
Fターム[5D096WW03]の内容
トラック探索、整列のためのヘッド移動 (3,141) | トラッキング情報の担体への書込、検査 (383) | トラッキング情報の書込 (346) | 記録再生装置自体による書込 (91)
Fターム[5D096WW03]に分類される特許
1 - 20 / 91
サーボ書込み方法
【課題】ハードディスクドライブ中のトラックスクイーズを防ぐシステム及び方法を提供すること。
【解決手段】実施形態によれば、プリアンブルフィールドはトラックスクイーズを減少する方法でハードディスクドライブに書かれる。そ理想位置からのプリアンブルステッチラインの低周波数の変動を除去するために、特定のデータトラックのプリアンブルフィールドは、ディスクの多数の回転の間に書かれる。多数の回転の間に1つのデータトラックのプリアンブルフィールドを書くことによって、および各回転の間に不連続なサーボウェッジにプリアンブルフィールドを書くことによって、その理想位置からのプリアンブルステッチラインの低周波数の変動は、低周波数トラックスクイーズを生じないプリアンブルステッチラインの高周波数の変動に変換される。
(もっと読む)
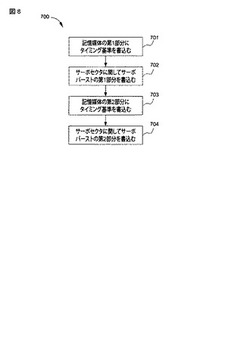
初期クロックパターン書き込み方法及び磁気ディスク装置

【課題】スピンドルモータの回転に高精度に同期したライトクロック信号に基づいてブランクディスクに初期クロックパターンを書き込むことができるようにする。
【解決手段】実施形態によれば、初期クロックパターン書き込み方法は、第1のタイミングマークを、発振器による発振周波数に応じた第1のクロック信号に基づいて、スピンドルモータによって回転させられるディスクの円周上の任意の箇所にヘッドを用いて書き込み、第1のタイミングマークがヘッドにより読み出される時間間隔を第1のタイムスタンプとして検出しながら、第1のタイムスタンプが目標とする第2のタイムスタンプに一致するように、発振器の発振周波数またはスピンドルモータの回転速度を調整し、この調整の後、初期クロックパターンを、調整された発振器の発振周波数またはスピンドルモータの回転速度に応じた第2のクロック信号に基づいてディスクに書き込む。
(もっと読む)
磁気ディスク装置及び同装置におけるマイクロアクチュエータ制御方法
【課題】ディスクの第1の面がトラッキング面として使用される場合に、ディスクの第2の面の位置誤差も低減できるようにする。
【解決手段】磁気ディスク装置は、ディスクと、第1及び第2のマイクロアクチュエータと、サーボコントローラとを具備する。ディスクは、第1及び第2の面を備える。第1及び第2のマイクロアクチュエータ15−1,15−2は、それぞれ、第1及び第2の面に対応付けられた第1及び第2のヘッドを微動させる。サーボコントローラ20は、第1の面がトラックキング面として使用される特定モードにおいて、第1のマイクロアクチュエータに与えられるべき第3の操作量が生成された場合、第3の操作量を第1の操作量として第1のマイクロアクチュエータに、第3の操作量の特定周波数の成分の極性が反転された操作量を第2の操作量として第2のマイクロアクチュエータに、それぞれ与える。
(もっと読む)
記憶装置および情報補正方法
【課題】スパイラル番号の信頼性を高める。
【解決手段】記憶装置は、ディスク、検出手段、計数手段、生成手段、算出手段、および補正手段を備える。計数手段は、トラック1周分の第1パターンの数まで、第1パターンが検出される数を計数する。生成手段は、第2パターンの検出に伴う割り込みが発生する毎にトラック1周分の第2パターンの数である最大パターン数までインクリメントした値を、検出手段により検出した第2パターンの番号として生成する。算出手段は、計数手段により数が計数されるまでの間に検出される第2パターンの数を計数した数に乗算した乗算値と、予め設定された初期位置に形成された第2パターンを基準にして、ディスクの半径方向に形成された第2パターンに定めた半径方向基準番号と、から理想番号を算出する。補正手段は、生成した番号と算出した理想番号とが一致しなかった場合、生成した番号を前記算出した理想番号で補正する。
(もっと読む)
記録装置
