
Fターム[5D096GG06]の内容
トラック探索、整列のためのヘッド移動 (3,141) | 請求の範囲に記載された発明、考案の対象 (241) | 利得制御 (17)
Fターム[5D096GG06]に分類される特許
1 - 17 / 17
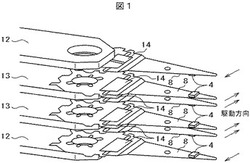
磁気ヘッド駆動装置およびそれを用いた磁気ディスク装置
【課題】
励起されるアームモードの数を一つにし、すべてのヘッドの励起されるアームモードの周波数応答を同位相にすることで、制御コントローラの位相ロスを減らし、制御系の安定を確保した高精度の位置決め精度を可能とする。
【解決手段】
マイクロアクチュエータ8とメインアクチュエータを搭載する磁気ヘッド4駆動装置において、両端アーム12のマイクロアクチュエータ8どうしは同方向に駆動し、中間アーム13のマイクロアクチュエータ8は前記両端アーム12のマイクロアクチュエータ8の駆動方向と反対方向に駆動する。
(もっと読む)
磁気ディスク装置のヘッド位置決め制御方法

【課題】位相特性を改善して制御系の安定性を維持する制御方法を提供すること。
【解決手段】フィードバック制御器31は、制御対象35である磁気ヘッドを磁気ディスク上の目標位置へ移動させるための制御操作量を決定する。また、共振抑圧フィルタ33によって、制御操作量の第1の周波数成分を抑制する。共振フィルタ34によって、制御操作量の第2の周波数成分を増大させる。抑制及び増大後の制御操作量に応じて、アクチュエータがヘッドを磁気ディスク上の目標位置へ移動させる。
(もっと読む)
外乱抑圧機能を持つ位置制御方法、位置制御装置および媒体記憶装置
【課題】外乱抑圧機能を持つ位置制御装置において、外乱抑圧制御を停止することなく、ループゲインの校正を行う。
【解決手段】外乱抑圧制御のため、ループ特性が変化するフィードバックコントローラ(20)と、外乱周波数に応じた目標ゲインを格納するテーブル(32)と、開ループゲインの校正を行うゲイン校正部(34)とを有する。フィードバックコントローラのループ特性の変化に応じて、テーブルの目標ゲインを用いて、ゲイン校正する。外乱抑圧制御を中断しないで、開ループゲインを校正でき、開ループゲインを外乱に影響されず、正確に校正でき、正確な位置制御が可能となる。
(もっと読む)
コントローラ特性変更装置、記憶装置、コントローラ特性変更方法、およびコントローラ特性変更プログラム
【課題】外部の要因によって引き起こされた外部振動の影響を減少させることを課題とする。
【解決手段】外部の要因によって引き起こされたヘッドにおける外部振動の有無を検出し、ヘッドの位置決めの精度を重視する位置決め重視用コントローラ特性でコントローラがヘッドの位置決めを制御している時に、ヘッドにおける外部振動が有ることが検出された場合に、位置決め重視用コントローラ特性を、低周波数帯域の振動の圧縮効果を向上させる振動圧縮用コントローラ特性に変更し、振動圧縮用コントローラ特性でコントローラがヘッドの位置決めを制御している時に、ヘッドにおける外部振動が無いことが検出された場合に、振動圧縮用コントローラ特性を、位置決め重視用コントローラ特性に変更する。
(もっと読む)
磁気ディスク装置
【課題】位置決め制御に対する筐体の固有振動の影響を軽減しつつ、他の周波数範囲における影響を低減し、位置決め制御の安定化を図ることのできる磁気ディスク装置を提供する。
【解決手段】磁気ヘッドの位置を制御する位置制御回路が、磁気ヘッドの読み出した位置情報に基づいて、磁気ヘッドの位置を制御する信号を生成し、予め定めた対象周波数における感度関数を所定の第1利得分だけ低下させ、当該対象周波数よりも低い周波数において感度関数の上昇を所定の第2利得分に抑制するマルチレートフィルタ回路を通じて当該信号を出力する磁気ディスク装置である。
(もっと読む)
ヘッド位置制御方法、ヘッド位置制御装置およびディスク装置
【課題】外乱抑圧機能を持つ外乱オブザーバ制御による位置決め制御装置において、外乱周波数を抑圧しても、制御特性の変更を防止する。
【解決手段】アクチュエータのモデルと外乱のモデルを含む外乱オブザーバ制御により、推定位置誤差に従い、アクチュエータの推定ゲイン(L1〜L2)と外乱の推定ゲイン(L4,L5)を用いて、アクチュエータ(1)の制御値を演算する際に、推定位置誤差e[k]に従って、外乱周波数を推定し、前記外乱周波数に対応したアクチュエータ(1)の推定ゲイン(L1,L2)と外乱の推定ゲイン(L4,L5)を変更する。外乱周波数に応じて適切なオブザーバ制御が実現できる。
