
Fターム[5D088NN02]の内容
トラック変更、選択のためのヘッド移動 (342) | ヘッド移動速度制御 (152) | 実施例の記録担体 (44) | 磁気ディスク (39)
Fターム[5D088NN02]に分類される特許
1 - 20 / 39
磁気ディスク装置およびヘッドの制御方法
【課題】 ヘッドのアンロード動作の静粛性を向上することが可能な磁気ディスク装置およびヘッドの制御方法を提供する。
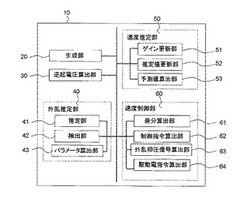
【解決手段】 実施形態の磁気ディスク装置は、情報記憶媒体に対して情報の書き込みと読み出しを行うヘッドと、両端に端子を有するコイルを有し、前記ヘッドを移動させるコイルモータと、前記コイルモータを駆動する駆動回路と、前記コイルの端子間電圧を検出する電圧検出部と、前記端子間電圧を用いて前記コイルの逆起電圧を算出する第1算出部と、前記ヘッドの移動速度の基準値である目標速度を生成する生成部と、前記逆起電圧を用いてサンプル時間ごとに前記ヘッドの第1速度と当該第1速度の誤差を推定し、当該誤差を減少させる方向に1サンプル時間後の第2速度を推定する第1推定部と、前記第2速度を前記目標速度に近づける方向に制御指令を算出する制御部とを備える。
(もっと読む)
ディスク記憶装置、ディスク記憶装置のコントローラ、ディスク記憶装置による制御方法及び電子機器

【課題】シーク動作の応答性能の更なる向上を可能とする。
【解決手段】ディスク記憶装置は、目標となるトラックにヘッドを移動させるシーク動作を行う際に、ディスクから読み出されたデータに含まれる複数の位置信号を読み出すタイミングを示す第1のタイミング信号に対し、複数の位置信号のそれぞれを読み出す期間を短くするとともに、それぞれの期間の中心時刻を複数の位置信号が記録された記録領域の中心に相当する復調中心時刻に近づけた第2のタイミング信号を生成し、生成されたタイミング信号に従って読み出された複数の位置信号をもとに、ヘッドの位置を復調する。
(もっと読む)
モータ駆動用半導体集積回路およびモータ用半導体集積回路
【課題】精度の高い駆動制御を行なうことができるコイルモータの駆動制御用半導体集積回路を得ること。
【解決手段】モータ駆動用半導体集積回路(200)は、回転駆動される磁気記憶ディスク上の記憶トラックに対して情報のリードを行なう磁気ヘッド(106)をディスク上で移動させるボイスコイルモータ(108)の駆動電流をボイスコイルモータのコイルに流れる駆動電流を検出しながらフィードバック制御により磁気ヘッドの移動を行なう。ボイスコイルモータをフィードバック制御する制御回路は、ボイスコイルモータのコイルに流れる駆動電流を検出する電流検出部、それにより検出された電流と与えられた電流指令値に基づいてボイスコイルモータのコイルに駆動電流を流すドライバ回路に対する駆動制御信号を生成するディジタル回路で構成された制御信号生成部(235)を備える。
(もっと読む)
磁気ディスク装置のロード・アンロード制御方法及び装置
【課題】通常のシーク動作に近い手法で正確にコイル抵抗を推定する。
【解決手段】VCMにより駆動されるアームに取り付けられたヘッドのロード・アンロード制御に必要なコイル抵抗とトルク定数を推定する方法であって、VCMのインダクタンスの過渡応答の影響が排除された制御系においてアンロードの開始前の少なくとも2つのタイミングでボイスコイルモータのヘッド速度とコイル端子間電圧を計測する計測ステップ(#118)と、指令電圧と計測された少なくとも2つのヘッド速度とコイル端子間電圧とに基づいてトルク定数とコイル抵抗を求める推定ステップ(#120)とを具備するコイル抵抗・トルク定数推定方法。
(もっと読む)
制御装置、記憶装置および制御方法
【課題】PWM駆動中のスイッチングの影響を抑えつつ消費電力を下げる。
【解決手段】ディスク16に対する情報の読み出しおよび書込みを行うヘッド15を移動するアクチュエータ(VCM13)をPWM信号により駆動可能なPWM駆動部と、ヘッド15の位置をシーク中の場合、および、ヘッド15の位置をシーク後であってディスク16に対する情報の読み出しまたは書き込みを行っていない場合に、PWM駆動部に駆動信号を送出する制御部とを含むサーボ制御部12を備える。
(もっと読む)
