
Fターム[5D096BB01]の内容
トラック探索、整列のためのヘッド移動 (3,141) | 第1実施例の主情報トラックの形状 (308) | 同心円状 (287)
Fターム[5D096BB01]に分類される特許
101 - 120 / 287
ディスク装置およびその制御方法
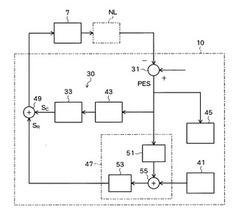
【課題】ヘッドの位置制御系の非線形性を適切に測定することが可能なディスク装置およびその制御方法を提供する。
【解決手段】磁気ディスク装置1は、基準信号SRをボイスコイルモータ7に入力するとともに、基準信号SRに起因する高調波成分が抑制された制御信号SCをボイスコイルモータ7に入力し、基準信号SRと、高調波成分が抑制された制御信号SCとがボイスコイルモータ7に入力された状態で得られる誤差信号PESを測定する。
(もっと読む)
磁気記録装置のヘッド位置決め方法

【課題】構成的な追加を必要とせずヘッドの位置決め精度を向上することができ、安価にかつ信頼性の高いデータ信号の読み取りを実現することができる磁気記録装置のヘッド位置決め方法を提供する。
【解決手段】ヘッド位置決め計算式の切り換え領域へのデータの書き込み時には、その切り換え領域からヘッドをオフトラックさせて切り換え領域でのヘッドの位置決めをなくすことにより、磁気記録装置の回路および機構の構成的な変更をすることなく、精度の高いヘッドの位置決めを可能にする。
(もっと読む)
ハードディスクドライブのオフトラックイベント方法及び装置
【課題】新規且つ改善された、ハードディスクドライブのオフトラックイベント方法及び装置の提供。
【解決手段】第1のデータオペレーションにおいてオフトラックイベントが生じた後に、適切な第2のデータオペレーションを識別し(912)、オフトラックイベント修正前に第2のデータオペレーションを行う(913)方法及び装置が示されている。示された方法及び装置によって、ハードディスクドライブにおける効率の向上がもたらされる。オフトラックエラーを修正するための別の試行のために、読み出し/書き込みヘッドが回転するのを待って通常無駄にされる時間が、別の手近なオペレーションを完了させるために用いられる。
(もっと読む)
サーボフレーム間隔補正装置、記憶装置、サーボフレーム間隔補正方法
【課題】従来の推定位置に補正を行うサーボフレーム間隔補正装置、記憶装置を提供する。
【解決手段】複数のサーボフレームが配置された記憶媒体30から第1サーボフレームを検出する検出部10と、所定のサーボフレームとその所定のサーボフレームの次に検出されるサーボフレームとの検出時間間隔を保持したサーボフレーム間隔テーブル20から、第1サーボフレームと第1サーボフレームの次に検出される第2サーボフレームとの検出時間間隔を取得する取得部11と、取得部11にて取得された検出時間間隔と、基準となる時間間隔との差分を算出する差分算出部12と、差分算出部12にて算出された差分に基づき、次に検出すべき第2サーボフレームの推定位置に対し補正する補正部13とを備えた。
(もっと読む)
ディスクドライブのウェッジ毎のWORF決定
【課題】新規且つ改善された、ディスクドライブのウェッジ毎のWORF決定方法。
【解決手段】サーボ情報の複数のウェッジを有するディスクの表面上にトラックを配置する方法は、第1のサーボウェッジについてのサーボ情報を復調すること(810)、及び第2のサーボウェッジについてのサーボ情報を復調する前に、第1のサーボウェッジについてのサーボ情報に対する反復可能な書き込みランアウトの補正因子を決定すること(812)を含む。機械読み取り可能なメディアは、上記方法を実行する命令を提供する。ディスクドライブは、上記方法を実行し、トランスデューサを所望のトラック上に配置するための信号を生成するプロセッサディスクを含む。
(もっと読む)
磁気ディスク装置
