
Fターム[5F031GA15]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | 把持・挟持によるもの (669) | 端面を把持 (216)
Fターム[5F031GA15]に分類される特許
61 - 80 / 216
半導体基板の回転保持装置
【課題】有機金属気相成長法により反応炉内において半導体基板に気相状態で膜を形成する場合に、ガスホイール法を用いることなく半導体基板への高品質な膜の形成が可能であって、気相物質を供給した反応炉を開き人手による基板の出し入れを行う必要がないと共に、反応炉に供給される気相物質の供給効率を向上させることができる半導体基板の保持装置及び半導体基板の保持装置の搬送装置を提供する。
【解決手段】サセプタ12は回転駆動軸15に対して上下方向において着脱可能に固定されると共に、半導体基板が載置される複数の基板ホルダ14が配置される開口部13は、上記サセプタ12の厚さ方向において貫通して形成され、上記サセプタ12の下方には上記基板ホルダ15が上下方向において解除可能に係合して、上記サセプタ12の回転により基板ホルダ14が回転しうる係合部16が設けられている。
(もっと読む)
物体移動装置、物体処理装置、露光装置、物体検査装置及びデバイス製造方法

【課題】基板を所定の二次元平面に沿って高速、且つ高精度で案内する。
【解決手段】基板Pは、枠状に形成された軽量な基板保持枠60により吸着保持され、基板保持枠60は、リニアモータを含む駆動ユニット70により水平面に沿って駆動される。基板保持枠60の下方には、基板Pの下面にエアを噴出して、その基板Pが概ね水平となるように非接触浮上支持する複数のエア浮上ユニット50が配置されている。複数のエア浮上ユニット50は、基板保持枠60の移動範囲をカバーしているので、駆動ユニット70は、高速且つ高精度で基板保持枠60(基板P)を水平面に沿って案内できる。
(もっと読む)
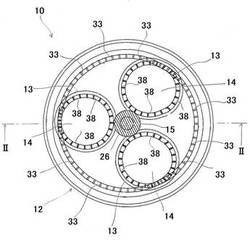
基板支持枠及び基板収納容器
【課題】基板の破損や汚染のおそれを低減し、輸送効率を向上させ、基板を容易に出し入れすることのできる基板支持枠及び基板収納容器を提供する。
【解決手段】ベース体10に中空の基板支持枠30を着脱自在に積層配置し、各基板支持枠30には、半導体ウェーハWを支持する複数の支持部32を間隔をおき配設した基板収納容器で、各支持部32を、基板支持枠30からその中空方向に指向する指向段差片35と、この指向段差片35に形成されて半導体ウェーハWを水平に支持する支持棚36と、指向段差片35を貫通した可撓性の抑え片40を基板支持枠30の中空方向に突出させ、かつ支持棚36の下方に徐々に接近するよう傾けて位置させる基板抑え38とから構成する。
(もっと読む)
基板移送装置
【課題】クランプ時に基板に無理な力が生じることにより発生する課題を解決する装置の提供。
【解決手段】大型ガラス基板等の基板0をその保持高さを精密に維持しつつ面内方向に自由に移動できるように案内する基板案内手段と、当該基板案内手段に保持された前記基板を面内の特定の方向に移動させるための基板駆動手段とを具備してなり、基板駆動手段が、大型ガラス基板等の基板を把持するための複数のクランプ部と、これらのクランプ部を同期させて駆動することにより、基板を基板案内手段に保持させつつ、特定方向に移動させ位置決めを行う基板駆動部とを具備してなる基板移送装置4において、クランプ部21により基板0をクランプした際に、その基板0に無理な力が作用しないように、クランプ部21を基板0の面外方向に逃がすための逃がし機構59をさらに備える。
(もっと読む)
ウェーハ搬送装置及びウェーハ搬送方法
【課題】本発明の目的は、ウェーハ収納用カセット内に載置されているウェーハの載置位置がずれている場合であっても、容易に、ウェーハの位置を修正し、ウェーハを保持・搬送できるウェーハ搬送装置及び方法を提供することにある。
