
Fターム[5C122HB10]の内容
Fターム[5C122HB10]に分類される特許
161 - 180 / 3,259
動き画像領域判定装置またはその方法
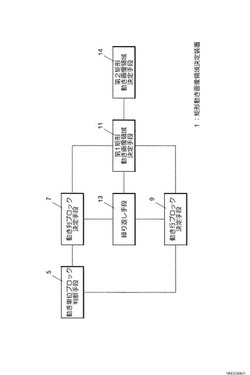
【課題】 簡易な構成で矩形動き画像領域を判定する。
【解決手段】 動き単位ブロック判断手段5は、各単位ブロックについて、比較対象のフレームの同じ位置の単位ブロックの代表値が閾値を超える場合には、動き単位ブロックとする。動き列ブロック決定手段7は、ある単位ブロックと同じ列に属する単位ブロックの集合を列ブロックとして定義し、各列ブロックに動き単位ブロックが存在する場合には動き列ブロックとして決定する。動き行ブロック決定手段9は、各行ブロックに動き単位ブロックが存在する場合には動き行ブロックとして決定する。第1矩形動き画像領域決定手段11は、動き行ブロックおよび動き列ブロックの双方に属する単位ブロックで特定される矩形領域を矩形動き画像領域として決定する。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記憶媒体

【課題】 撮像素子の駆動方式の変化によって、フリッカ成分が急激に変化した場合でも、精度良くフリッカ成分を補正可能な画像処理装置及び画像処理方法を提供する。
【解決手段】 撮像素子の駆動状態を制御する制御情報と、撮像素子から得られる画像信号から検出したフリッカ成分を用いて、フリッカ成分を補正するための補正値を予測して生成した補正値を適用してフリッカ成分の補正を行う。
(もっと読む)
オートフォーカス装置、該オートフォーカス装置を搭載した撮像装置、及び、該撮像装置を搭載した携帯電子機器
【課題】本発明は、オートフォーカスの時間を短縮できるオートフォーカス装置、撮像装置、及び、携帯電子機器を提供する。
【解決手段】被写体からの光を集光するレンズ13を収容するレンズホルダ15と、レンズホルダ15を介してレンズ13を移動させるアクチュエータ18と、アクチュエータ18を駆動・制御する駆動部20と、レンズ13を通して被写体像を撮像する撮像素子14と、レンズ13を所定位置へ移動させる際に駆動部20を制御し、かつ撮像素子14から出力される撮像信号の積算値を演算する制御部21とを備え、制御部21は駆動部20に対して、アクチュエータ18を介したレンズ13を現在位置から目標位置まで移動させるよう指示を行うと共に、レンズ13が目標位置へ移動し終わるまでの間にアクチュエータ18の移動速度を停止させるように、駆動部20へ停止信号を送信する構成を有している。
(もっと読む)
撮像装置、画像処理装置
【課題】帯域によって撮像光学系の異なる瞳領域を通過した光により撮影された画像から鑑賞用として好ましいカラーの立体視画像を得ることができる撮像装置等を提供する。
【解決手段】RGB画像を生成する撮像素子22と、被写体像を撮像素子22に結像する撮像光学系9と、第1の部分瞳を通過する撮影光束中のBの光を遮断しR、Gの光を通過させると共に、第2の部分瞳を通過する撮影光束中のRの光を遮断しB、Gの光を通過させる帯域制限フィルタ12と、R画像とB画像との位相差量を演算する距離演算部39と、位相差量に基づき、B、G画像のボケ重心位置をR画像のボケ重心位置の方向へ移動させた一の片目用カラー画像を生成すると共に、R、G画像のボケ重心位置をB画像のボケ重心位置の方向へ移動させた他の片目用カラー画像を生成することにより、カラーの立体視画像を生成するステレオ画像生成部40と、を備えた撮像装置。
(もっと読む)
防振制御装置、光学機器、撮像装置、及び防振制御方法
【課題】オートフォーカス動作中に生じる像倍率の急激な変化に伴う防振制御性能の低下を軽減しつつ、平行振れに対して高精度な像ブレ補正を行うこと。
【解決手段】撮像装置は角速度計108pと加速度計109pにより、装置に生じる角度振れと平行振れを検出する。角度振れ補正係数算出部313は角度振れに対する補正係数を算出し、平行振れ補正係数算出部314は平行振れに対する補正係数を算出する。カメラCPU106は、各補正係数を用いて角度振れ及び平行振れに対する補正量を演算する際、撮像光学系の合焦度を示す情報を取得し、合焦度が高い場合の補正係数に比べて、合焦度が低い場合の補正係数を小さくすることで補正量の変化を抑制する。角度振れ及び平行振れに対する補正量に従って駆動部112は振れ補正部110を駆動し、撮像光学系の像面に生じる像ブレを補正する。
