
Fターム[5D096AA03]の内容
トラック探索、整列のためのヘッド移動 (3,141) | 第1実施例の記録担体 (432) | ディスク (424) | 磁気ディスク (408) | ディスクスタック (15)
Fターム[5D096AA03]に分類される特許
1 - 15 / 15
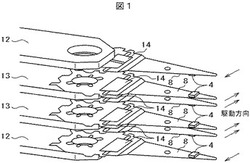
磁気ヘッド駆動装置およびそれを用いた磁気ディスク装置
【課題】
励起されるアームモードの数を一つにし、すべてのヘッドの励起されるアームモードの周波数応答を同位相にすることで、制御コントローラの位相ロスを減らし、制御系の安定を確保した高精度の位置決め精度を可能とする。
【解決手段】
マイクロアクチュエータ8とメインアクチュエータを搭載する磁気ヘッド4駆動装置において、両端アーム12のマイクロアクチュエータ8どうしは同方向に駆動し、中間アーム13のマイクロアクチュエータ8は前記両端アーム12のマイクロアクチュエータ8の駆動方向と反対方向に駆動する。
(もっと読む)
磁気ディスク装置における磁気ヘッドの位置決め制御のためのフィードフォワード制御回路の設計方法、同設計方法により設計されたフィードフォワード制御回路を有する磁気ディスク装置及び同設計方法により設計されたフィードフォワード制御回路

【課題】ディスクフラッタの影響を効果的に低減可能な磁気ディスク装置における磁気ヘッドの位置決め制御が可能な構成を提供することを目的とする。
【解決手段】磁気ディスクを回転させた状態で当該磁気ディスクの振動を測定し、振動のスペクトラムから磁気ディスクフラッタによる振動の周波数であるフラッタ周波数を求め、フラッタ周波数の各々に対しゲインのピークを有する、フラッタ周波数毎のフィルタを設計し、フラッタ周波数毎のフィルタを合成することにより前記磁気ヘッドの位置決め制御のためのフィードフォワード制御回路を得る構成とした。
(もっと読む)
位置決め制御システムおよび位置決め制御方法
【課題】磁気ディスク装置において、高精度のヘッド位置決めを行う。
【解決手段】ディスクに対してヘッドを移動させ、ヘッドの位置を検出し、目標位置に対するヘッド位置の誤差を表す位置誤差信号を所定時間間隔で検出し、検出される位置誤差信号をディスク回転の1周期単位で記録し、非周期外乱を検出する外乱検出ステップと、第1の回転周期において検出された第1の位置誤差信号を、第1の位置誤差信号の1周期時間前に検出された第2の位置誤差信号に基づいて補正し、補正された第1の位置誤差信号から、ヘッドの規範位置指令を計算し、1の回転周期の1周期前の第2の回転周期において非周期外乱が検出され、かつ、第2の位置誤差信号が検出されたヘッド位置の検出時点が、非周期外乱の検出時点を基準として所定時間範囲に含まれるときは、第2の位置誤差信号の振幅を抑制し、振幅抑制した第2の位置誤差信号に基づき第1の位置信号誤差を補正する。
(もっと読む)
ヘッド位置制御方法、ヘッド位置復調装置及びデイスク装置
【課題】複数枚のデイスク間の円周方向のサーボ信号の位置ずれを有するデイスク装置の補正方法に関し、位置ずれによる、ヘッド切換え時の動作低下を防止する。
【解決手段】ヘッド切り替え時に、デイスク(10)の半径方向に分割された各領域で、各ヘッドのサーボ信号の時間変動を測定して得た測定値により得た、各ヘッドの前記領域の時間変動の平均値と、デイスク(10)の回転周波数と同一の周波数の正弦波で示す時間ずれ情報とから、切り替え前後のヘッドのセクタ位置の領域の平均値と正弦波で示す時間ずれ情報を取り出し、取り出した平均値と正弦波で示す時間ずれ情報から、前記円周方向の時間ずれ値を計算し、前記円周方向の時間ずれ値が所定値以下の場合には、更に、1セクタ分の時間を、前記円周方向の時間ずれ値に加算し、切り替え前のヘッドのサーボセクタ番号を1増やして、前記切り替え後のヘッドのサーボセクタ番号とする。
(もっと読む)
複数対の埋込みサーボバーストを使用したディスク駆動装置
【課題】アクチュエータアーム上の変換ヘッドのトラックへの位置決め精度を向上させるとともにトラックシークタイムを短縮する。
