
Fターム[5D096AA02]の内容
トラック探索、整列のためのヘッド移動 (3,141) | 第1実施例の記録担体 (432) | ディスク (424) | 磁気ディスク (408)
Fターム[5D096AA02]の下位に属するFターム
ディスクスタック (15)
フレキシブルディスク、FD、回転シート
Fターム[5D096AA02]に分類される特許
81 - 100 / 393
磁気記録媒体、磁気記憶装置および磁気記録媒体の製造方法
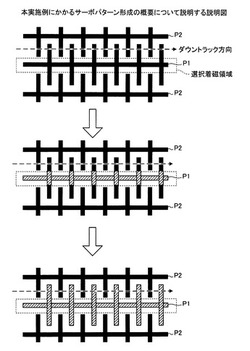
【課題】簡易な構成で、出力が大きく、安定なサーボパターンを形成すること。
【解決手段】サーボパターンを第1パターン群と第2パターン群に分け、サーボ情報エリアでは磁気ヘッドの進行方向に対して第1パターンと第2パターンとを交互に配置し、サーボ情報エリア以外の場所において前記第1パターンのみを配置した所定領域を設け、全ての第1パターンが所定領域に配置された部分とサーボ情報エリアに配置された部分とを有するように構成する。かかるサーボパーンに対し、一旦全体を同一方向に磁化した後、所定領域を選択的に磁化することで、第1パターン群と第2パターン群との磁化方向を反転させる。
(もっと読む)
周波数制御装置および記憶装置

【課題】サーボマークの検出ミスが発生した場合であっても、処理負荷少なく周波数補正量を算出する。
【解決手段】サーボフレームごとに計測されたクロック信号数を離散フーリエ変換して算出された偏心成分を予め記憶部に記憶しておく。さらに、記憶部に記憶されている偏心成分を用いてサーボフレームに対応するクロック信号数を算出し、算出したクロック信号数を用いて、サーボフレームに対応する周波数補正量を算出する。そして、算出した周波数補正量に応じて、周波数発振器においてクロック信号の発振に用いられる周波数が調整されるように周波数発振器の動作を制御する。
(もっと読む)
磁気記憶装置、ヘッド試験方法、ヘッド試験装置
【課題】サイドイレーズに関する測定においてリード用データパターンのライトによるサイドイレーズの影響を低減する磁気記憶装置、ヘッド試験方法、ヘッド試験装置を提供する。
【解決手段】磁気媒体のトラック方向に区切られる複数の区間とトラック方向に沿う所定の基準経路とを設定すると共に、基準経路に対するヘッドの位置であるオフセットについて隣接する区間同士のオフセットが異なるように区間毎に少なくとも1つのオフセットを設定する設定部33と、設定部により設定された区間毎のオフセットへ第1データパターンをライトし、基準経路へ所定の回数だけ第2データパターンをライトするライト部と、ライト部によりライトされた第1データパターンをリードするリード部と、リード部によりリードされた第1データパターンのそれぞれの品質の測定を行う品質測定部34とを有する。
(もっと読む)
情報記憶装置およびサーボ制御用フィルタ学習プログラム
【課題】ホスト側への応答が遅くならないように性能に対する影響を考慮しつつ、ヘッドの位置決め制御性能に対する振動の影響を抑制するために最適なサーボ制御用フィルタへの切替を実現することを課題とする。
【解決手段】ハードディスク装置は、記録再生エラー発生時に、位置誤差信号を各サーボ制御用フィルタを通して得た制御電流を用いて位置決め制御を行ったときの記録再生ヘッドの現在位置から振動量を算出する学習を、所定時間、複数のサーボ制御用フィルタのそれぞれに対して順番に行い、測定した振動量が最小のサーボ制御用フィルタに位置誤差信号を通して得た制御電流を用いて、記録再生ヘッドの位置決め制御を行う。
(もっと読む)
磁気記憶装置
【課題】サーボパターンで確実に磁化を維持することができる磁気記憶媒体および磁気記憶装置を提供する。
【解決手段】サーボパターンではN極またはS極に着磁された磁性体が少なくとも記録トラックの線方向に離散的に非磁性体中に配列される。読み出しヘッド素子56は磁性体から漏れ出る磁界に基づき再生信号を出力する。再生信号は0Vの基準電圧から磁極に応じて正負に振れる。整流回路71は、その再生信号に基づき、正負の一方に振れる再生信号を生成する。磁気記憶媒体では隣接するN極およびS極の磁性体で磁化は安定化する。こうした磁性体では磁化反転は回避される。
(もっと読む)
