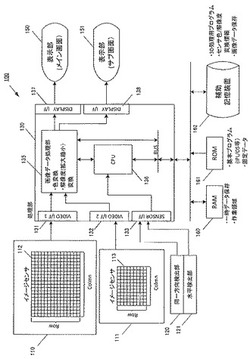
【解決手段】上筐体11には、メイン画面13、サブ画面14が表裏に配置されている。上筐体11は、回転ヒンジ15により、携帯端末10の開閉時に下筐体12に対して180度回転することが出来る。さらに、上筐体11は、回転ヒンジ16により、3D撮影時には携帯端末10を開いた状態で、下筐体12の表面に対して180度回転して裏返しにすることができる。メインカメラ17とサブカメラ18が同一方向に向けて配置されることになる。このときメインカメラ17とサブカメラ18の距離は、視差距離に該当する程度である。3D撮影時には、利用者は、サブ画面14をファインダーとして撮影する。
(もっと読む)
撮像装置、撮像装置の制御方法、プログラム
【課題】単体では2次元画像の撮影を行う撮像装置を複数台利用し、3次元画像の撮影を簡単に行えるようにする。
【解決手段】撮像装置は3次元画像を撮像するための撮像パラメータの情報を他の撮像装置と共有する手段を有し、前記他の撮像装置と無線接続している際に、ユーザから撮像指示があった場合には、前記他の撮像装置と共有した前記撮像パラメータを用いて、前記他の撮像装置と共に3次元画像を生成するための撮像を行い、前記他の撮像装置と無線接続していない際に、ユーザから撮像指示があった場合には、2次元画像を生成するための撮像を行う。
(もっと読む)
画像処理方法および装置、プログラム
【課題】複数の撮像部によって構成される多眼方式の撮像装置において、一部の撮像部に動作不良が生じても、簡易かつ精度よく当該動作不良の生じた撮像部の撮影領域をカバーする。
【解決手段】複数の撮像部によって構成される、回転機構によって回転可能な撮像部群と、前記撮像部の不良を検知する不良撮像部検知手段と、を備える多眼方式の撮像装置であって、前記不良撮像部検知手段で不良が検知された撮像部の位置に不良が検知されなかった撮像部がくるように前記撮像部群を回転させ、不良が検知された撮像部によって取得されるべき画像を不良が検知されなかった撮像部を用いて撮影する。
(もっと読む)
画像処理装置および画像処理方法、並びにプログラム
【課題】多視点からの画像データを用いて、リフォーカス処理と高解像度化処理とを同時に行う場合、どの視点から見ても被写体上の同一の点は同じ輝度(色)に見えている必要がある。また、被写体が仮想的なピントを合わせる面上に存在する必要がある。そのため、上記条件から逸脱している場合、画質劣化が生じる。
【解決手段】仮想撮像系が合焦する面の情報と複数の視点の配置の情報とから、前記複数の画像データの画素が前記仮想撮像系の画像上のどの位置に配置されるかを表す画素配置パラメータを算出し、画素配置パラメータから前記複数の画像データ間の前記仮想撮像系の画像上での画素値の整合度を算出する。そして、整合度から前記仮想撮像系の画像上での画素位置の近傍にある画素の画素補間パラメータを算出し、前記配置パラメータと前記画素補間パラメータとを用いて、前記複数の画像から画像合成を行う。
(もっと読む)
棒状ワーク撮像装置および棒状ワークの先端同心判定装置
【課題】測定時間を短縮できると共に、高い精度で棒状ワークを管理できる棒状ワーク撮像装置および棒状ワークの先端同心判定装置を提供する。
【解決手段】鏡筒13にビームスプリッター42、43を設け、対物レンズ41からの像光を3つの光路P1〜P3に分光し、各光路P1〜P3の像光を拡大して、カメラ14、15、16で撮像する。ビームスプリッター42、43の光軸の中心位置をずらすことで、鏡筒13に連なるカメラ14で先端加工部21を撮像し、カメラ15で本体ストレート部23の一方の輪郭を撮像し、カメラ16で本体ストレート部23の他方の輪郭を撮像する。これらカメラ14、15、16の撮像信号を解析し、先端加工部21の軸心の位置と本体ストレート部23の軸心の位置とが合致するかどうかにより、棒状ワーク10の良否を判定する。
(もっと読む)
PCBの素子を配列するカメラシステム
【課題】外付けの光学システムを使用することによる欠点がない、鮮明度が高い画像を生成するカメラシステムを提供する。
【解決手段】第1面と、第1面と反対の第2面とを有する筐体102と、筐体の第1面に位置し筐体から離れる第1方向に向けられ、素子112の画像を捕捉し第1画像信号を生成する第1画像センサ104であって、プリズムを有さない第1レンズアセンブリを含む第1画像センサと、筐体の第2面に位置し、第1方向と反対の第2方向に向いて第1画像センサと配列され、PCB上のフットプリントの画像を捕捉し、第2画像信号を生成する第2画像センサであって、プリズムを有さない第2レンズアセンブリを含む第2画像センサ106と、第1画像信号と第2画像信号とをミックスし、ミックス画像信号を生成するミックス回路と、ミックス画像を処理し、表示モニタに素子とフットプリントとの重ね合わせ画像を表示するプロセッサとを有する。
(もっと読む)
複眼カメラの制御方法及び制御装置
【課題】 複数の固体撮像素子間の画質の差異を小さくすることを可能にした固体撮像素子の駆動制御方法を提供すること。
【解決手段】 第1の撮像素子と第2の撮像素子と、前記第1、第2の撮像素子の駆動回路と、前記第1、第2の撮像素子からの映像信号のノイズ量を比較するための画像処理回路と、を具え、前記第1の撮像素子を駆動している期間において、前記ノイズ量の比較結果に応じて、第2の撮像素子を駆動することを特徴とする構成とした。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】鑑賞者が所望する視点で撮影されたのと等価な画像を容易に得ることができる。
