
Fターム[5C122FA02]の内容
Fターム[5C122FA02]の下位に属するFターム
パノラマ撮影 (562)
Fターム[5C122FA02]に分類される特許
1 - 20 / 610
デジタルカメラ
立体撮影装置およびそれを用いた携帯端末装置
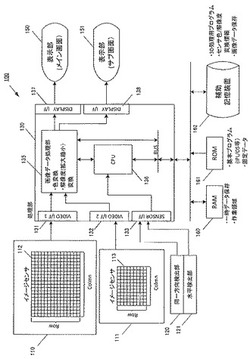
【課題】正面撮影を行うメインカメラと,自分撮影用のサブカメラを利用して静止画像や動画像の立体画像撮影が可能な立体撮影装置およびそれを用いた携帯端末装置を提供する。
【解決手段】画像データ処理部135は、メインカメラ110の画像から構造物を確定し、背景画像からの切り出しを行う。サブカメラ111の画像から構造物位置情報を抽出し、それに基づいて構造物をメインカメラで得られた画像位置から移動する。背景と隠れたオブジェクトを補正する。また、サブカメラ111の画像の画像情報からメインカメラ110で撮影した画像では隠れた部分の画像情報を生成するので、間違いのない補正が可能である。
(もっと読む)
車載カメラシステム及びその較正方法、及びその較正プログラム

【課題】撮像部の 内部パラメータと外部パラメータを容易に較正できる車載カメラシステムの較正方法を得ること。
【解決手段】車載カメラシステム1の較正方法は、撮像部307〜310により撮像された画像から予め設定された直線部分を有する認識対象物を認識し、画像から認識対象物の特徴点を抽出し、その特徴点を仮想球面に投影して仮想球面601に形成された特徴点列の形状に基づいて撮像部307〜310の内部パラメータを推定し、推定した内部パラメータを較正するとともに、特徴点に基づいて画像の俯瞰視点を算出し、その算出した俯瞰視点に基づいて撮像部307〜310の外部パラメータを推定し、その推定した外部パラメータを較正することを特徴としている。
(もっと読む)
立体撮影装置およびそれを用いた携帯端末装置
【課題】正面撮影を行うメインカメラと,自分撮影用のサブカメラを利用して静止画像や動画像の立体画像撮影が可能な立体撮影装置およびそれを用いた携帯端末装置を提供する。
【解決手段】上筐体11には、メイン画面13、サブ画面14が表裏に配置されている。上筐体11は、回転ヒンジ15により、携帯端末10の開閉時に下筐体12に対して180度回転することが出来る。さらに、上筐体11は、回転ヒンジ16により、3D撮影時には携帯端末10を開いた状態で、下筐体12の表面に対して180度回転して裏返しにすることができる。メインカメラ17とサブカメラ18が同一方向に向けて配置されることになる。このときメインカメラ17とサブカメラ18の距離は、視差距離に該当する程度である。3D撮影時には、利用者は、サブ画面14をファインダーとして撮影する。
(もっと読む)
撮像表示装置、撮像表示方法
【課題】ユーザの視覚能力の拡大や多様な画像提供の実現。
【解決手段】ユーザが例えば眼鏡型もしくは頭部装着型の装着ユニットなどにより撮像表示装置を装着した際に、撮像部がユーザの視界方向の光景を撮像する状態とする。そして撮像部で撮像された画像、即ち第1の画像信号生成手段(C1)で得られたユーザの視界方向の光景となる表示画像信号を表示手段に供給して表示させるが、そのときに、同時に第2の画像信号生成手段(C2)で生成された表示画像信号による異なる画像も表示させる。例えば画面分割や親子画面などの形態で同時に複数の画像を表示させる。
(もっと読む)
カメラキャリブレーション装置、乗員支援装置、カメラキャリブレーション用歪み係数生成方法
【課題】広角レンズの歪みを、容量の小さなメモリで高精度に補正するカメラキャリブレーション装置を提供すること。