情報記憶媒体および情報記憶装置
【課題】記憶容量の増加が可能な情報記憶媒体および情報記憶装置を提供する。
【解決手段】情報記憶媒体において、基板S、および、径方向の位置を表す情報が記録されたサーボパターン22と、周方向に所定のピッチsで並んだ複数の記録ドット26とをそれぞれ有する、周方向に並んだ複数のセクタ21を有し、サーボパターン22は、記録ドット26のピッチsに対し所定の整数比を有するピッチpで周方向に並んだ磁気パターン221を有し、サーボパターンに最近接位置に配置された記録ドット26が、サーボパターンのピッチpに対し、いずれのセクタにおいても一定の位相関係φを有する位置に配置されている。
(もっと読む)
ディスク・ドライブ及びサーボ・データ検出のための処理タイミングの制御方法
【課題】、効率的な処理によってサーボ・セクタ間の時間間隔の変化に応じてタイミングを調整する。
【解決手段】本発明の一実施形態のHDDは、ユーザ・データのリードあるいはライトのためのフォローイング中にサーボ・セクタの時間間隔を測定し、その測定結果に応じてサーボ・セクタ検出のためのタイミング信号を制御する。HDDは、時間間隔の測定結果を規定の複数ゾーンの内のいずれに含まれるか特定する。過去の複数の時間間隔のゾーンによって時間間隔の変化について判定し、時間間隔の変化が規定範囲にある場合にサーボ・セクタ検出のためのタイミングを変化させる。これにより、効率的な処理によってサーボ・セクタ間の時間間隔の変化に応じてタイミングを調整することができる
(もっと読む)
記録媒体及び記録再生装置
【課題】高密度記録媒体において、データ記録容量を低下させることなく、記録再生装置に対して高精度トラッキングを可能とする記録媒体を提供する。
【解決手段】磁気記録媒体4は、情報を記録する磁気記録部2と、情報が記録されない非磁気記録部3とを有するトラック間に、該トラック間を磁気的に分離するための非磁性ガイド部1が配置されている。非磁気記録部3は非磁性ガイド部1と連続して形成されている。磁気記録媒体4は、第1のトラックTr1,第2のトラックTr2の非磁気記録部3の少なくとも一部と、第3のトラックTr3の磁気記録部2の一部とが等しいトラック方向位置にある第1の領域、及び、第1のトラックTr1,第3のトラックTr3の非磁気記録部3の少なくとも一部と、第2のトラックTr2の磁気記録部の一部とが等しいトラック方向位置にある第2の領域を少なくとも1組有する。
(もっと読む)
媒体アクセス方法及び磁気記憶装置
【課題】媒体アクセス方法及び磁気記憶装置において、記録再生ヘッドのコア幅を非常に狭くすることなく磁気記録媒体上の記録密度を向上可能とすることを目的とする。
【解決手段】各トラックが1又は複数の磁性ドット列で形成された磁気記録媒体に対し、スキュー角がゼロの位置を含む前記磁気記録媒体上の全ての位置において、トラック方向と垂直な方向に対して傾いた姿勢のヘッドでトラックを走査し、前記ヘッドのコア幅は、1トラックを走査中に同時に2以上の磁性ドットを走査しないように、磁性ドットのトラック方向上のピッチ及び前記垂直な方向上のピッチに対して設定されているように構成する。
(もっと読む)
磁気ディスク装置のヘッド位置決め制御方法
【課題】位相特性を改善して制御系の安定性を維持する制御方法を提供すること。
【解決手段】フィードバック制御器31は、制御対象35である磁気ヘッドを磁気ディスク上の目標位置へ移動させるための制御操作量を決定する。また、共振抑圧フィルタ33によって、制御操作量の第1の周波数成分を抑制する。共振フィルタ34によって、制御操作量の第2の周波数成分を増大させる。抑制及び増大後の制御操作量に応じて、アクチュエータがヘッドを磁気ディスク上の目標位置へ移動させる。
(もっと読む)
磁気記録装置
【課題】磁気記録装置において高い読み取り、書き込みのデータ信頼性を得るためには、サーボトラックの偏芯に対するR/Wオフセットの誤差は非常に大きなものとなっており、この偏芯を考慮しないで各サーボトラックに対して一定のR/Wオフセットでデーターの読み書きを実行してしまうとデーターの読み取り信頼性が低下してしまう。
【解決手段】ヘッド位置算出部は、書き込み時のリードヘッドの目標位置と、読み取り時のリードヘッドの目標位置のうち少なくとも一方を、その目標位置における前記磁気ディスクの半径位置と円周方向の位置より算出する。