【解決手段】データトラック内の少なくとも1つの事前記録されたサーボセクタ20は、4つの時間的に互い違いとされたサーボバースト50を含む。サーボバーストの第1対および第2対は一般にバースト幅だけ互いに半径方向に偏倚され、これによりそのバースト対の各々の縁は実質的に同一線上にあってトラック空白を形成している。第1対はバースト幅の2分の1の幅だけ第2対から半径方向に偏倚している。第1対は第1相対振幅を決定するために読出され、第2対は第2相対振幅を決定するために読出される。事前記録されたサーボバースト50は、幅および数を変化され、それが位置されるデータトラック18に複数のトラック空白を形成するようになされる。
(もっと読む)
ヘッド位置制御方法、ヘッド位置制御装置及びデイスク装置
【課題】複数枚のデイスク間の半径方向のサーボ信号の位置ずれを有するデイスク装置の補正方法に関し、位置ずれによる、ヘッド切換え時の動作低下を防止する。
【解決手段】デイスクの偏心に合わせて、各デイスク面の半径方向位置ずれを測定し、且つデイスク上のトラック番号を、基準ヘッドを基準とした各ベッドの半径方向の位置ずれ値を格納するテーブルを設け、上位からの論理ブロックアドレスを、テーブルで、物理アドレスに変換する。このため、装置個体ごとの半径方向位置をそろえることができる。
(もっと読む)
ヘッド位置制御方法、ヘッド位置制御装置およびディスク装置
【課題】外乱抑圧機能を持つオブザーバ制御による位置決め制御装置において、オブザーバの制御特性を損なうことなく、外乱抑圧機能を付加する。
【解決手段】アクチュエータのモデル(34〜44)と外乱のモデル(50)を分離し、外乱モデル(50)は、感度関数を整形する分母と分子の次数が同一のフィルタの前記分子を分母とした伝達関数で定義された外乱モデルから求めた推定ゲインを用いて、状態情報を生成し、前記状態情報から前記アクチュエータ(1)の外乱抑圧値を演算する。オブザーバの制御特性を損なうことなく、広い範囲の外乱周波数に適応して、ヘッドの振動を防止することができる。
(もっと読む)
位置決め制御装置の整定判定方法及び位置決め制御装置
【課題】対象物が目標位置に整定したことを判定する整定判定方法において、高速且つ正確に整定判定する。
【解決手段】対象物を目標位置と現在位置との位置誤差で位置制御する位置制御装置において、対象物が目標位置の位置決め精度内に整定したことを判定する整定判定ブロック(24)に、判定スライス値と連続サンプル数とが異なる判定ブロック(54−1〜54−n)を複数設け、位置誤差を判定式で計算した判定値を、異なる判定スライス値と連続サンプル数の各々の判定ブロック(54−1〜54−n)で判定し、判定結果の論理和(56)を出力する。整定判定式に応じて、高速且つ正確に整定判定でき、位置決め精度の向上と高速判定の両立が可能となる。
(もっと読む)
ヘッド位置制御方法、ヘッド位置制御装置およびディスク装置
【課題】外乱抑圧機能を持つ外乱オブザーバ制御による位置決め制御装置において、外乱周波数を抑圧しても、制御特性の変更を防止する。
【解決手段】アクチュエータのモデルと外乱のモデルを含む外乱オブザーバ制御により、推定位置誤差に従い、アクチュエータの推定ゲイン(L1〜L2)と外乱の推定ゲイン(L4,L5)を用いて、アクチュエータ(1)の制御値を演算する際に、推定位置誤差e[k]に従って、外乱周波数を推定し、前記外乱周波数に対応したアクチュエータ(1)の推定ゲイン(L1,L2)と外乱の推定ゲイン(L4,L5)を変更する。外乱周波数に応じて適切なオブザーバ制御が実現できる。
(もっと読む)
ディスク装置、位置決め制御回路及びそれを用いた情報処理装置
【課題】外乱抑圧機能を持つ位置決め制御系を持つディスク装置において、早期に外乱を抑圧して、ヘッドの振動を防止する。
【解決手段】ディスク装置(20)の外乱抑圧機能を有する位置決め系(14)に、外部(50)から、既知の外乱周波数を初期値にセットするためのインターフェース回路(11−1)を設けた。直ちに、未知の外乱周波数を抑圧し、又は、既知の外乱周波数からスタートし、以降、周波数が変化しても、推定周波数は、それに追従でき、早期にヘッド(3)の振動を防止できる。