【解決手段】カメラ50と歪み校正用被写体の相対位置情報から歪みのない理想結像位置を算出する理想結像位置算出手段12と、校正用被写体が撮影された画像からレンズの歪みを含んだ実測結像位置を検出する実測結像位置検出手段11と、結像位置に応じた重みを生成するための重み関数を決定する重み関数決定手段14と、歪み係数を用いて算出される歪み量が含まれる理想結像位置と実測結像位置、及び、結像位置に応じて前記重み関数が生成した重みを、歪み係数の評価関数に入力して、評価関数の演算結果から歪み係数を決定する歪み係数決定手段13と、を有することを特徴とするカメラキャリブレーション装置を提供する。
(もっと読む)
撮像システムおよび撮像装置
【課題】例えば、複数の撮像装置を使用することなく、車底の障害物等をドライバが認識できるようにする。
【解決手段】撮像システムは、例えば、車両の車底に取り付けられ、全方位を撮像する撮像部と、前記撮像部により撮像された前記全方位の映像を表示する表示部とを備える。また、例えば、車両の車底に取り付けられる全方位撮像部を備え、非撮像状態では、全方位撮像部が保護部材により覆われ、撮像状態では、全方位撮像部が保護部材より露出される撮像装置である。
(もっと読む)
カメラ姿勢算出装置
【課題】複数台の監視カメラの監視空間が什器等が設置された建物内、或いは建物内の廊下などの場合、各カメラの姿勢を校正する基準物体を設置するスペースを確保できない。
【解決手段】自己及び相互の鉛直下を撮像可能に設置された2台のカメラ2a,2bのそれぞれの鉛直下にマーカー7a,7bを配置する。視線方向算出部30は、例えば、カメラ2aについて当該カメラで撮像した画像における自己マーカー7a及び他方カメラ鉛直下の相手マーカー7bの位置座標を用いて当該カメラから各マーカーへの視線方向を算出する。姿勢算出部31は、自己マーカーへの視線方向から得られる鉛直方向と、相手マーカーへの視線方向から得られるカメラ2a,2b間の方位とを用いて世界座標系における各カメラの姿勢を算出する。
(もっと読む)
撮像装置、撮像装置の制御方法及びプログラム
【課題】撮影方向の設定を短時間に行うことができるようにする。
【解決手段】キャプチャされた画像データの輝度値を評価する処理を実行し、最も輝度値が高い画素位置、つまり画像中の最も明るい領域が画面の中央に位置するかどうかをチェックする。このチェックの結果、画面の中央ではない場合は、撮影された画像内で最も明るい領域(輝度値が高い画素位置)が画面の中央位置に来るようにカメラの撮影方向を変更する処理を実行し、画像中の最も明るい領域が画面の中央に位置するまで、撮像処理、輝度値の評価、及び撮影方向の変更を繰り返す。
(もっと読む)
画像処理方法
【課題】予め基準となる画像データを保持する必要がなく且つ簡易に、光軸と穴の中心軸との位置ずれを補正して、パノラマ展開画像に変換することが可能な画像処理方法を提供する。
【解決手段】環状画像から内円及び外円を抽出する工程と、抽出した内円及び外円の中心をそれぞれ求める工程と、極座標変換する際に基準となる展開中心を、内円中心と外円中心との間で順次移動させながらパノラマ展開画像に変換する工程とを備える。これにより、全方位撮像装置10により穴Hの側壁面を撮像した環状画像をパノラマ展開画像に極座標変換する際に、全方位撮像装置10の光軸L1と穴Hの中心軸L2との位置ずれに起因する歪みを補正することができる。
(もっと読む)
撮像装置及びその制御方法
【課題】広い視野及び広い撮像域をもつ撮像装置において、被写体中の検体の光軸方向の位置のばらつきに起因する画像のぼけを抑制し、高品質な画像を取得する。