(もっと読む)
磁気記憶装置、及び磁気記憶プログラム、ならびに磁気記憶方法
【課題】磁気記憶媒体における異なるサーボライト方式によるサーボパターンに対して共通のファームウェアを用いて起動時間を短縮することができる磁気記憶装置、磁気記憶プログラム、磁気記憶方法を提供する。
【解決手段】 記憶媒体(磁気ディスク11)においてサーボライト方式が異なるサーボパターンが混在する記憶装置(磁気ディスク装置1)であって、記憶媒体のサーボパターンを読み込む読込部(磁気ヘッド15)と、読込部により読み込まれたサーボパターンに基づいて、サーボライト方式の特定を行う識別部(MCU21)と、識別部により特定されたサーボライト方式の情報を格納する格納部(バッファ24)と、サーボライト方式の情報に基づき、最適なサーボ制御方式を設定する設定部(MCU21)とを備えた。
(もっと読む)
情報記憶装置
【課題】ライト時のヘッドの位置決め制御をより正確に行うとともに、リード時のヘッドの位置決め制御を正確に行うことを課題とする。
【解決手段】サーボフレーム0およびサーボフレーム1上に記録ヘッドの位置ずれを補正するためのライト用補正データを記録する場合、隣接するトラック0とトラック1、トラック1とトラック2、トラック2とトラック3、トラック3とトラック4、トラック4とトラック5等の記録領域で互いに隣接しないように、トラック方向にずらしてライト用補正データを記録する。なお、サーボフレーム0上のトラック(0、2、4等)の記録領域には、トラック方向で前方に配置されている3つのサーボフレーム1〜3のライト用補正データが記録される。また、サーボフレーム1上のトラック(1、3、5等)の記録領域には、トラック方向で前方に配置されている3つのサーボフレーム2〜4のライト用補正データが記録される。
(もっと読む)
制御装置、制御プログラム及び方法
【課題】ニューラルネットワーク制御に係る処理負荷を軽減させる制御装置、制御プログラム及び方法を提供する。
【解決手段】互いにネットワーク構成が異なる複数のニューラルネットワークのうち、所定のニューラルネットワークである第1ニューラルネットワークを選択し、複数のニューラルネットワークのうち、第1ニューラルネットワークとは異なるニューラルネットワークである第2ニューラルネットワークを選択し、第1ニューラルネットワークによる制御と、第2ニューラルネットワークによる制御とによる制御誤差を測定し、第1ニューラルネットワークによる制御誤差と、第2ニューラルネットワークによる制御誤差とを比較し、より制御誤差が低いニューラルネットワークを判断する選択部16と、選択部16によってより制御誤差が低いと判断されたニューラルネットワークによりシステムの動作を制御する算出部16及び最終コントローラ102とを備える。
(もっと読む)
磁気ディスクおよび磁気ディスク装置
【課題】 トラッキング制御に際して不感帯をなくし、トラックに沿った磁気情報の読み書きを正常に行うことができる磁気ディスクを提供する。
【解決手段】 磁気ディスクは、磁気ヘッドのリードコア幅Rcwに応じたディスク径方向のトラックピッチTpで複数のトラックTをなすように、非磁性領域内に複数の第1磁性部Mを形成してなるデータ記録領域20と、ディスク径方向に所定のピッチ間隔Spで並んだ複数の基本単位からなるバーストパターン21A〜21Dがディスク周方向に複数の列をなし、かつ、互いに隣り合うバーストパターンの列同士で基本単位がピッチ間隔Spの1/2幅または1/4幅だけディスク径方向にずれるように、非磁性領域内に複数の第2磁性部M’を形成してなるバーストパターン領域21とを有し、Tp<Sp/2<2Tpが成立している。
(もっと読む)
ヘッドのサーボ制御システム及びヘッドのサーボ制御方法
【課題】複数のアダプティブ・ピーク・フィルタを有するヘッドのサーボ制御システムにおいて、他の処理への影響を小さくしつつ各アダプティブ・ピーク・フィルタの外部振動への適応化を効果的に行う。