情報記憶装置
【課題】精度の高いヘッドの位置決めを短時間で行うことができる情報記憶装置を提供する。
【解決手段】所定規則によって配列された複数の制御マークが記録されているディスク状の記録媒体と、記録媒体を回転させる媒体駆動部と、記録媒体の表面に接触あるいは近接して記録媒体に対し情報再生およびまたは情報記録、制御マークの検知を行うヘッドと、ヘッドを保持し記録媒体の回転中心に対して接近乖離する方向に移動させるヘッド駆動部と、ヘッド駆動部に対して駆動力を制御する駆動力制御部と、媒体駆動部による記録媒体の回転に伴った、ヘッドによる複数の制御マークの検知間隔を時間の単位として用いてヘッド駆動部に対して駆動時間を制御する駆動時間制御部と、制御マークの規則に基づいた理想的間隔と制御マークの実際の間隔との差を入手し、その差に基づいて、駆動力制御部による駆動力の制御を修正する駆動力修正部とを備えた。
(もっと読む)
シーク制御装置、およびシーク制御のための制御データ生成方法
【課題】ショートシーク制御のセトリング時における応答劣化を低減し、かつ、アクセス時間の向上及び書き込みエラーの発生防止を図る。
【解決手段】シーク時の加速度データを生成する方法であって、シーク距離の入力、該シーク時間、またはシーク時間をサンプル時間で除算して得られるサンプル数の入力を受け付け、隣り合うサンプル時刻間の加速度変化率の2乗を重み係数で重み付けした値の総和を表す目的関数を、各サンプル時刻の加速度と、シーク時間またはサンプル数と、シーク距離とに基づいた制約条件の下、最小化するように最適化計算することにより各サンプル時刻における最適加速度を求める。または、加速度変化率の二乗和と加速度入力のパワースペクトルを評価するH∞ノルム、目標軌道のH2ノルム、および加速度入力の二乗和を評価項目とし、これらを同時最小化するLMI(線形行列不等式)を解くことによって最適加速度を求める。
(もっと読む)
磁気ディスク装置及び磁気ヘッドの制御方法
【課題】磁気ディスク装置のシーク制御において、外力に対してロバストなシーク制御系を構成できる磁気ディスク装置及び磁気ヘッドの制御方法を提供する。
【解決手段】磁気ディスクに情報を記録再生する磁気ヘッドを移動させる駆動部と、前記駆動部を制御する制御手段と、を備え、前記制御手段は、積分器と位相進み補償器とを有し、前記磁気ヘッドの目標位置と検出位置との差に基づいて位置指令を求めて前記駆動部をフィードバック制御する位置誤差フィードバック制御系と、前記磁気ヘッドの目標移動距離を入力し、前記駆動部の数式モデルを用いて電流指令を前記駆動部に出力する2自由度制御系と、を有し、前記制御手段は、前記磁気ヘッドの位置決め制御時と、シーク時と、の両時において、前記積分器の出力を前記駆動部に与えつつ、前記位相進み補償器の出力を用いて前記数式モデルを更新することを特徴とする磁気ディスク装置が提供される。
(もっと読む)
ハードディスクドライブ装置及びハードディスクドライブの温度制御方法
【課題】小型かつ簡易な構成で騒音及び消費電力の増加を伴うことなく筐体内部の温度上昇を抑制する。
【解決手段】ヘッド11と一体化されたヘッドアーム10を駆動するボイスコイルモータ9と、磁気ディスク13に対してデータの書込み又は読出しを行うヘッド11とが密閉状態で筐体内部に収容されたハードディスクドライブ装置1の発熱を制御する場合、筐体内部の温度を温度センサ12により検出し、検出した温度に基づいてハードディスクコントローラ2によりボイスコイルモータ9への駆動電流を制御し、ヘッドアーム10の駆動速度を可変することにより、筐体内部における温度上昇を抑制することができる。
(もっと読む)
磁気ディスク装置及び磁気ヘッドの制御方法
【課題】磁気ディスク装置のシーク制御において、外力に対してロバストなシーク制御系を構成できる磁気ディスク装置及び磁気ヘッドの制御方法を提供する。
【解決手段】磁気ディスクに情報を記録再生する磁気ヘッドを移動させる駆動部と、前記駆動部を制御する制御手段と、を備え、前記制御手段は、積分器と位相進み補償器とを有し、前記磁気ヘッドの目標位置と検出位置との差に基づいて位置指令を求めて前記駆動部をフィードバック制御する位置誤差フィードバック制御系と、前記磁気ヘッドの目標移動距離を入力し、前記駆動部の数式モデルを用いて電流指令を前記駆動部に出力する2自由度制御系と、を有し、前記制御手段は、前記数式モデルを更新し、前記更新に際して、前記積分器の出力は前記駆動部に与えつつ、前記位相進み補償器の出力を用いて前記数式モデルを更新する第1の更新モードを有することを特徴とする磁気ディスク装置が提供される。
