
Fターム[5C122GD06]の内容
スタジオ装置 (397,422) | カメラ/カメラ付属機器の支持 (2,858) | 雲台/ターンテーブル駆動制御 (601)
Fターム[5C122GD06]に分類される特許
1 - 20 / 601
撮像装置
自動追尾カメラシステム
【課題】 追尾被写体の位置が追尾の所定位置と異なっていても大きな映像変化をさせないで所定の位置に追尾制御することを可能にした自動追尾カメラシステムを提供する。
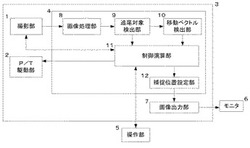
【解決手段】 自動追尾カメラシステムは、レンズ装置と撮像装置を含む撮影部をパン・チルト回動させる回動手段と、撮影映像から追尾対象を検出する追尾対象検出手段と、追尾対象の移動ベクトルを検出する移動ベクトル検出手段と、撮影映像内での追尾対象の捕捉位置を設定する捕捉位置設定手段と、回動手段の駆動を制御する制御手段を有し、制御手段は、追尾対象検出手段によって撮影映像内に追尾対象を検出した後、移動ベクトル検出手段によって検出された移動ベクトルに基づき、捕捉位置に追尾対象を捕捉するよう回動手段を制御する捕捉モードと、捕捉モードの後、追尾対象を捕捉位置に捕捉し続けるように回動手段を制御する維持モードと、を有する。
(もっと読む)
撮像装置

【課題】 長期間の連続使用環境下で、精度の高いパンニング機構を実現する。
【解決手段】 カメラユニット4の両側に設けたチルト軸9、10のそれぞれを、パンニング基台2上に立設された第1、第2支柱部5、6の軸受部に組込む。一方の第1支柱部5内にチルト駆動機構を組込み、他方の第2支柱部6内にエンコーダ機構による光学センサを構成することで、駆動機構と隔離された空間内に、大直径のパターン板を用いたエンコーダ機構を実現する。
(もっと読む)
撮像装置
【課題】 コストダウンと小型化とを図る上で有利であるとともに、撮像部の撮影方向を変更する速度に依存することなく且つ様々なタイミングで、本体内を冷却することができる撮像装置を提供することができる。
【解決手段】 レンズユニット104および撮像素子105により被写体を撮像する撮像装置であって、レンズユニット104の撮影方向を変更するチルト軸120と、チルト軸120を駆動させるための動力源と同一の動力源であるチルトモータ125により駆動され、カメラ本体101内の気体を循環させるチルトファン124と、チルトモータ125により、チルト軸120およびチルトファン124を選択的に駆動させるためのチルトソレノイドアクチュエータ201と、を有することを特徴とする。
(もっと読む)
雲台装置の駆動制御装置およびそれを有する撮影システム
【課題】 任意のタイミングと大きさで制動力を与える、制動力制御手段を設け、消費電力の増加を抑え、パンチルト動作時の動作ムラを低減させることを可能にした雲台装置の駆動部を提供する。
【解決手段】 雲台装置において駆動信号に基づきパンチルト駆動を行う駆動制御装置であって、被駆動部と係合し、該駆動信号に基づき該被駆動部を駆動する駆動部と、該被駆動部を制動する制動部と、を有し、該駆動信号に基づき、該被駆動部を制動するモードと該被駆動部を制動しないモードとを切り替えることを特徴とする構成とした。
(もっと読む)
撮像装置、撮像装置の制御方法及びプログラム
【課題】撮影方向の設定を短時間に行うことができるようにする。
【解決手段】キャプチャされた画像データの輝度値を評価する処理を実行し、最も輝度値が高い画素位置、つまり画像中の最も明るい領域が画面の中央に位置するかどうかをチェックする。このチェックの結果、画面の中央ではない場合は、撮影された画像内で最も明るい領域(輝度値が高い画素位置)が画面の中央位置に来るようにカメラの撮影方向を変更する処理を実行し、画像中の最も明るい領域が画面の中央に位置するまで、撮像処理、輝度値の評価、及び撮影方向の変更を繰り返す。
(もっと読む)
撮像装置およびその制御方法
【課題】 赤道儀などの機材を使用することなく、撮像装置を固定した状態で天体の追尾撮影を容易に行う。
【解決手段】 地球上での高度を含む座標を取得し(S301)、光軸が向いている方角、仰角、および光軸を中心とした回転方向の傾きを含めた姿勢を取得し(S302)、取得された座標と、取得された姿勢から、画角内の天体の移動方向および移動速度を演算し(S304)、演算により求められた天体の移動方向および移動速度に基づいて被写体の光学像を結像するためのレンズ群の一部を動かすことにより光軸の方向を変化させて天体の追尾を行う(S308)。
(もっと読む)
撮像装置
【課題】 従来の撮像装置は、長時間露光を必要とする天体撮影において、どの程度の露出時間で撮影すれば適正な露出で被写体を撮像できるのかがわからなかった。