【解決手段】撮像装置が、検体のZ位置のばらつきに応じて撮像領域の広さを適応的に制御する。具体的には、検体のZ位置のばらつきが小さい場合は撮像領域を広く、検体のZ位置のばらつきが大きい場合は撮像領域を狭くする。あるいは、検体のZ位置のばらつきが小さい場合は使用する撮像素子を多くし、検体のZ位置のばらつきが大きい場合は使用する撮像素子を少なくする。あるいは、検体のZ位置のばらつきが小さい場合は撮像域の広い撮像素子を使用し、検体のZ位置のばらつきが大きい場合は撮像域の狭い撮像素子を使用する。
(もっと読む)
撮像装置および顕微鏡システム
【課題】ユーザが所望する色を画像内において直感的に把握しやすくできる撮像装置および顕微鏡システムを提供する。
【解決手段】被写体を撮像して被写体の画像データを生成する撮像部4と、撮像部4が生成した画像データに対応する画像を表示する表示部62と、表示部62が表示する画像内に含まれる色成分から特定色を指定する指示信号の入力を受け付ける入力部72と、入力部72が入力を受け付けた指示信号に応じて、画像内に含まれる輝度成分を変更することなく、特定色または特定色以外の色成分の彩度を変化させる画像処理を行う特定色強調処理部511と、を備える。
(もっと読む)
撮像レンズおよび撮像装置
【課題】撮像レンズにおいて、小型化、低コスト化、広角化および高性能化が実現可能であり、さらには使用する撮像素子に制限をなくす。
【解決手段】撮像レンズ1は、物体側から順に、負の第1レンズL1、負の第2レンズL2、正の第3レンズL3、正の第4レンズL4、負の第5レンズL5および正の第6レンズL6との実質的に6枚のレンズからなる。第3レンズL3の物体側の面が凹面であり、R10を第5レンズL5の物体側の面の曲率半径、R11を第5レンズL5の像側の面の曲率半径、f5を第5レンズL5の焦点距離、fを全系の焦点距離としたとき、下記条件式(4)および(16)を満足する。
(R10+R11)/(R10−R11)<−0.543 … (4)
1.6<|f5/f|<4.6 … (16)
(もっと読む)
撮像レンズおよび撮像装置
【課題】撮像レンズにおいて、小型化、低コスト化、広角化および高性能化が実現可能であり、さらには使用する撮像素子に制限をなくす。
【解決手段】撮像レンズ1は、物体側から順に、負の第1レンズL1、負の第2レンズL2、正の第3レンズL3、正の第4レンズL4、負の第5レンズL5および正の第6レンズL6との実質的に6枚のレンズからなる。第2レンズL2の物体側の面が凸面、第3レンズL3の像側の面が凸面であり、f6を第6レンズL6の焦点距離、R13を第6レンズL6の像側の面の曲率半径、fを全系の焦点距離としたとき、下記条件式(14)および(15)を満足する。
2<f6/f … (14)
−2.51<R13/f<−1.70 … (15)
(もっと読む)
撮像装置、位置計測装置及び撮像方法、位置計測方法、並びに構造物の製造方法
【課題】CCDやCMOSセンサなどの撮像素子を用いた薄型の撮像装置が多く用いられており、位置計測対象を複数の撮像装置で撮像して所定の画像処理を施すことにより、位置計測対象の位置を計測している。この時、視野を広くしても、分解能の低下を抑制できる撮像装置、位置計測装置及び撮像方法並びに位置計測方法を提供する。
【解決手段】視野V1〜V3の像を撮像する撮像素子2を備える。複数の視野の像を重ねて撮像素子に撮像可能とする像重ね部3を備える。前記像重ね部は、入射した光の少なくとも一部を前記撮像素子に入射させるビームスプリッターを有する。
(もっと読む)
撮像光学系および全天球型撮像装置および撮像システム
【課題】全天球型撮像装置に用いられる撮像光学系の、撮像センサを設けた基板により入射光束が遮られる問題を有効に解決し、小型の全天球型撮像装置を実現する。