(もっと読む)
車載用磁気ディスク装置、車載用磁気ディスク装置の制御方法
【課題】 この発明は、車両等の移動体に搭載されるHDD装置から発生する音を低減させることを目的としている。
【解決手段】 磁気ディスク(12)からリードされたデータを記録可能な不揮発性メモリ(22)と、車両の速度を受信する手段(20)と、受信した車両の速度を予め設定された第1の値または第2の値と比較する手段(20)と、比較された車両の速度が第1の値より大きいか、第1の値より小さく第2の値より大きいか、第2の値より小さいかを判別する手段(20)を備え、比較された車両の速度が第1の値より大きいと判別された場合は第1のヘッド移動速度(シーク速度)で磁気ディスクからデータを読み出し、第1の値より小さく第2の値より大きいと判別された場合は第2のヘッド移動速度(シーク速度)で磁気ディスクからデータを読み出し、読み出されたデータを不揮発性メモリ(22)に記録するように制御する。
(もっと読む)
磁気ディスク装置及び磁気ヘッドの制御方法
【課題】磁気ヘッドの下にデータセクタが来たときに速やかにデータを書き込むことができる磁気ディスク装置及び磁気ヘッドの制御方法を提供する。
【解決手段】磁気ディスクに情報を磁気的に記録再生する磁気ヘッドを移動させる駆動部と、前記磁気ヘッドの目標位置と検出位置との差に基づいて前記駆動部をフィードバック制御する位置誤差フィードバック制御系と、前記磁気ヘッドの移動前の位置と、前記磁気ヘッドの目標位置と、記録再生を行うデータセクタの位置と、に基づき、目標速度曲線を可変とし、前記駆動部の制御数式モデルを用いて前記駆動部の速度が前記目標速度曲線に追従するように前記駆動部を制御する速度制御系と、を備えたことを特徴とする磁気ディスク装置が提供される。
(もっと読む)
ディスク装置、制御装置およびプログラム
【課題】ディスク装置のロード時におけるヘッド速度の変化量を抑制し、ヘッド速度が目標値に収束する時間を早める。
【解決手段】ディスクと、ヘッドと、ヘッドを支持するアームと、入力される操作量に応じた速度でアームを軸を中心に回転運動させることによりディスクの面上および面外にヘッドを移動させる駆動部20と、ディスク上から退避したヘッドを収容するランプ部と、ヘッドをランプ部からディスク上へとロードする際のアームの移動速度を制御する制御部22とを備え、制御部22は、駆動部20によりアームを動かす場合に加わる外力を推定する推定部71と、推定された外力に応じて操作量を補正する補正部73とを有する。
(もっと読む)
VCMドライバと磁気ディスク制御装置
【課題】シーク動作の短縮化を図ったVCMドライバ及び磁気ディスク制御装置を提供する。
【解決手段】磁気ヘッドから読み出された位置情報と、コントローラからの位置指令情報とに対応して電流制御信号を形成する。VCMドライバは、上記制御信電流信号に従って上記磁気ヘッドの位置制御を行う。上記VCMドライバは、電流電圧変換部と駆動回路部と帰還回路とを有する。上記電流電圧変換部は、上記電流制御信号に対応した駆動電圧を形成する。駆動回路部は、上記電流電圧変換部で形成された駆動電圧を受けて、PWM動作により上記ボイスコイルモータの駆動電流を形成する。上記帰還回路は、上記駆動回路部の出力オフセット分を上記駆動電圧に負帰還させる。
(もっと読む)
シーク制御方法、シーク制御装置および媒体記憶装置
【課題】二自由度制御を行う現在オブザーバ制御によるシーク制御制御装置において、シーク制御からフォローイング制御への切り替え時の電流段差を防止する。
【解決手段】シーク制御からフォローイング制御への切り替え時に、電流段差解消軌道生成部(28)が、電流値u(n),u(n−1)の差分から段差分の電流値Udiffを計算し、この計算値を相殺する目標位置軌道r‘(n)(又は目標電流軌道)を、フォローイング用コントローラ(22)に供給する。このため、出力電流の電流段差が解消される。
(もっと読む)
二自由度位置制御方法、二自由度位置制御装置および媒体記憶装置