【解決手段】ロボットハンド10が、ウェーハ下方の空間32内を水平移動可能でかつ、水平移動時に保持すべきウェーハ20の周縁部の高さ位置HWよりも大きな高さ寸法HYをもつウェーハ位置調整手段13とを有することを特徴とする。
(もっと読む)
基板の直列式処理のためのプロセスモジュール
本発明は、少なくとも1つのプロセスモジュールを備える、平坦な基板の流体直列式処理のための装置及び方法に関する。特に、本発明は、基板の緩やかで且つ制御された搬送中のこのような処理に関し、処理は、基板の搬送にも関することができる。本発明によれば、処理平面5に実質的に水平に配置されており且つ下側流体クッション6Aを形成するように設計された少なくとも1つの処理面7Aを有する処理チャンバ2を含むプロセスモジュール1が設けられており、同じ平面における基板22の線形送りのための入口3及び出口4の形式の2つの開口が、処理面7Aに割り当てられており、処理チャンバ2内の基板22の制御された送り9のための少なくとも1つのキャッチ10を備えた少なくとも1つの送り装置が設けられている。さらに、本発明は、本発明による装置を使用する方法を提供する。 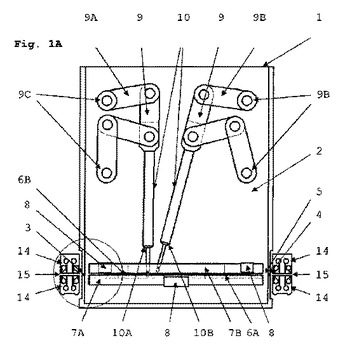 (もっと読む)
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】基板搬送に要する時間を短縮することができる基板処理装置及び半導体装置の製造方法を提供する。
【解決手段】ウエハ14は、先端側へ押し込む把持体126と先端側エッジグリップ110とで挟まれ固定される固定位置で保持される。ウエハ14がツイーザ56上にある移載工程において、ウエハ14は毎回同じ位置である固定位置に保持されるため、ツイーザ56上での位置ずれが矯正される。また、ツイーザ56上でウエハ14が挟まれるようにして保持されているため、ツイーザ56上のウエハ14の移動や落下等を防止でき、搬送動作速度を上げることが可能となる。
(もっと読む)
熱処理装置
【課題】基板上に形成された塗布膜を減圧雰囲気下で熱処理するにあたり、処理室内へのパージガスの供給量が少ない場合でも基板への昇華物の付着を抑制することができる熱処理装置を提供すること。
【解決手段】処理室21の天井の中央部に、基板載置台31と対向するように当該処理室21にパージガスを導入するためのガス供給ノズル51を設けて、処理室21の底部に当該処理室21内を減圧雰囲気とするための排気口64a、64bを設ける。また、処理室21の中央部にウエハWを水平に載置するための基板載置台31を設けると共に、この基板載置台31を加熱するヒータ33を設けて、前記基板載置台31の外縁から外方に突出し、当該基板載置台31の周方向に沿って形成されると共に処理室21の底面との間に空間を形成する整流部34を設ける。
(もっと読む)
物体搬送装置
【課題】物体を搬送する支持機構部のサイズを変更できる物体搬送装置において、支持機構部を軽量な構成とするものを提供する。
【解決手段】支持機構部100は、基板60を支持する支持部材として、固定フレーム10、可動フレーム20および可動フレーム30を備える。可動フレーム20および可動フレーム30は、それぞれ筋肉チューブ40および筋肉チューブ50を介して固定フレーム10に連結される。筋肉チューブ40および筋肉チューブ50の伸縮に応じ、可動フレーム20および可動フレーム30が固定フレーム10に対して摺動する。
(もっと読む)
ウエハ搬送方法およびウエハ搬送装置
【課題】 半導体ウエハが収容された状態で意図せず乾燥してしまうことを防止することが可能なウエハ搬送方法およびウエハ搬送装置を提供すること。