【解決手段】180度より広い画角を持つ広角レンズと、この広角レンズによる像を撮像する撮像センサとによる同一構造の撮像光学系を2つ組み合わせ、各撮像光学系により撮像された像を合成して4πラジアンの立体角内の像を得る全天球型撮像装置における撮像光学系であって、広角レンズは、物体側から像側へ向かって、前群、反射面、後群を配してなり、前記反射面により前群の光軸を前記後群に向かって90度折り曲げるものであり、基板が、広角レンズの最大画角光線を遮らないように、基板のサイズおよび形状が定められている。
(もっと読む)
撮像監視画面及び全方位撮像画面監視システム
【課題】全方位撮像画面の撮像エリアの外周での映像の分解能が粗い場合でも、鮮明な画像を得られる撮像監視画面及び全方位撮像画面監視システムを提供する。
【解決手段】全方位撮像画面監視システムSは、全方位を動画として撮像可能な固定された第1の撮像手段10と、動画として撮像可能な固定された第2の撮像手段20と、第1の撮像手段10と第2の撮像手段20で撮像した動画を録画する記録手段30と、記録手段30を制御する制御手段40と、第1の撮像手段10、第2の撮像手段20、記録手段30からの撮像を表示する表示手段50と、を備え、第2の撮像手段20は、第1の撮像手段10の撮像領域の外周を撮像する位置に配置されたものである。
(もっと読む)
画像表示装置
【課題】視認性の高い画像表示装置を提供する。
【解決手段】本発明の画像表示装置1は、周方向全周(周囲360°)に画像を表示可能な半球状のスクリーン20を有する表示部10と、スクリーン20の頂部に全周囲(周囲360°)を撮影可能な画像撮影部40と、制御装置50と、を備えている。画像表示装置1は、制御装置50によって制御され、スクリーン20による画像表示時において、画像撮影部40によって画像表示装置1の外部周辺を撮像し、その撮像情報から輝度分布検出部によって領域毎の輝度分布を検出し、輝度の高い領域周辺のスクリーン20の画像表示を明るくする。
(もっと読む)
多眼撮像装置
【課題】広角レンズを用いて撮影するのと同様に、水平方向と垂直方向にともに広範囲を撮影することができる薄型の多眼撮像装置を提供する。
【解決手段】多眼撮像装置10は、水平方向に2以上かつ垂直方向に2以上の2次元に配列され、各々にレンズ16及び撮像素子17を有し、隣接するユニットの撮影範囲の一部が重複する複数の撮像ユニット15a〜15iと、撮像ユニット15a〜15iの各々の光軸L15a〜L15iを水平方向または垂直方向傾斜させることにより、各々の撮像ユニットが撮影する方向を変化させる手段であり、通常時には、各光軸L15a〜L15iを正面方向に向け平行にし、広角撮影時に光軸L15a〜L15iを放射状に傾斜させる傾斜制御部13と、撮像ユニット15a〜15iで得られた画像を合成し、各々の撮像ユニット15a〜15iで得られる画像よりも撮影範囲が広い合成画像を生成する画像合成部12と、を備える。
(もっと読む)
画像取得装置、画像取得システム、および対物光学系
【課題】 高い解像力を有し、かつ、広い撮像領域の全域でフォーカスを合わせることができる対物光学系を提供すること。
【解決手段】 対物光学系400は、物体を結像する結像光学系40と、物体の像を再結像する再結像光学系70と、結像光学系40と再結像光学系70との間の光路上に配置されている反射手段60と、を有しており、反射手段60の光軸方向(Z方向)の位置および光軸に対する傾きの少なくとも一方を局所的に変更可能である。
(もっと読む)
1 - 20 / 610
[ Back to top ]