【課題】螺旋状のサーボ情報を使用して、同心円状のデータトラックに対するヘッドの位置決め制御を効率的に行なうことができる磁気ディスク装置を提供することにある。
【解決手段】螺旋状のサーボ情報が記録されたディスク媒体11を使用するディスクドライブにおいて、CPU19は、同心円状のデータトラックのセンタに相当する仮想トラックセンタを想定した場合の仮想サーボ情報を生成する。CPU19は、当該仮想サーボ情報を使用して、ヘッド12を同心円状のデータトラックのセンタに位置決めするための制御を実行する。
(もっと読む)
位置決め制御システムおよび位置決め制御方法
【課題】磁気ディスク装置において、高精度のヘッド位置決めを行う。
【解決手段】ディスクに対してヘッドを移動させ、ヘッドの位置を検出し、目標位置に対するヘッド位置の誤差を表す位置誤差信号を所定時間間隔で検出し、検出される位置誤差信号をディスク回転の1周期単位で記録し、非周期外乱を検出する外乱検出ステップと、第1の回転周期において検出された第1の位置誤差信号を、第1の位置誤差信号の1周期時間前に検出された第2の位置誤差信号に基づいて補正し、補正された第1の位置誤差信号から、ヘッドの規範位置指令を計算し、1の回転周期の1周期前の第2の回転周期において非周期外乱が検出され、かつ、第2の位置誤差信号が検出されたヘッド位置の検出時点が、非周期外乱の検出時点を基準として所定時間範囲に含まれるときは、第2の位置誤差信号の振幅を抑制し、振幅抑制した第2の位置誤差信号に基づき第1の位置信号誤差を補正する。
(もっと読む)
ビット・パターン化媒体用ヌルサーボパターン
【課題】ビット・パターン化媒体およびそのサーボセクタ・ヌルパターンを得る。
【解決手段】パターン化記録媒体はセグメントおよびその中に形成されたヌルパターンを含む。セグメントは非磁性材料により分離された個別磁気素子の第1および第2行、および第1および第2行間に配置された非磁性材料行を含む。ヌルパターンはセグメントの第1および第2行内の個別磁気素子の連続グループを含む。第1行内の各グループは第1行内の隣接グループの磁気極性とは反対の磁気極性を有する。第2行内の各グループは第2行内の隣接グループの磁気極性とは反対の磁気極性を有する。
(もっと読む)
記憶ディスク、サーボ情報書込み方法、ディスク装置及びディスク装置の製造方法
【課題】ディスク媒体の特性や、ヘッドの特性が異なっても、サーボ情報の読み取りエラーによる不良トラックの発生を抑制し、最適なサーボ情報で位置制御する。
【解決手段】書込みパラメータを変えて、書き込まれた同一フォーマットの複数種類のサーボ情報(12−1〜12−3)を備える記憶ディスク(10)を作成し、ディスク装置(30)に搭載した時、ヘッド(31)により、これらのサーボ情報(12−1〜12−3)の品質を測定した測定結果に基づいて、1のサーボ情報を選択して、使用する制御回路(36)を設けた。ディスク媒体の特性や、ヘッドの特性が変動しても、サーボ情報の読み取りエラーによる不良トラックの発生を抑制し、ディスク媒体の特性や、ヘッドの特性に応じた最適なサーボ情報を使用して、ヘッドの位置制御を行うことができる。
(もっと読む)
ディスク記憶装置及びディスク媒体
【課題】十分な表面の平坦化を実現したディスク媒体を使用し、かつサーボデータを確実に再生できるディスク記憶装置を提供することにある。
【解決手段】デイスクリート・トラック型のディスク媒体を有するディスクドライブ1において、ディスク媒体10上のサーボ領域には、一定幅以上の凸状領域の中央部に設けられた分断用空隙と、一定幅以上の空隙領域の中央部に凸状領域の非サーボデータ部が設けられた構造のディスク媒体10、及びサーボ領域からサーボデータを再生する再生信号処理回路を含むリード/ライトチャネル22を備えたディスクドライブである。
(もっと読む)
磁気ディスク、磁気ディスク装置、およびデータ記録方法
【課題】パターンドメディアにおいてデータの記録対象となるトラックにおけるリードおよびライト素子のディスク径方向の位置ずれ量のみならずディスク周方向の位置ずれ量をも把握する。
