
Fターム[5F031CA00]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 処理の対象物 (12,583)
Fターム[5F031CA00]の下位に属するFターム
円形基板 (7,645)
矩形基板 (3,196)
マスク,レティクル (724)
可撓性基板,フィルム (101)
ダミー,モニタ用のウエハ等 (140)
チップ,ペレット,ダイ (582)
リードフレーム (15)
モールド・封止後の完成品 (43)
その他の対象物 (127)
Fターム[5F031CA00]に分類される特許
1 - 10 / 10
搬送ロボット及び真空装置
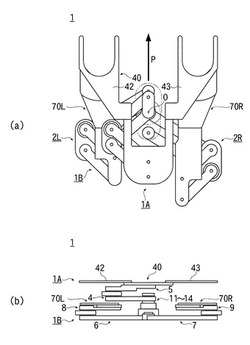
【課題】複数の搬送機構を有する搬送ロボットにおいて、スループットを向上させるとともに、搬送ロボット及びこれを配置する真空装置の高さを低く抑える技術を提供する。
【解決手段】回転軸Oを中心として同心状に配置され水平面内でそれぞれ独立して回転可能に設けられた第1〜3の駆動軸11〜13と、第1の駆動軸11によって駆動されて伸縮する上側搬送機構1Aと、上側搬送機構1Aに対して下方に配置されるとともに、第2の駆動軸12によって駆動されて伸縮する左下側搬送機構2Lと、上側搬送機構1Aに対して下方で左下側搬送機構2Lと同じ高さ位置に配置されるとともに、第3の駆動軸13によって駆動されて伸縮する右下側搬送機構2Rとを備える。左下側搬送機構2Lと、右下側搬送機構2Rとが、第1〜第3の駆動軸11〜13を挟んで基板搬送方向Pの両側に配置されている。
(もっと読む)
リニアモータ,可動ステージおよび電子顕微鏡

【課題】漏洩磁場の抑制と駆動性能とのバランスを取る。
【解決手段】開放面を有する第1のヨーク18と、前記第1のヨーク内にS極とN極とが交互になるよう直線状に並べられた2列の永久磁石17とを備えた界磁子9と、前記2列の永久磁石の間に設けられ直線移動する可動子10とを備えたリニアモータにおいて、前記第1のヨークの開放面から見て前記第1のヨークの開放端部と前記永久磁石とを覆うように、前記第1のヨークの開放端部に第2のヨーク19を接続する。
(もっと読む)
搬送機構、及び、それを備えた真空処理装置
【課題】ラック・アンド・ピニオンの技術を用いた縦型搬送によるインライン型の真空処理装置であって、ピニオンギヤとラックギヤが同期ずれにより、トレイに振動や衝撃を与えることなく搬送を可能にする搬送機構、及び、それを備えた真空処理装置を提供することを目的とする。
【解決手段】複数のピニオンギヤのうち、少なくとも2つが回転してラックギヤに順次噛合することにより、該ラックギヤを現工程の処理室内に配置されるピニオンギヤから、次工程の処理室内に配置されるピニオンギヤへと受け渡して、トレイを搬送するラック・アンド・ピニオン機構、及び、それを備えた真空処理装置であって、各処理室を仕切るゲートバルブを挟んだ2つのピニオンギヤを同時に上下移動させる上下駆動部を有していることを特徴とする。
(もっと読む)
保持具
【課題】 様々な大きさのワークに適応可能な保持具を、低コストで提供することである。
【解決手段】 ベルヌーイの原理を利用して本体に設けた保持面1aにワークWを保持する保持具を前提とし、上記保持面1aの外形より突出する風よけ部材8を備え、この風よけ部材8の全部あるいは一部が、保持面1aに保持されたワークWと対向する位置関係を保つ構成にし、ワークWを保持搬送する際に、ワークWが脱落する方向x2の風圧を風よけ部材8がさえぎるようにした。
(もっと読む)
非接触保持装置
【課題】ワークを保持するために装置が必要とする空間を、保持面が移動する方向において縮小する非接触搬送装置を提供する。