【解決手段】 特別バルブ撮像モードの露光中に、撮像センサ2で検出される天体からの光の強度が図2(b)に示すように強度積算部7により、積算される。さらに、撮像手段により撮像される撮像画像6aおよび強度積算部7により積算される強度の情報(図形22、23)がLCD制御部5により、LCD6に表示される。このため、ユーザは、特別バルブ撮像モードの露光中に、LCD6に表示される強度の情報および撮像画像を見ることで、撮像している天体の撮像画像の露出の程度をすぐに知ることができる。また、最適な露出に直ちにデジタルカメラ1を調整することができる。
(もっと読む)
電子カメラ
【構成】イメージセンサ18は、シーンを表す光学像を捉える撮像面を有する。CPU26は、複数の撮像方向にそれぞれ対応する複数の撮像条件を登録し、撮像面の方向を繰り返し検出する。CPU26はまた、検出された方向に対応する撮像条件を複数の撮像方向と登録された複数の撮像条件とに基づいて調整する。
【効果】撮像条件を適応的に調整することができる。
(もっと読む)
撮像ネットワークシステムを構成可能な装置及びその制御方法
【課題】ネットワークシステムでの主従関係と、撮像システムでの主従関係とに従って動作しながら撮像ネットワークシステムを構成可能な装置であって、装置の数が動的に増減しても、撮像ネットワークシステムを適切に維持可能な装置を提供する
【解決手段】撮像制御命令を発行するマスター装置と、撮像制御命令を実行するスレーブ装置のうち、前記マスター装置として動作することが設定されている場合、ネットワークを構築してネットワークの管理装置としての動作を開始し、スレーブ装置として動作することが設定されている場合には、管理装置が構築したネットワークに参加する端末としての動作を開始する。
(もっと読む)
画像取得装置
【課題】 被検物の移動および調節に伴う振動を低減することができ、かつ振動低減の際に装置の質量分布の変化を低減することができる画像取得装置を提供することを目的とする。
【解決手段】 被検物の位置および姿勢の少なくとも一方を調節可能な調節機構102と、被検物の撮像における撮像条件を取得する予備計測部と、撮像条件に基づいて被検物を撮像する撮像部と、撮像部と予備計測部との間で被検物を移動させる回転テーブル101と、を有する画像取得装置であって、回転テーブル101の回転中心回りに、回転テーブル101とは逆方向に回転可能な回転カウンタ103と、調節機構102の駆動に応じて回転可能な調節カウンタ104と、を備え、回転カウンタ103および調節カウンタ104は、夫々の回転中心に対して回転対称形状であることを特徴とする。
(もっと読む)
撮影装置および映像生成方法
【課題】ステレオ映像の撮影前に2台のカメラ調整の基準とする基準カメラの位置調整を容易に行う。
【解決手段】ステレオ映像を撮影する撮影システムを構成する撮影装置であって、被写体を撮影し、映像信号を生成する撮影部と、前記生成した映像信号のうち少なくとも一部の映像信号に対して水平反転、垂直反転および水平垂直反転のうち少なくとも1つの反転方法を適用した反転信号を生成する生成部と、前記一部の映像信号および前記反転信号を合成した合成映像を出力する出力部と、を備える。
(もっと読む)
監視システム
【課題】監視システムの動作状態に関する試験(動作試験)を自動的に実施する手段を提供し、実際に人を侵入させて行う試験を必要とせず、動作試験およびパラメータ調整の作業を自動化する。
【解決手段】別途擬似的に入力映像に物体が侵入したように見える合成映像を作成する。動作確認試験時は、PTZ撮像装置より得られた映像の代わりに疑似映像を物体検出装置に入力し、入力映像と擬似物体画像を合成した位置の座標情報と物体検出装置で検出した位置の座標情報を比較し、その結果により該物体検出装置の動作が正常かどうかを自動的に判別する。更に、試験を複数の画像処理パラメータの組み合わせで自動的に実施し、ユーザの要求に従って最適なパラメータを自動的に決定する。
(もっと読む)
信号伝送装置
【課題】
固定部に対して回転可能な回転部から固定部に信号を光伝送するシステムにおいて、光軸ずれによる受光レベル変動を軽減する。
【解決手段】
固定部(121)に対して回転部(122)を回転可能に支持する機構中で、LED回路(101)がフォトダイオード(106)と対面する。測定モードで、回転部(122)の制御部(134)は、所定の回転角度位置でLED回路(101)を一定電流で駆動する。固定部(121)の制御部(153)は、フォトダイオード(106)の出力から各回転角度位置での受光レベルを計測し、その角度依存をEEPROM(154)に格納する。回転時、回転部(122)は、固定部(121)に回転角度位置を伝送する。固定部(121)の制御部(153)は、フォトダイオード(106)の出力を増幅する増幅回路(150)の増幅率を回転角度位置に応じた増幅率に制御する。