【課題】位置案内子が形成された基準面と、異なる深さ位置に形成された記録層とを有する光ディスク記録媒体に記録を行う場合、レンズシフト等に伴うスポット位置ずれで生じる記録マーク列の重なりやをATS(隣接トラックサーボ)で解決する際のサーボを安定化する。
【解決手段】基準面の位置案内子に基づき対物レンズを制御するトラッキングサーボループをマイナーループとして形成し、当該ループに対してATS制御系によるサーボ制御信号を与える構成とする。このとき、ATS制御系の位相補償については全積分や一次のLPFなどATSループの伝達特性ゲインにピークを発生させない構成を用い、またマイナーループの制御帯域はATSループの制御帯域より十分高く設定する。従来のATS単体とする場合に生じていたループ伝達特性ゲインのピークの発生を防止でき、トラッキング誤差の発散が防止されサーボの安定化が図られる。
(もっと読む)
磁気記録装置
【課題】異なる波形形状で再生されるサーボ領域内のデータを簡便に精度よく再生することを可能とする、垂直磁気記録方式の磁気記録媒体を具備する磁気記録装置を提供すること。
【解決手段】実施形態によれば、磁気記録装置は垂直磁気記録方式の磁気記録媒体を具備する。この磁気記録媒体は、第1の磁気パターンと第2の磁気パターンとを具備する。前記第1の磁気パターンは、ディスク面に対して水平に磁界を印加してサーボ領域内に記録され、磁気ヘッドの位置決めに使用される位置決めデータに対応する。前記第2の磁気パターンは、前記ディスク面に対して垂直に磁界を印加して前記サーボ領域内に記録され、前記位置決めデータを補正するために使用される位置補正データに対応し、該位置補正データが、前記位置決めデータを補正するために作成された元々の位置補正データを変調したものである。
(もっと読む)
ディスクドライブ支持機構、クランプ機構、およびディスクドライブキャリア
【課題】ディスクドライブを試験機ラックに開放可能に締め付けるための配置。
【解決手段】膨張式アクチュエータは、ディスク10ドライブ12をディスクドライブキャリア2を介してブロック8に締め付けるように作動する。ディスクドライブキャリア12は、ディスクドライブ12を基板に締め付けるためのクランプ機構である。ディスクドライブキャリア12は、異なる種類のディスクドライブ2と共に用いることができる。ディスクドライブ2は、ディスクドライブの下方または後方において、電気的および/またはデータ接続を設け、さらに関連する独自のプロダクトカードを備える。
(もっと読む)
パターンド磁気ディスクの平坦化に適合するサーボパターニングおよび書き込み
【課題】磁気ディスクの平坦化に適合するサーボパターニングを提供する。
【解決手段】ディスクドライブシステムは、磁性ランドおよび非磁性溝でパターン化された磁気ディスク110を含む。磁気ディスクは、直径内側部にブートストラップバンド310を含む。ブートストラップバンドの磁性ランドは様々なサイズを有し、サーボデータを表す。ブートストラップバンドの幅は、スライダの空気軸受面より狭い。スライダはブートストラップバンドからサーボデータを読み取って、データトラックへサーボデータを書き込む。
(もっと読む)
ハードディスクドライブのサーボパターン記録方法及びそれを用いて製造されるハードディスクドライブ
【課題】当該ハードディスクドライブ(HDD)の特性のみが含まれたレファレンスサーボパターンを生成し、かつ清浄室での工程時間を短縮できるサーボパターン記録方法を提供する。
【解決手段】データが記録されるディスクの半径方向に沿って全体トラックのうち、部分的に選択された当該トラックに記録された基礎サーボパターンを読み出してヘッドの移動速度を測定する段階と、該測定されたヘッドの移動速度と目標とするヘッドの目標移動速度との変動程度が既定の範囲以内である場合、当該フィードフォワード電流プロファイルを、レファレンスサーボパターンを形成するために印加しなければならないフィードフォワード電流プロファイルと決定する段階と、該決定されたフィードフォワード電流プロファイルを用いてレファレンスサーボパターンを記録する段階と、を含むことを特徴とする。
(もっと読む)
サーボウェッジ書き込み方法及び記録媒体
【課題】サーボスパイラルを書き込んでいる間ランダム要素によって引き起こされるサーボスパイラル変化の影響を少なくすること。