(もっと読む)
撮像装置及びその制御方法
【課題】 階調補正の効果とノイズ量の増加とが適切にバランスした階調補正を実現すること
【解決手段】 適正露出量で撮像した場合に必要となる階調補正量を、測光センサで測定された被写体の輝度に基づいて算出する。そして、この階調補正量と、予め定められた、階調補正によって増加するノイズ量が許容可能な最大階調補正量との差分を最大露出低下量として、露出低下量を決定する。適正露出量よりも露出低下量分低い露出量で撮像し、撮像画像に対して露出低下量を補うための階調補正と、露出低下量を補った後の画像の輝度を補正するための階調補正とを適用する。
(もっと読む)
撮像装置、撮像システム及び撮像方法
【課題】顔が暗い場合でも顔の検出が可能で、且つノイズが目立たないような画像を得ることのできる撮像装置を提供する。
【解決手段】本発明の撮像装置1は、被写界を複数の領域に分割して測光する測光部16と、測光部による測光結果に基づいて第1の露出値BvCntl0を演算する第1露出演算部10aと、測光結果に基づいて第1の露出値BvCntl0に対して被写体の明部を復元するための補正量Pre_HiRcvを演算する補正量演算部10bと、測光結果に基づいて主要被写体を検出する主要被写体検出部10cと、主要被写体の輝度BvObjを演算する主要被写体輝度演算部10dと、主要被写体の輝度BvObjに基づいて補正量Pre_HiRcvを制限する補正量制限部10eと、制限された補正量に基づいて第1の露出値BvCntl0を補正した第2の露出値BvCntl1を演算する第2露出演算部10aと、第2の露出値BvCntl1に基づいて被写体を撮像して画像データを生成する撮像部14と、を備える。
(もっと読む)
画像処理装置、画像処理方法、及び撮像装置
【課題】カラー画像を入力画像として採用した場合であっても、大規模なローパスフィルタを用いずに照明成分を精度良く抽出する。
【解決手段】照明成分抽出部61は、ローパスフィルタを用いたフィルタ処理を実行した後、ダウンサンプリングを実行する平滑処理を複数回実行して入力画像Vから解像度の異なる複数の平滑画像を生成し、低解像度側の平滑画像のエッジ部分を上層の高解像度側の平滑画像で置き換えながらアップサンプリングする逆平滑処理を複数回実行することでカラー画像である入力画像Vから照明成分Lを抽出する。
(もっと読む)
ズームレンズ,撮像光学装置及びデジタル機器
【課題】画角が75度以上の比較的広角な焦点距離域を含んだ変倍比3倍程度のズームレンズであって、光学全長の短縮と防振時の高い光学性能を達成したズームレンズ,それを備えた撮像光学装置及びデジタル機器を提供する。
【解決手段】負正負正のズームレンズZLは、少なくとも第1群Gr1から第3群Gr3がそれぞれ移動して各群間隔を変化させることにより変倍を行う。第2群Gr2がその内部に少なくとも1つの空気間隔を有し、第2群Gr2内の最も像側の空気間隔を境として第2群Gr2を2つのレンズ群Gr2a,Gr2bに分け、その像側のレンズ群である第2b群Gr2bを光軸AXに対して略垂直な面内で移動させて(矢印mC)防振を行う。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム及び記憶媒体
【課題】ローリングシャッタ歪み成分を安定して正確に推定することができる画像処理装置、画像処理方法及び画像処理プログラムを提供する。
【解決手段】画像処理装置1は、画像入力部10、動きベクトル取得部11及び歪み成分推定部12を備える。画像入力部10は、複数のフレーム画像を入力する。動きベクトル取得部11は、2つのフレーム画像間の平行移動量を取得する。歪み成分推定部12は、フレーム画像間の動きを示す動き行列が平行移動成分及びローリングシャッタ歪み成分のみからなると近似し、平行移動量を用いてローリングシャッタ歪み成分に含まれる仮の歪み係数をフレーム画像ごとに算出し、算出された複数の仮の歪み係数を用いて歪み係数を推定する。
(もっと読む)
防振制御装置、光学機器、撮像装置、および防振制御方法
【課題】小型で機動性が高く、焦点距離や振れ補正範囲の変化によらずに、平行振れに対して高精度な像ブレ補正を行える防振制御装置および撮像装置を提供する。