【課題】二自由度制御を行う現在オブザーバ制御による位置制御装置において、固定小数点のプロセッサを用いて、計算精度を向上する。
【解決手段】オブザーバを使用した二自由度制御系(26)の入力である目標位置軌道、位置誤差を基準軌道を基準とした相対値とし、オブザーバの状態変数が、基準位置からの相対的な距離を保持するようにした。絶対的な距離を保持する場合に比べて,値の変化する範囲が小さくなり、固定小数点方式でも、小数点の有効桁数を増加でき、計算精度が改善できる。このため、加速区間における制御電流が滑らかになり、共振や騒音の発生を防止でき、定速区間や減速区間では、残留振動の発生を防止でき、シーク時間を短縮できる。
(もっと読む)
2自由度位置制御方法、2自由度位置制御装置および媒体記憶装置
【課題】二自由度制御を行う現在オブザーバ制御による位置制御装置において、演算による出力遅延による位置精度劣化を防止する。
【解決手段】オーバーラン防止のための二自由度制御系において、二自由度制御の出力の遅延(演算遅延及び駆動アンプ、D/Aコンバータ等のハード遅延)を考慮して、サンプル時点から遅延分進んだTdの推定状態を演算し、この推定状態から出力を演算する。サンプル時点から、計算中に状態変化があっても、出力遅延の影響を防止し、精度の高い位置制御が可能となり、オーバーランを防止できる。
(もっと読む)
制御装置、記憶装置、サーボ情報復調プログラム及びサーボ情報復調方法
【課題】ヘッドの高速シークに伴って発生する該ヘッドの復調移動速度のオーバーフローを補正して、より正確な復調移動速度を得ることを可能とする。
【解決手段】本発明の磁気ディスク装置300の位置及び速度復調回路100は、同一セクタ内のサーボ情報であるEven1及びEven2のサーボ再生信号の位相差に基づいて磁気ヘッドの移動速度を復調する差分算出部105と、差分算出部105により算出された復調移動速度のオーバーフローを検出して該オーバーフローの補正値を計算するオーバーフロー検出部108とを備え、オーバーフロー検出部108により検出されたオーバーフローを補正値に基づいて補正してより正確な復調速度を出力する構成を取ることによって、ヘッドの高速シーク時においてもより正確な復調移動速度を得ることを可能とした。
(もっと読む)
制御装置、記憶装置、記憶媒体、サーボ情報復調プログラム及びサーボ情報復調方法
【課題】記憶装置において、復調速度の回転同期成分の誤差を補正し、補正された復調速度を使用してヘッドの移動速度の正確なフィードバック制御を行うことを可能とする。
【解決手段】本発明の磁気ディスク装置300の位置及び速度復調回路100は、同一セクタ内のサーボ情報であるEven1及びEven2のサーボ信号の位相差に基づいて磁気ヘッドの移動速度を復調する差分算出部105と、差分算出部105により算出された復調移動速度のオーバーフローを検出して該オーバーフローの補正値を計算するオーバーフロー検出部108とを備え、オーバーフロー検出部108により検出されたオーバーフローを補正値に基づいて補正し、該復調速度の回転同期成分の誤差の補正値でさらに補正してより正確な復調速度を出力する構成を取ることによって、ヘッドの高速シーク時においてもより正確な復調移動速度を得ることを可能とした。
(もっと読む)
ボイスコイルモータの制御回路、それを用いたディスク装置
【課題】ボイスコイルモータの逆起電圧を検出するためのキャリブレーションの精度を改善する。
【解決手段】検出抵抗Rsは、VCM1と直列に接続される。第1増幅器AMP1は、検出抵抗Rsの両端に発生する検出電圧Vsを増幅する。第1駆動回路10は、第1増幅器AMP1の出力電圧Vs1にもとづいて、VCM1を駆動する。第2増幅器AMP2は、第1増幅器AMP2により増幅された検出電圧Vsを、さらに増幅する。キャリブレーション回路14は、VCM1の回転が停止した状態において、VCM1の両端に発生するモータ電圧Vvcmが、第1、第2増幅器AMP1、2により増幅された検出電圧Vs2と一致するように、少なくとも第2増幅器AMP2の増幅率g2を調節する。第2駆動回路12は、検出電圧Vs2と、モータ電圧Vvcmとの差に応じた電圧を、逆起電圧として、VCM1の回転を制御する。
(もっと読む)
1 - 20 / 39
[ Back to top ]