【解決手段】パターンドメディアとして構成された磁気ディスクであって、ディスク周方向に沿う第1基準線124上に配列された複数の第1サーボマーク121と、第1サーボマーク121のそれぞれに対応するディスク周方向位置において、第1基準線124に対し所定の間隔を隔てた第2基準線125を跨ぐようにディスク径方向に順次オフセットするようにして設けられた複数の第2サーボマーク122と、各第2サーボマーク122に対しディスク周方向に後続して設けられた複数の磁性領域123と、を備えて構成された磁気パターン領域12がディスク径方向位置の異なる少なくとも2箇所に設けられている。
(もっと読む)
サーボ書込み方法及びディスク記憶装置
【課題】マルチスパライルサーボパターンを有効に使用したセルフサーボ書込み動作を実現できるサーボ書込み方法を提供することにある。
【解決手段】ディスクドライブ20において、CPU27により、予め記録されたマルチスパイラルサーボパターンを使用して、ファイナルパターンをディスク媒体10上に記録するためのセルフサーボ書込み方法が開示されている。CPU27は、指定のスパイラルサーボパターンを使用して、ヘッド22をファイナルパターンを書き込むための目標位置に位置決めする位置決め処理と、指定のスパイラルサーボパターンに基づいて、ファイナルパターンに含まれるセクタアドレスデータを生成する生成処理とを実行する。
(もっと読む)
磁気記録媒体、それを採用するハードディスクドライブ及びハードディスクドライブのWRオフセット測定方法
【課題】磁気記録媒体、それを採用するハードディスクドライブ及びハードディスクドライブのWRオフセット測定方法を提供する。
【解決手段】ディスク基板と、ディスク基板の一面または両面に形成される磁気記録層と、を備え、磁気記録層は、パターンされた磁性体で形成されて複数のデータトラックをなす少なくとも一つのパターン領域と、連続的な磁性体で形成される少なくとも一つの連続領域と、を備え、連続領域は、記録ヘッドと再生ヘッドとの間のWRオフセットを測定するのに使われることを特徴とする磁気記録媒体である。これにより、従来のWRオフセット測定方法をあまり変化させずに磁気ヘッドのWRオフセットを補正できる。
(もっと読む)
ディスク記憶装置及びヘッド位置決め制御方法
【課題】データトラック幅を可変した場合でも、トラック密度の低下を招くことなく、十分な精度のヘッド位置決め動作を実現できるディスク記憶装置を提供することにある。
【解決手段】等間隔の同心円状のサーボトラックが構成されて、各サーボトラックの位置及びサーボトラック幅の範囲内を所定の最小オフセット量の単位で検出できる位置を示す位置情報を含むサーボデータが記録されているディスク媒体2を有するディスク記憶装置において、サーボトラックに基づいて、可変トラック幅のデータトラックに対してヘッド4を位置決め制御するコントローラ10を有する。
(もっと読む)
記憶装置及びその制御装置、ヘッド振動測定方法
【課題】周波数の高いヘッドの振動の測定を可能にする記憶装置及びその制御装置、ヘッド振動測定方法を提供する。
【解決手段】ヘッドの振動を測定することができる記憶装置であって、再生信号レベルの測定用波形を有するサーボ情報が所定の間隔で書き込まれ、少なくとも1つの所定のトラックである第1トラックに再生信号レベルの測定用波形である第1波形が書き込まれた記憶媒体から、ヘッドがサーボ情報を読み取るタイミングを示す複数の第1ゲート信号と第1ゲート信号間における少なくとも1つのタイミングを示す第2ゲート信号とを測定用ゲート信号として発生させるゲート発生部と、測定用ゲート信号のタイミングでヘッドにより再生される測定用波形の再生信号レベルの測定を行う測定部とを備えた。
(もっと読む)
ディスクリートトラックメディアの偏芯検出方法