【解決手段】角度振れ補正量算出部は、撮像光学系の光軸に対して直交する軸を中心とする装置の回転に伴って生じる角度振れを検出して像ブレの補正量を算出する。また平行振れ補正量算出部は、撮像光学系の光軸に対して直交する方向に沿う装置の並進に伴って生じる平行振れから像ブレの補正量を算出する。推定器905は振動モデルに基づくオブザーバ手段によって平行振れを推定する。平行振れ補正量算出部は、オブザーバ手段から得られる前記平行振れの推定量に基づいて平行振れの補正量を算出し、撮像光学系の焦点距離や振れ補正部111の補正範囲に応じて平行振れの補正量を変更する。平行振れの補正量は角度振れの補正量と合成され、振れ補正部111が駆動制御される。
(もっと読む)
パノラマ画像距離算出装置
【課題】パノラマ画像における2点間の三次元距離を算出することが可能なパノラマ画像距離算出装置を提供する。
【解決手段】パノラマ画像距離算出装置30は、第一の単眼パノラマ画像データ及び第二の単眼パノラマ画像データを生成する単眼パノラマ画像データ生成部34と、第一の単眼パノラマ画像データ及び第二の単眼パノラマ画像データを表示装置40へ出力する画像データ出力部35と、ユーザによる入力装置20の操作に応じて、第一の単眼パノラマ画像における始点及び終点を取得するとともに、第二の単眼パノラマ画像における前記始点及び前記終点を取得する始点終点取得部36と、第一の単眼パノラマ画像における始点及び終点並びに第二の単眼パノラマ画像における始点及び終点に基づいて、始点と終点との三次元距離を算出する三次元距離算出部37と、を備える。
(もっと読む)
撮像装置、プログラム及び手振れ補正方法
【課題】重力成分の影響を適切に判断して手振れ補正の補正精度を向上させることができる撮像装置を提供する。
【解決手段】被写体像を撮像する撮像素子と、装置本体における角速度及び加速度を検出する検出手段と、装置本体の姿勢を判定する判定手段と、検出された角速度及び加速度に基づいて、撮影光軸を回転させる角度ブレ及び撮影光軸を平行移動させるシフトブレが含まれるブレ量を、判定された姿勢に応じて、手触れ補正を行う方向の重力の影響の度合いに応じた重力成分を調整して算出する算出手段と、算出されたブレ量に基づいて手振れを補正する補正手段と、を備えた。
(もっと読む)
撮影表示制御システム
【課題】可視光および近赤外光の信号を用いた輝度の計算方法を切り替えることのできる撮影表示制御システムにおいて、車両の走行シーンに応じた適切な切り替えを行えるようにする。
【解決手段】撮像素子22が受光した可視光および近赤外光の強度に基づいて、各画素の輝度を算出する信号処理部23と、信号処理部23が算出した各画素の輝度に基づいた画像をディスプレイ9に表示させる画像認識部8と、を備え、画像認識部8は、可視光に基づく映像信号を出力するカメラ3から受けた映像信号に基づいて、近赤外光を強く反射または放出する被写体としてあらかじめ設定された被写体を画像認識によって探索し、探索の結果近赤外光を強く反射または放出する被写体が見つからなかった場合は、第1の算出方法で各画素の輝度を算出し、見つかった場合は第1の方法よりも輝度に対する近赤外光の強度の寄与が低くなるような第2の算出方法で各画素の輝度を算出する。
(もっと読む)
駆動装置並びにそれを有する雲台装置及びレンズ装置
【課題】 少ない部品数で原点検出と回転検知を実現し、原点検出と位置復帰を短時間で実行可能な駆動装置並びにそれを有する雲台装置及びレンズ装置を提供する。
【解決手段】 被駆動部を駆動する駆動部、駆動部を制御する制御部、複数の第1、2領域を有し第1、2領域が交互に有する被検出部、第1、2領域を検出する検出部を備え、被検出部は、移動方向における基準位置に対し、一方では、第1領域の中で相対的に狭幅の複数の第1領域と、一方の第1領域より広幅で互いに異なる複数の第2領域を有し、他方では、第2領域の中で相対的に狭幅の複数の第2領域と、他方の第2領域より広幅で互いに異なる複数の第1領域を有し、駆動装置が、特定位置へ移動させる際、制御部は駆動部を制御し、動作開始時において検出部で検出される領域に応じた方向に被駆動部を駆動し、検出領域の変化後、該領域のまま被駆動部が所定量以上移動すると駆動方向を反転する。
(もっと読む)
画像処理装置、カメラおよび画像処理プログラム
【課題】良好に異物影を検出できる画像処理装置を提供する。