【解決手段】非接触搬送装置10は、ワークWを保持する保持部材12と保持部材12が装着される装着プレート11とを有している。保持部材12は、ワークWに臨む流出面12aと、流出面12aに開口する旋回室と、旋回室に圧縮空気を導入する導入孔とを有している。一方、装着プレート11は、相対向する装着面15aと裏面15bとを繋ぐ外側面15cを有するプレート本体15と、気体供給源13からの圧縮空気が流れる気体流路と、気体流路の経路上に設けられ装着面15aに開口し、該気体流路と保持部材12の導入孔とが連通するかたちに保持部材12が嵌入される嵌入孔とを有している。装着プレート11の気体流路には、プレート本体15の外側面15cに設けられた供給ポート19を介して圧縮空気が供給される。
(もっと読む)
搬送振動監視装置及び真空処理装置並びに搬送振動監視方法
【課題】従来よりも高精度且つ迅速に基板搬送機構のベアリング間の段差を調整することで、装置稼働率、製品歩留まりの向上及びメンテナンスコストの低減を図ることができるインライン式成膜装置の搬送振動監視装置を提供する
【解決手段】本発明の搬送振動監視装置は、基板6を搭載してインライン式成膜装置S内に配設された搬送路Rに沿って搬送されるキャリアTに加わる振動を監視するものであって、キャリアTに取付けられた加速度変化を測定できる加速度センサ5と、加速度センサ5で測定された加速度データと解析するPC13とを備えて構成されている。
(もっと読む)
吸着装置および吸着方法
【課題】吸着パッドに生じた摩耗や位置ずれを自動的に検知する吸着装置を提供する。
【解決手段】吸着パッド10の基準位置L0における吸着力F1を吸着センサ30が測定し、測定された吸着力F1が閾値THより小さいと判定部42が判定した場合には、駆動部20が吸着パッド10を昇降方向または交差方向に所定の変位量を変位させ、変位した位置(変位位置LD)における吸着パッド10の吸着力F2を吸着センサ30が測定するとともに、吸着力F2が閾値THより大きいと判定部42が判定した場合の変位量ΔLを取得する機能を有する制御部40を備える吸着装置100。
(もっと読む)
XYステージ装置
【課題】レーザー干渉計による位置測長部位がXY方向に運動するXYステージにおいて、レーザー干渉計の測長光路を十分に覆う測長光路筒機構を備えることで空気揺らぎによる測長誤差を低減できるXYステージ装置を提供する。
【解決手段】XY方向に移動するステージと、ステージの位置を測長するためのレーザー干渉計と、ステージとレーザー干渉計間の測長光路の少なくとも一部を覆い、測長光路のレーザー干渉計側に設けられ、レーザー干渉計に固定される固定筒と、測長光路の少なくとも一部を覆い、測長光路のステージ側に設けられ、ステージの移動と連動して運動する可動筒とを備える測長光路筒機構を有し、固定筒または可動筒の一方の端部が他方の端部に挿入されることを特徴とするXYステージ装置。
(もっと読む)
基板取り扱い技術
【解決手段】 基板取り扱い技術を開示する。一実施形態例によると、当該技術は、基板サポートとして実現されるとしてよい。当該基板サポートは、実装部分を備えるとしてよい。当該基板サポートはさらに、実装部分から延伸している壁を備えるとしてよい。尚、壁は、概して囲まれた領域を形成し、遠位端において接触面を有するとしてよい。 (もっと読む)
基板搬送教示方法および基板搬送装置
【課題】落とし込み型の基板保持部を用いながらも、高精度な基板搬送情報を自動生成できる基板搬送教示方法を提供する。
【解決手段】シャトル搬送機構のハンド19Aに対する主搬送ロボットのハンド13Aの適正位置を教示するオートティーチングのために、被検出側治具基板110およびセンサ側治具基板120が用いられる。被検出側治具基板110がハンド19Aに保持させられ、センサ側治具基板120がハンド13Aに保持させられる。ハンド13A,19Aは、いわゆる落とし込み型のハンドであり、基板との間にバックラッシュが生じている。オートティーチングの際は、シリンダ100,53Aのロッド101,54Aによってバックラッシュを解消した状態とする。ハンド13Aの適正位置を表す教示位置情報は、バックラッシュ分を補正して求められる。
(もっと読む)
1 - 10 / 10
[ Back to top ]