【解決手段】本実施形態のHDDは、そのサーボ制御システム内に複数のアダプティブ・ピーク・フィルタ234a、234bを有している。HDDは、外乱によるヘッド振動のピーク周波数と振幅を推定し、ヘッド振動を抑圧するように複数のアダプティブ・ピーク・フィルタを適応化する。HDDは、複数のアダプティブ・ピーク・フィルタから一部を選択し、その一部のアダプティブ・ピーク・フィルタについて適応化のための処理を行う。これにより、サーボ・サンプリング間におけるラン・タイムを低減して他の処理への影響を避けると共に、各アダプティブ・ピーク・フィルタを外部振動に対して適切に適応させる。
(もっと読む)
改良されたサーボデータ動作のためのシステム及び方法
本発明の様々な実施形態は、記憶媒体に関連してヘッドの位置誤差を効率的に決定するためのシステム、方法、及び媒体フォーマットを提供する。ある場合では、一連のデータを有する記憶媒体を含むシステムが開示される。一連のデータは第1の定義マーカ、及び第1の定義マーカから離れて配置される第2の定義マーカ、並びに位置決めデータを含む。このシステムは、第1の定義マーカを検出して第1の定義マーカの場所を確立するように動作可能である第1の検出回路、及び第2の定義マーカを検出して第2の定義マーカの場所を確立するように動作可能である第2の検出回路をさらに含む。このシステムは誤差計算回路及び補間回路をさらに含む。誤差計算回路は第1の定義マーカの場所及び第2の定義マーカの場所に少なくとも部分的に基づいて補間オフセットを計算するように動作可能である。補間回路は位置決めデータを補間して補間された位置決めデータを提供するように動作可能である。 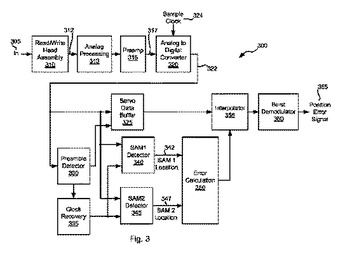 (もっと読む)
(もっと読む)
磁気記憶装置
【課題】磁気記憶装置において、トラックピッチ異常が発生してもライト位置とリード位置を合わせてエラーレートの悪化を防止可能とすることを目的とする。
【解決手段】QM値又はAGCゲイン値をヘッドがトラックセンタからオフセットされた複数のオフセット位置で測定し、QM値又はAGCゲイン値とオフセット位置からQM値又はAGCゲイン値と各オフセット量の関係を表す多項式を生成する。生成した多項式からトラックセンタからのずれ量をゼロにするオフセット量を、サーボパターンのトラックピッチむらの補正値として求める。トラックピッチむらは、この補正値に基づいてヘッドの位置を制御することで補正される。
(もっと読む)
マルチレートシステムコントローラの性能評価方法、マルチレートシステムコントローラ選択方法及びディスクドライブのコントローラの性能決定方法
【課題】新規且つ改善された、マルチレートシステムの周波数応答の特徴付けの提供。
【解決手段】閉ループ環境で動作するマルチレートシステムの機械的な構成要素の周波数応答が特徴付けられる。関心周波数とそのエイリアス周波数のそれぞれにおいて、マルチレートシステムへの入力として外乱が加えられ(ステップ503)、マルチレートシステムの応答の測定結果からなる行列方程式が解かれ、関心周波数及びそのエイリアス周波数のそれぞれにおける周波数応答が計算される(ステップ506)。結果として得られる周波数応答はシステム全体の伝達関数を合成するのに使用でき、更なる周波数応答の測定を必要とせずに、多数のコントローラ設計の相対的な性能のシミュレーション及び評価が可能となる。
(もっと読む)
磁気記憶媒体および磁気記憶媒体駆動装置
【課題】電子線描画に適応し、高い精度で電磁変換素子のトラッキングサーボ制御を実現することができる磁気記憶媒体を提供する。
【解決手段】バーストライン41では、半径方向に繰り返される規定の繰り返しパターンで非磁性体中に磁性体64a、64b、65a、65bが配置される。バーストライン41同士の間では円周線に対して繰り返しパターンの位相が半径方向にずらされる。トラッキングサーボ制御にあたって磁気ヘッドの読み出し素子は1円周上でバーストラインを横切る。バーストラインの繰り返しパターン中では部分的に1円周上に非磁性体領域が確立されるものの、繰り返しパターンの位相は半径方向にずれることから、全てのバーストラインで共通の1円周上に非磁性体領域が配置されるわけではない。読み出し素子が1円周上で複数本のバーストラインを横切ると、常に所定レベル以上のゲインが確保されることができる。
(もっと読む)
81 - 100 / 393
[ Back to top ]