【解決手段】画像処理装置は、検出された異物影100を補正する補正部を備える。補正部は、異物影100の周りを枠120で囲む枠形成部と、異物影内の補正対象画素100Aを選択し、その画素を通る直線x上の枠と交差する位置にある第一画素111及び第二画素112を選択し、直線y上の枠と交差する位置にある第三画素113及び第四画素114を選択する画素選択部と、第一画素と第二画素の輝度を用いた線形補完により補正対象画素の位置における第一補完輝度Y_xを求め、第三画素と第四画素の輝度を用いた線形補完により第二補完輝度Y_yを求め、第一補完輝度及び第二補完輝度について、補正対象画素が、枠のどちらかの直線に近づくにつれて重みが小さくなる加重平均により、第一補完輝度と第二補完輝度との平均補完輝度Y_aveを求める補完輝度算出部と、を備える。
(もっと読む)
撮像装置
【課題】焦点調節状態を検出する際にコントラスト情報を取得する撮影光学系の位置間隔を適切に決定すること。
【解決手段】撮像装置は、撮影光学系11による被写体像を撮像する撮像素子12と、撮影光学系11を光軸方向に移動させながら撮像素子12からの信号に基づいてコントラスト情報を取得し、該取得結果に基づいて撮影光学系11の焦点調節状態を検出する焦点検出部15と、焦点検出部15が焦点調節状態の検出を開始する前に、撮影光学系11の初期位置を含む所定範囲内の少なくとも3つの位置においてそれぞれ撮像素子12からの信号に基づいてコントラスト情報を取得し、該取得結果に基づいて、焦点検出部15が焦点調節状態を検出する際にコントラスト情報を取得する撮影光学系11の位置間隔を決定する決定部15と、を備える。
(もっと読む)
レンズシェーディング補正ファクタの算出方法及びそれを用いたレンズシェーディング補正方法及び装置
【課題】レンズシェーディング補正ファクタの算出方法及びそれを用いたレンズシェーディング補正方法及び装置。
【解決手段】本発明は撮像素子の特性に起因するレンズシェーディングを補正するための補正ファクタを算出する方法を提示するが、従来の方法よりメモリ使用量が顕著に減少した方法を提示する。本発明によれば、基準画像を撮影し、撮影された基準画像に対してレンズシェーディングパターンの特性を利用して補正ファクタを算出するか、指数スプライン関数を用いて画素値分布を近似化して近似化された画素値分布を用いて補正ファクタを算出する。また、本発明は算出された補正ファクタを用いてレンズシェーディングを補正する方法及び装置を提供する。
(もっと読む)
画像処理装置、撮像装置、制御方法、及びプログラム
【課題】複数の画像データを加重加算する領域で発生する位置ズレを低減することを可能とした画像処理装置、撮像装置、制御方法、及びプログラムを提供する。
【解決手段】撮像装置の画像処理部103の位置ズレ検出部106は、入力画像データ間の位置ズレ量を検出する。合成比率設定部107は、入力画像データを合成する際の合成比率を設定する。位置ズレ補正部108は、位置ズレ検出部106により検出された位置ズレ量と合成比率設定部107により設定された合成比率から座標変換係数を算出し、入力画像データに座標変換係数を用いて座標変換を施すことで、入力画像データ間の位置ズレを補正する。更に、入力画像データを加重加算する領域を優先させて位置ズレの補正を行う。画像合成部109は、位置ズレが補正された入力画像データを合成比率で合成する。
(もっと読む)
画像処理装置、カメラおよび画像処理プログラム
【課題】良好に異物影を検出できる画像処理装置および画像処理プログラムを提供する。
【解決手段】画像処理装置は、処理対象画像における異物影を検出する異物影検出部と、前記異物影検出部により検出された異物影を補正する補正部と、を備え、前記補正部は、前記異物影の内部に位置する補正対象画素100Aを選択し、かつ、前記異物影の外側であって、前記補正対象画素100Aを通る第一直線x上における該補正対象画素100Aを挟んで互いに反対側にある第一画素111と第二画素112とを選択し、前記第一画素111と前記第二画素112の輝度を用いた線形補完により求めた、前記補正対象画素100Aの位置における第一補完輝度を用いて、前記補正対象画素100Aの輝度を補正する補正処理を、前記異物影の画素全体について行う。
(もっと読む)
161 - 180 / 3,259
[ Back to top ]