(もっと読む)
ディスク装置制御方法及びディスク装置及び書き込み制御回路
【課題】本発明は磁気ヘッドに浮上量異常が発生した場合に書き込み動作を禁止するディスク装置制御方法及びディスク装置及び書き込み制御回路に関し、磁気ディスク上の全ての領域において磁気ヘッドの浮上異常を精度良くリアルタイムで検出することを課題とする。
【解決手段】ディスク装置の製造時において、磁気ヘッドの正常浮上時におけるサーボゲイン値である正常時サーボゲイン値を、予め磁気ディスクのサーボフレームに書き込み(ステップ10,11)、ディスク装置の使用時において、前記サーボフレームから得られるサーボゲイン値と、前記サーボフレームに記録されている正常時サーボゲイン値との差分を求め、この差分が一定値以上であるときは磁気ヘッドによる磁気ディスクへの書き込みを禁止する。
(もっと読む)
位置決め制御装置、ディスク装置、及び位置決め制御方法
【課題】偏心のあるディスクを用いて仮想円制御を行う場合でもシーク動作に時間をかけずに目標位置に位置決めすることのできるディスク装置、制御装置、位置決め制御方法を提供すること。
【解決手段】各ディスク面の回転中心を基準にした真円を描く仮想円軌道を夫々求める。そして、その仮想円軌道を平均化した平均化軌道を求める。各仮想円軌道から平均化軌道を減算した軌道が各ディスク面に対する位置軌道となる。この軌道を描くようにMCU30はアクチュエータ14を制御する。
(もっと読む)
記録媒体駆動装置並びにヘッド位置検出方法およびクロック信号生成方法
【課題】比較的に簡単な構造で高い精度のトラッキングサーボ制御を実現することができる記録媒体駆動装置およびヘッド位置決め方法を提供する。
【解決手段】分離トラック26は、隣接する第1および第2記録トラック25a、25bを隔てる。第1ヘッド38の出力は境界47との相対位置に応じて変化する。第2ヘッド39の出力は境界46との相対位置に応じて変化する。しかも、第1および第2ヘッドは異なる境界47、48上に配置される。第1および第2ヘッド38、39の出力は確実に変化する。出力の差は確実に変化する。こうした出力の差に基づき正確な位置情報は生成される。位置情報はトラッキングサーボ制御に利用されることができる。その結果、トラッキングサーボ制御は高い精度で実現されることができる。しかも記録媒体ではサーボセクタ領域の形成は省略される。記録媒体では比較的に簡単な構造が確立されることができる。
(もっと読む)
磁気ディスク装置
【課題】磁気ディスク装置において、制御帯域や主共振を超えた周波数及び開ループ位相特性が不安定となる周波数においても、制御系の安定性を損なうことなく位置決め精度を向上させること。
【解決手段】磁気ディスク装置は、与えられた目標位置信号24と際せされた位置信号20とに基づいて、磁気ヘッド及びアクチュエータを含む制御対象27を制御する制御部28と、を備える。そして、制御部28と制御対象27とを接続したときの開ループ伝達特性に制御対象の機構共振周波数以外の周波数に共振特性が存在し、かつ開ループ伝達特性のゲイン特性が0dBとなる周波数よりも共振特性の周波数の方が高い周波数であり、かつ共振特性の周波数で開ループ伝達特性のベクトル軌跡の座標を(Rop,Iop)としたときに、共振特性の周波数で開ループ伝達特性の位相がアークタンジェント((Rop+1)/Iop)となるように制御部を構成した。
(もっと読む)
磁気ディスク装置の制御方法およびディスク装置
【課題】加速度センサを搭載した磁気ディスク装置の制御方法およびディスク装置に関し、加速度センサを搭載したディスク装置の外乱の補償制御を好適に行うことができるディスク装置の制御方法およびディスク装置を提供することを目的とする。
【解決手段】本発明は一軸方向の振動を検出する2つの加速度センサを離間して搭載したディスク装置の制御方法であって、2つの加速度センサの出力の極性、及び、減算値もしくは加算値が所定の条件のときには外乱補償ゲインを調整し、ヘッドアクチュエータの制御量の外乱補償を行うことを特徴とする。
(もっと読む)
低周波外乱補償制御装置とそれを利用したディスクドライブ
【課題】ディスクドライブのサーボ制御装置に係り、特に、ディスクドライブに引き込まれる低周波外乱を効果的に補償するための装置を提供する。
【解決手段】ディスクドライブのサーボ制御装置において、ヘッドの動きを制御する制御入力及び位置エラー信号を入力して、所定の状態方程式を利用して位置予測誤差を算出する状態変数予測器、外乱と位置予測誤差との数学的な関係を利用して、位置予測誤差から外乱推定値を算出する推定フィルタ、及び制御入力から前記外乱推定値を減算する減算器を備えることを特徴とする低周波外乱補償制御装置である。