【解決手段】撮像画像取得部62は、オブジェクトOBが移動し得る所定の空間をそれぞれ異なる位置から撮像する複数のカメラ11の各々によって撮像された複数の撮像画像のデータを取得する。位置情報取得部63は、所定の空間を移動するオブジェクトOBの位置を取得する。視点変換画像加工部74は、取得された位置に基づいて、撮像画像取得部62により取得された撮像画像のデータを視点変換の加工をすることで、オブジェクトOBに配置された仮想視点が所定の眺望方向を眺めた様子を表わす画像のデータを、視点変換画像のデータとして生成する。表示制御部65は、生成された視点変換画像のデータを表示出力する制御を実行する。
(もっと読む)
LEDドライバ、撮像装置、電子機器及びLEDの発光方法
【課題】暗い環境下での3D画像撮影において、3D画像効果を高めることができるLEDドライバを提供する。
【解決手段】左側カメラを含む左側撮像部と右側カメラを含む右側撮像部の各々に対して撮像補助光源となる左側LED及び右側LEDを発光させるLEDドライバであって、前記左側撮像部及び前記右側撮像部から出力される撮影開始タイミング信号をそれぞれ入力される入力端と、前記左側LED及び前記右側LEDにそれぞれ電流を出力する出力端と、を備え、前記左側撮像部及び前記右側撮像部それぞれからの前記撮影開始タイミング信号に同期して、前記左側LED及び前記右側LEDそれぞれに異なる大きさの電流を供給するLEDドライバとする。
(もっと読む)
ステレオ撮像装置、同期撮像方法および電子情報機器
【課題】CMOSのように外部から共通トリガを与えることができない撮像装置であっても、複数の撮像素子に対して同期の取れた画像信号を出力する。
【解決手段】フレーム制御部4は、左右の撮像装置2A,2Bの一方の撮像装置2Aを起動し、その一方からのフレーム信号Aを基準にして、左右の撮像装置2A,2Bのうちの他方のフレーム信号Bの出力タイミングを制御して撮像装置2Bを起動する。また、フレーム制御部4は、左右の撮像装置2A,2Bの各フレーム信号の出力タイミングの差分時間だけ、左右の撮像装置2A,2Bのうちの他方の撮像装置2Bの1フレーム期間を延長するかまたは短縮することにより同期ズレを解消する。
(もっと読む)
撮像装置
【課題】撮影者が被写体を撮影する際、被写体側から撮影者のことが撮像装置によって見えなくなってしまうことを防止する。
【解決手段】撮像部17で撮像される画像に基づいて、実空間に対応する3次元座標における第1被写体のひとみ位置を検出するひとみ位置検出部18と、実空間に対応する3次元座標における第2被写体の形状情報を検出する形状検出部20と、撮像部19で撮像される画像の情報と、第1被写体のひとみ位置と、第2被写体の形状状態と、記憶部22に記憶される表示部14の画像表示面P1の大きさとに基づいて、第1被写体のひとみ位置から第2被写体を見たときに表示部14の画像表示面P1に投影される第2被写体を含んで表示部14に表示される画像を生成する表示画像生成部13とを備えて撮像装置10を構成する。
(もっと読む)
カメラモジュール及びその画像補正方法
【課題】2次元映像または3次元立体映像を獲得するために、2つのカメラで撮影された映像が一致するように補正できるカメラモジュールを提供する。
【解決手段】OIS(Optical Image Stabilization)部を備えているメインカメラ及びサブカメラのそれぞれで映像を撮影する段階と、メインカメラで撮影された映像から特定物体の第1映像を抽出し、サブカメラで撮影された映像から特定物体の第2映像を抽出する段階と、メインカメラのOIS部を駆動させて、第1映像が第2映像に一致するように補正する段階と、を含む。
(もっと読む)
電子機器
【解決手段】スマートフォンCPU60は、接続可能なディジタルカメラを周期的に探索し、探知された1または2以上のディジタルカメラのうちグループ選択操作によって選択されたグループに属するディジタルカメラとの間で無線接続を確立する。スマートフォンCPU60はまた、その後に追加的に探知された1または2以上のディジタルカメラのうち選択グループに属するディジタルカメラとの間で無線接続を確立し、無線接続が確立された1または2以上のディジタルカメラ受信感度が基準以下のディジタルカメラとの間で無線接続を解除する。スマートフォンCPUはさらに、無線接続が確立されている1または2以上のディジタルカメラから出力された画像データをLCDモニタ72に表示する。この結果、画像データの表示態様は、無線接続の確立/解除に応じて動的に変化する。
【効果】表示性能が向上する。
(もっと読む)
電子機器
【解決手段】スマートフォンCPU60は、接続可能な1または2以上のディジタルカメラを探索し、探知された1または2以上のディジタルカメラのうち中から指定されたディジタルカメラと接続する。スマートフォン60はまた、接続されたディジタルカメラから出力されたライブ画像をLCDモニタ72に継続的に表示し、探知された1または2以上のディジタルカメラが属するグループが示されたグループメニューをライブ画像と並列してLCDモニタ72に表示する。表示されたグループメニューを参照したグループIDタッチ操作が行われると、スマートフォンCPU60は、このタッチ操作によって指定されたディジタルカメラと接続するべく、グループIDが記述されたグループ選択通知を発行する。
【効果】表示すべき電子画像の更新に関する操作性が向上する。
(もっと読む)
1 - 20 / 963
[ Back to top ]