【解決手段】実施形態によれば、第1と第2のスパイラルセットが書き込まれた記録媒体にサーボウェッジを書き込む方法は、第1と第2のスパイラルセットの差に基づいて補正係数を決定し、記録媒体の第1の半径位置で、第1のスパイラルセットの中のスパイラルから復号された値に基づいて、サーボウェッジの要素を書き込み、記録媒体の第2の半径位置で、第2のスパイラルセットの中のスパイラルから復号された値に基づいて、サーボウェッジの要素を書き込む。この書き込みの前に第2のスパイラルセットの中のスパイラルから復号された値が補正係数で修正される。
(もっと読む)
ディスクへサーボ・ライト・トラックを書き込む方法及びディスク・ドライブ
【課題】ヘッドのサーボ制御を行いながらそのヘッドによりディスクにサーボ・データを書き込むセルフ・サーボ・ライトにおいて、伝播書き込みの繰り返しによるトラック形状誤差の累積を小さくする。
【解決手段】本発明の一実施形態のセルフ・サーボ・ライトは、サーボ・システムに補正信号を与えることで、サーボ・ライト・トラック形状の累積誤差を減らす。SSWは、サーボ制御の補正信号として正弦波を使用する。SSWは、トラック形状誤差における上記正弦波の成分の位相を測定し、その測定結果に従って、トラック形状の累積誤差を小さくする補正正弦波信号の位相φを決定する。これにより、シンプルな構成によってトラック形状誤差の累積を抑えることができる。
(もっと読む)
磁気ディスク装置の製造方法
【課題】筐体内の低密度気体の濃度を簡便に評価することが可能な磁気ディスク装置の製造方法を提供する。
【解決手段】本発明の磁気ディスク装置の製造方法では、ガス注入口11iから筐体10内に置換用の気体を注入し、ガス排出口11eから排出される気体をチャンバ57内に導入し、チャンバ57内に音を発生させ、チャンバ57内を伝わる音の音圧を検出し、当該音の音圧に基づいて筐体10内の置換用の気体の濃度を評価する。
(もっと読む)
ハードディスクドライブのサーボパターン記録方法
【課題】ハードディスクドライブのサーボパターン記録方法を提供する。
【解決手段】本発明のハードディスクドライブのサーボパターン記録方法は、多数のアンモナイトサイクルを有するマスタパターンを用いてハードディスクドライブのディスク上にレファレンスサーボパターンを記録させることによって、ハードディスクドライブのディスク上に、レファレンスサーボパターンの記録時間を短縮し、コストを低減し、かつユーザが所望するレファレンスサーボパターンを簡便に記録させることができる。
(もっと読む)
情報記憶装置及び情報記憶装置の調整装置、並びにサーボパターン形成方法
【課題】記録再生ヘッド12の位置制御精度を向上する。
【解決手段】磁気ディスク18上の拡張システム領域74に、第1のサーボパターン34及び第2のサーボパターン36を用いて第3のサーボパターン64を磁気ディスク18上に記録する際(記録する前後)の情報である位置決め情報の測定結果を保持させる。これにより、第3のサーボパターン64を記録した以降において、当該第3のサーボパターン64を用いた記録再生ヘッド12の位置制御を行う場合に、記録時データを参照したり解析したりすることができるので、記録再生ヘッド12の高精度な位置制御の実現に寄与することができる。
(もっと読む)
情報記憶装置及びサーボパターン記録方法
【課題】第3のサーボパターンのリライト形成を精度良く行う。
【解決手段】記録媒体に第1のサーボパターン(外周側)が存在する場合に、当該第1のサーボパターンを用いて記録再生ヘッドが読み書き可能な外周側の範囲を決定する処理を実行し(ステップS10、S11、S17、S18)、記録媒体の内周側に第1のサーボパターン(内周側)が存在する場合に、当該第1のサーボパターンを用いて内周側の記録再生ヘッドが読み書き可能な範囲を決定する(ステップS12)ので、第3のサーボパターンを記録する範囲を適切に設定できるので、第3のサーボパターンのリライト形成を精度良く行うことができる。
(もっと読む)
情報記憶装置、記録再生ヘッドの送りピッチの補正方法及びサーボパターン形成方法
【課題】記録再生ヘッドの送りピッチを適切に補正する。