(もっと読む)
位置検出回路、情報記録装置及び磁気ディスク装置
【課題】本発明は、サーボ領域の読み取りタイミングのトラック間のズレを補正する位置検出回路を提供する。
【解決手段】ロータリーアクチュエータによる磁気ヘッド(H)の軌跡が、磁気ディスク媒体(M)の径方向軸に対して有する位相遅れから、媒体(M)を回転させたときにサーボパターンが読み出されるまでの遅延時間を半径位置に対して求め、サーボ読み出し時に使用するサーボゲート信号の生成遅延時間に反映させる(1、10、12)。
(もっと読む)
ヘッド位置制御方法、ヘッド位置復調装置及びデイスク装置
【課題】複数枚のデイスク間の円周方向と半径方向のサーボ信号の位置ずれを有するデイスク装置の補正方法に関し、位置ずれによる、ヘッド切換え時の動作低下を防止する。
【解決手段】ヘッド切り替え時に、デイスク(10)の偏心に合わせて、サーボゲート時刻をテーブル(62)で修正するため、信号を正確に検出できるようになり,サーボ信号の検出精度が向上する。更に、半径方向ずれ対策として、デイスク(10)上のトラック番号を、基準ヘッドを基準としたずれ値で、テーブル(46)で変換するため、装置個体ごとの半径方向位置をそろえることができる。
(もっと読む)
マイクロアクチュエータ及びマイクロアクチュエータを備えたヘッドジンバルアセンブリとディスクドライブユニット
【課題】 磁気ヘッドの不適当な移動を阻止し、磁気ヘッドの位置を良好的に調節することができるマイクロアクチュエータを提供する。
【解決手段】 本発明のマイクロアクチュエータは、支持枠と、該支持枠に接合されている少なくとも一つの圧電素子とを含み構成である。支持枠は、ベースと、可動型プレートと、該ベースと可動型プレートを連結するためのリーディングビームと、可動型プレートの両側から延在する磁気ヘッド支持アームとを備えている。圧電素子は、ベースの自由端と可動型プレートを接続させ、少なくとも一つの圧電素子が発動される際に、可動型プレートは第一又は第二方向に揺動する。また、本発明では、マイクロアクチュエータを用いたヘッドジンバルアセンブリ及びディスクドライブユニットを提供する。
(もっと読む)
サーボ情報書き込み方法
【課題】 ディスクフラッタを考慮し、サーボトラックライト精度を向上させることが可能なサーボ情報書き込み方法を提供することにある。
【解決手段】 ディスクドライブに搭載されたヘッドの位置決め制御を実行するステップと、この位置決め制御により、位置決め誤差を補正するための位置決め補正情報を生成するステップと、先のステップにより生成された位置決め補正情報を、ディスクドライブの外部に設けられる記憶手段に記録するステップと、先の生成ステップにて生成された位置決め補正情報を取得して、ディスクドライブに組み込まれた第1のディスク媒体の第1の面と第2のディスク媒体の第2の面上に新たなサーボ情報を同時に書き込むステップとを有する手順を実行するサーボ情報書き込み方法。
(もっと読む)
ヘッド位置決め装置および情報記録再生装置
【課題】振動発生を抑制した安定性の高いヘッド位置決めを実現するとともに、微動アクチュエータの変位の頻度を少なくして該微動アクチュエータの特性劣化を防止しうるヘッド位置決め装置を提供する。
【解決手段】同軸状の複数の情報記録ディスクに対してそれぞれアクセスを行う記録/再生用の複数のヘッドと、各ヘッドを微小変位させる複数の微動アクチュエータと、各微動アクチュエータを支持する複数のヘッド支持機構と、複数のヘッド支持機構を一括駆動する粗動アクチュエータとを含み、各ヘッドが前記ディスクから読み取ったヘッド位置信号に基づいて対応する各ヘッドが目標トラックに追従するように各微動アクチュエータを制御するように構成するとともに、各微動アクチュエータの相対変位値のうちの中央値を選択し、選択した中央値に基づいて粗動アクチュエータを制御する。
(もっと読む)
1 - 15 / 15
[ Back to top ]