(もっと読む)
コイルを有する駆動源の駆動制御回路
【課題】ボイスコイルモータのようなコイルを有する駆動源を高精度に駆動制御することができる駆動制御用半導体集積回路を提供する。
【解決手段】コイル駆動回路121,122と、コイルに流れる電流を検出する電流検出回路123と、電流指令値をアナログ信号に変換するAD変換回路150と、電流検出回路123の出力とAD変換回路150の出力に基づいて駆動回路121,122を駆動制御するための信号を生成する電圧入力−電流出力型の増幅回路125とを備えた駆動制御回路120において、AD変換回路150に所定の電流指令値を与えて上記コイルの端子に所定の電圧を印加しかつコイルに電流が流れないようにした状態で、電流検出回路123の出力とAD変換回路150の出力に基づいて、電流検出回路123の出力のずれを判定し、電流検出回路123の電流値もしくは抵抗値を調整して制御系のオフセットをキャンセルする。
(もっと読む)
ヘッド位置制御用補正テーブル作成方法、ヘッド位置制御方法およびディスク装置
【課題】ディスクの回転に同期した成分をヘッド制御量から補正して、ヘッドを位置制御するヘッド位置制御方法において、補正後の回転同期成分が最小となる加算ゲインを理論的に得る。
【解決手段】位置信号中のディスク(4)の回転に同期した成分と前記ディスク(4)の回転に同期しない成分との大きさの比に基づいて調整されたゲインを用いる。補正後のRROを求める式を用いて補正後のRROを最小にするゲインを理論的に求めることができる。実験に頼らずとも、ゲインを決めることができ、また、補正後のRROがいくらになるのかを保証でき、製造時間や装置仕様を定めることができる。
(もっと読む)
ディスク・ドライブ、ヘッドの位置決め方法及びサーボ・システム
【課題】
サーボ・システムの不安定を引き起こすことなく、繰り返し誤差を補償する。
【解決手段】
HDD1は、サーボ・システムのフィード・バック経路にピーク・フィルタ234を備えている。ピーク・フィルタ234は、磁気ディスクの回転周波数及びその高周波成分に回転周波数及びその高周波成分とピークが一致するように設計されている。サーボ・システムに所定のピーク・フィルタを挿入することによって、トラックの真円からのずれなどに起因する繰り返し誤差(RRO:Repeatable Run Out)を補償することが可能となる。また、システムのナイキスト線図が所定の特性を満たすことによって、ピーク・フィルタによるサーボ・システムの不安定を引き起こすことなく、繰り返し誤差を補償することが可能となる。
(もっと読む)
反復的なランアウト補償方法,記録/再生装置,記録/再生方法,および記録媒体
【課題】 HDDに対して反復的なランアウト補償器の個数及びゲインを最適化させるための方法,記録媒体及び装置を提供する。
【解決手段】 記録/再生装置における反復的なランアウトを補償する方法において:
記録/再生装置に備えられる記録媒体の各ゾーンに対して,ゾーンに適用するPRO補償器の個数を変化させて,各々異なる個数のPRO補償器をゾーンに適用した状態でゾーンでの位置エラー信号のサイズを測定する過程と;測定されたサイズのうち,最小サイズの位置エラー信号に該当するRRO補償器の個数を,それぞれの相応するゾーンに対するRRO補償器の最適個数として決定する過程と;を含む,反復的なランアウト補償方法を提供する。
(もっと読む)
磁気ディスク装置
【課題】磁気ディスクのサーボ・データ領域を拡張することなく、繰り返し誤差の影響を抑制する。
【解決手段】サーボ制御装置100は、磁気ヘッド20が読み出した位置情報の、磁気ディスクの回転周波数程度の低い周波数成分に対し、この低い周波数成分を位置情報から除去するピーク・フィルタ102と、位置情報を繰り返し誤差補償用データyを用いて補正する手段105と、補正手段105の出力uに基づいて制御量を計算する位相補正回路101と、ピーク・フィルタ102の出力と位相補正回路101の出力を加算する回路103とを有し、位置情報の、磁気ディスクの回転周波数程度の低い周波数成分に対し、位置情報に基づいて磁気ヘッドの位置決め制御量を計算し、位置情報と繰り返し誤差補償用データに基づいて計算された制御量に加算し、磁気ヘッドの位置決めを制御する。
(もっと読む)
1 - 17 / 17
[ Back to top ]