【解決手段】記録面上における絶対位置情報を有する第1のサーボパターン34A,34Bから磁気ディスク18上の半径方向に関する所定距離を目標距離として設定し、設定された所定距離を目標距離として、記録面上における相対位置情報を有する第2のサーボパターン36を用いて記録再生ヘッド12を初期送りピッチにて移動し、目標距離と記録再生ヘッド12の実際の移動距離とに基づいて、初期送りピッチを補正する。
(もっと読む)
記録媒体及び情報記憶装置、並びに制御装置
【課題】記録再生ヘッドの高精度な位置決めを実現する。
【解決手段】第1のサーボパターン34、第2のサーボパターン36及びシステム領域62が、磁気ディスク18のディスク基板の内周部において、周方向に沿って配置されているので、第1のサーボパターン34と第2のサーボパターン36を用いて、磁気ディスクの内周端又は外周端の近傍から、第2のサーボパターン36上に第3のサーボパターン64a〜64cを記録することができる。この場合、第1のサーボパターンに連結した状態で第3のサーボパターンを記録しなくても良いので、外部STW設備のヘッドの軌道(例えば円弧軌道)と、記録再生ヘッド12の軌道(例えば円弧軌道)が異なる(円弧の半径が異なる)場合でも、第3のサーボパターンを高精度に記録することができ、ひいては、記録再生ヘッドの高精度な位置決めを実現することができる。
(もっと読む)
磁気記憶装置の試験装置、調整装置および製造方法
【課題】サーボトラックの書き込み方式の異なる磁気記憶装置を効率よく製造する。
【解決手段】装置判別部15により、磁気記憶装置がセルフSTWの実行が必要な装置でないと判別された場合には、第1の調整制御部11および試験制御部12の制御により、この磁気記憶装置にそれぞれ書き込み/読み出し試験のための調整動作および書き込み/読み出し試験を順に実行させる。また、磁気記憶装置がセルフSTWの実行が必要な装置であると判別された場合には、第2の調整制御部13およびセルフSTW制御部14の制御により、この磁気記憶装置にそれぞれセルフSTWのための調整動作およびセルフSTWを順に実行させた後、さらに、第1の調整制御部11および試験制御部12の制御により、この磁気記憶装置にそれぞれ書き込み/読み出し試験のための調整動作および書き込み/読み出し試験を順に実行させる。
(もっと読む)
ハードディスクドライブの製造方法及び製造システム
【課題】ハードディスクドライブ(HDD)のサーボトラック形成工程において、基準磁気ヘッドによるセルフサーボライトプロセスを用いた場合に生じる、磁気ヘッドの磁気特性ばらつきに起因した書き上がりサーボトラック数のばらつきによりHDDの品質・製造歩留りが低下する。
【解決手段】書き上りサーボトラックの間隔と、書込み時の制御目標値であるサーボパターンのオーバラップ量と、磁気ヘッドの特性値から、重回帰分析等のモデル化手法を用いて、書き上がりサーボトラック数を予測する制御式を作成する制御式演算部811を有するモデル演算部810と、前記制御式から目標トラック数を得るセルフサーボライトの制御値である磁気ヘッドのオーバラップ量を決定するオーバラップ量演算部829を有する書込み制御データベース817とを有し、書き上がりサーボトラック数を高精度に制御する。
(もっと読む)
磁気記録装置のサーボライト方法およびサーボライトシステム
【課題】磁気記録装置を製造する際のセルフサーボライト工程の歩留り、および、製品試験工程の歩留りを向上させる。
【解決手段】データベースと接続するための外部インタフェース105、システム全体を制御するMPU106、一時的にデータを保持するためのメモリ107、リード信号とライト信号を送受信するリードライトチャネル108、スピンドルモーター211やVCM204を制御するモータドライバ制御ユニット109からなるセルフサーボライト装置100と歩留りデータベース101、シリアルナンバーリーダー104からなるサーボライトシステムを用いて、磁気記録装置毎に、組み込まれた各磁気ヘッドを位置制御用ヘッドにした場合の歩留りを予測し、予測された歩留りが最大となる磁気ヘッドで位置を制御し、セルフサーボライトを実施する。これによって、磁気記録装置の生産性を向上出来る。
(もっと読む)
1 - 20 / 91
[ Back to top ]