(もっと読む)
撮像装置
【課題】 本発明は、撮影者自身を簡単にパノラマ画像に写し込むことができる撮像装置を提供する。
【解決手段】 撮像装置は、撮像部、回転機構、回転制御部、顔検出部、撮影範囲設定部、位置情報設定部、パノラマ撮影受付部、撮影開始位置設定部、パノラマ撮影制御部及びパノラマ画像生成部を備える。撮像部は、画像を生成する。回転機構は、装置本体を回転させる。回転制御部は、回転機構を制御する。顔検出部は、動画像から顔を検出する。撮影範囲設定部は、撮影範囲を設定する。位置情報設定部は、顔の位置情報を設定する。パノラマ撮影受付部は、パノラマ撮影の開始の指示入力を受け付ける。撮影開始位置設定部は、動画像内の撮影者の顔の位置と、位置情報と、撮影範囲とに基づいて、装置本体を撮影開始位置に設定する。パノラマ撮影制御部は、パノラマ撮影を撮影開始位置から行なう。パノラマ画像生成部は、複数の画像からパノラマ画像を生成する。
(もっと読む)
旋回装置およびその制御方法
【課題】回転部の回転方向を適切に制御することにより、固定部と回転部との間で信号を伝達するスリップリングの長寿命化を実現する旋回装置およびその制御方法を提供する。
【解決手段】固定部120と回転部110とを含む旋回カメラ100は、固定部120と回転部110との間で信号を伝達するためのスリップリング102と、パン軸を中心として回転部110を時計回りおよび反時計回りに回転させることができるパンモーター106と、前記時計回りおよび前記反時計回りの一方よりも、スリップリング102の寿命が長くなる他方を回転方向として判定し、判定した回転方向に回転部110を回転させるようにパンモーター106を制御する制御部104と、を有する。
(もっと読む)
カメラ制御装置、カメラ制御方法及びカメラ制御プログラム
【課題】直感的にカメラの撮像方向を指示することのできるカメラ制御装置を提供する。
【解決手段】受信部101は、カメラの撮像画像の画像データと、カメラの撮像方向の水平方向の角度データとを受信する。記憶部105は、カメラアイコンデータと、地図データと、カメラ位置データとを記憶する。第1の合成部106は、地図上のカメラ位置にカメラアイコンを合成し、第2の合成部106は、カメラアイコンを基準として受信部で受信した角度データに応じた方向に、撮像画像を合成する。表示部107は、合成した画像を表示する。操作部108は、表示部107が表示した撮像画像に対する移動の操作を受け付ける。検出部104は、撮像画像に対する移動の操作を検出する。指示部105は、移動の操作のカメラアイコンに対する移動角度に応じてカメラにパンの駆動の指示を行う。
(もっと読む)
撮像装置、その制御方法及びプログラム
【課題】例えば優先度の高い優先監視領域が画角から外れないように撮像装置を制御することにある。
【解決手段】優先監視領域設定部105は、撮像された画像データに対して少なくとも一つの優先監視領域を設定するとともに、当該各優先監視領域について優先度を設定する。優先度判定部106は、各優先監視領域の優先度を比較する。駆動範囲設定部107は、優先度判定部106による比較結果に基づいて、撮像装置の駆動範囲を設定する。駆動制御部108は、設定された駆動範囲内で撮像装置を駆動させる。
(もっと読む)
電子機器、電子機器の制御方法、電子機器の制御プログラム
【課題】他の仕事から電子機器の操作に切り替えた場合に、電子機器を、ユーザがすぐに操作できる方向(向き)に調整を行なう際、ユーザが感じる煩雑さを低減する。
【解決手段】電子機器は、映像表示部近傍に設けられたカメラで撮像を行なう撮像部を備える。また、前記カメラで撮像された撮像画像の一部を検出する検出範囲の顔を検出する顔検出部を備える。また、前記検出された顔が前記検出範囲の中心近傍に位置するように前記映像表示部と前記カメラを移動させるように指示する移動指示部を備える。
(もっと読む)
撮像装置、その制御方法及びプログラム
【課題】ネットワークの帯域を抑えつつ、監視をおろそかにしないようにする。
【解決手段】制御部4は、n番目のプリセット位置とn+1番目のプリセット位置との間にサブ・プリセット位置を設定する。制御部4は、プリセット位置及びサブ・プリセット位置以外の位置では、撮像手段により得られる画像データを配信しないように制御する。
(もっと読む)
1 - 20 / 601
[ Back to top ]