【課題】DTMにおいて、サーボパターンを参照することなくトラックの、特に高次の偏芯量及び偏芯方向を検出できるトラック偏芯検出方法を得る。
【解決手段】DTMに対してヘッドを半径方向に段階的に移動させながら所定のデータを所定領域に書き込む段階と、上記磁気ヘッドを複数の振幅、位相による偏芯軌道で移動させながら上記所定領域に書き込んだデータを読み出して複数のエンベロープデータを取得し、上記取得した複数のエンベロープデータ波形の滑らかさを判定して次段階で偏芯検出が可能な1次偏芯追従軌道を探索する段階と、上記1次偏芯追従軌道に基づき1次偏芯に追従させた状態で上記磁気ヘッド位置を半径方向に段階的に移動させながら上記所定領域からデータを読み出して多相エンベロープデータを取得し、該取得した多相エンベロープデータから各セクターのトラック小数値を演算し、それらをセクター毎に順次接続して偏芯形状を再構成する段階とを含む。
(もっと読む)
ディスクドライブ装置,ディスクドライブシステム、及びコンピュータ可読媒体
【課題】安定した読み取り/書き込みを行うことができ、繰り返しランアウトをキャンセルするディスクドライブ装置、ディスクドライブシステム及びディスクドライブの駆動方法を提供する。
【解決手段】周期的な繰り返しランアウト信号をキャンセルするキャンセル信号を生成するため、インパルス応答を有する線形システムがキャンセル信号を受信して位置誤差信号を出力し、逆行列モジュールが位置誤差信号に逆行列を乗算して中間キャンセル信号を出力し、インパルス積分モジュールが、1つ以上の所定の期間における中間キャンセル信号の少なくとも1つのサンプルを積分し、キャンセル信号を出力する。
(もっと読む)
複数対の埋込みサーボバーストを使用したディスク駆動装置
【課題】アクチュエータアーム上の変換ヘッドのトラックへの位置決め精度を向上させるとともにトラックシークタイムを短縮する。
【解決手段】データトラック内の少なくとも1つの事前記録されたサーボセクタ20は、4つの時間的に互い違いとされたサーボバースト50を含む。サーボバーストの第1対および第2対は一般にバースト幅だけ互いに半径方向に偏倚され、これによりそのバースト対の各々の縁は実質的に同一線上にあってトラック空白を形成している。第1対はバースト幅の2分の1の幅だけ第2対から半径方向に偏倚している。第1対は第1相対振幅を決定するために読出され、第2対は第2相対振幅を決定するために読出される。事前記録されたサーボバースト50は、幅および数を変化され、それが位置されるデータトラック18に複数のトラック空白を形成するようになされる。
(もっと読む)
ヘッドの位置決め制御方法
【課題】
磁気ディスクの記録密度が向上してもリードヘッド及びライトヘッドの位置決めを確実にできるヘッドの位置決め制御方法を得る。
【解決手段】
メディアに記録されたトラッキングパターンをリードヘッド14aにより再生し、このヘッド14aにより得られる複数種類のバースト信号の出力を加算回路155〜162により加算したものを1つのバースト信号の出力信号とし、この出力信号に対し信号処理回路171により信号処理を行った信号により前記リードヘッド14aの位置決め制御を行う。
(もっと読む)
媒体記憶装置及び位置復調装置
【課題】位相サーボパターンを用いて、位置を復調する位置復調装置において、テーブルサイズを削減し、高精度の位置復調を実現。
【解決手段】記憶媒体(10)の位相サーボパターンの再生信号から第1のベクトル情報と第2のベクトル情報を復調するサーボ復調回路(30)と、第1、第2のベクトル情報から角度差のtan値を計算し、近似式で、トラック中心に位置ずれ量を計算する処理ユニット(40)と差分テーブル(64)とを有する。近似式と差分を使用したので、テーブルサイズを大幅に削減でき、且つ低速のプロセッサでも、高精度に位置復調が可能となる。このため、高精度の位置復調を、低価格の装置で実現できる。
(もっと読む)
101 - 120 / 287
[ Back to top ]