【解決手段】 コンベア1によって搬送されるウエハWfを収容カゴ3に収容する、ウエハ搬送方法であって、コンベア1によって鉛直方向と異なる方向に搬送されるウエハWfを、方向転換器2によってその面内方向が鉛直方向に沿い、かつ鉛直方向下方に進行するようにウエハWfの進行方向を転換した後に、ウエハWfを、液体Lq中に配置されかつ鉛直上方に開口する収容カゴ3に収容する。
(もっと読む)
半導体の製造装置と半導体基板のローディング及び/又はアンローディング方法
【課題】半導体基板の搭載のためにホルダーが装着されるバッチ型半導体の製造装置のボートにおいて、製造が簡単な半導体基板ホルダーの製造方法及びこのホルダーを通じてよりコンパクトな半導体基板のボート搭載を遂行してその生産性が向上するバッチ式ボートとそれを用いた半導体基板のローディング/アンローディング方法並びにこれらが含まれた半導体の製造装置を提供する。
【解決手段】半導体基板の底部が安着される外周と内周大きさを有するパイプ形状のホルダー基材10を成形し、ホルダー基材10を半導体基板のローディング用ボートで半導体基板の配置間隔に合わせてリング形状に切断してホルダーリング12を製作する。
(もっと読む)
基板昇降移送装置及び基板処理移送システム
【課題】基板昇降移送装置7の平面スペースを十分に削減して、工場のスペースの有効利用を図ること。
【解決手段】第1基板処理装置3の一側に第1姿勢切替用保持具37を備えた第1姿勢切替部材29が水平な軸心周りに揺動可能に設けられ、第2基板処理装置5の一側に第2姿勢切替用保持具49を備えた第2姿勢切替部材41が水平な軸心周りに揺動可能に設けられ、第1姿勢切替部材29の一側に立設した支持フレーム53に上下方向へ延びた無端状部材63が循環走行可能に設けられ、無端状部材63に複数の昇降用保持具69が周方向に間隔を置いて設けられたこと。
(もっと読む)
基板処理装置
【課題】複数枚の基板の一括搬送および1枚の基板の枚葉搬送の切り換えに要する時間を短縮することができる基板処理装置を提供すること。
【解決手段】基板処理装置は、バッチハンド24によりフープ保持部に保持されたフープに対して複数枚の基板Wを一括して搬入および搬出するバッチ式の第1搬出入機構4と、第1および第2枚葉ハンド45,46によりそれぞれバッチハンド24およびフープに対して1枚の基板Wを搬入および搬出する枚葉式の第2搬出入機構5とを含む。
(もっと読む)
基板搬送装置
【課題】構造を簡易にでき、占有面積を小さくできる枚葉式の基板搬送装置を提供すること。
【解決手段】枚葉式の基板搬送装置5は、第1枚葉ハンド45、第2枚葉ハンド46、第1進退機構、第2進退機構、一体移動機構、相対移動機構、および枚葉ハンド移動機構を備えている。第1進退機構は、第1水平方向D1に向かって第1枚葉ハンド45を進退させることができ、第2進退機構は、第1水平方向D1と正反対の第2水平方向D2に向かって第2枚葉ハンド46を進退させることができる。一体移動機構は、第1および第2枚葉ハンド45,46を鉛直方向に一体移動させることができ、相対移動機構は、第1および第2枚葉ハンド45,46を鉛直方向に相対移動させることができる。枚葉ハンド移動機構は、第1および第2枚葉ハンド45,46をX方向に一体移動させることができる。
(もっと読む)
基板把持ハンド、基板把持機構およびそれを備えた基板搬送装置、製造装置
【課題】基板を確実に把持し、基板を目的の位置に載置するときも基板保持部材との接触などの問題が無いハンド構成を提供すること
【解決手段】ベース部材21に対し、基準位置と把持位置との間をスライド可能であって、基板27を載置するスライド部材21と、スライド部材21を常に基準位置へ戻す方向に力を加える反力部材25と、スライド部材21を把持位置へ移動させるときにこれと接触し、スライド部材21が基準位置にあるときはこれと離れる駆動部29と、スライド部材21が基準位置にあるとき、基板27の周囲と一定の隙間33を有し、スライド部材21が把持位置にあるとき、基板27のエッジを保持可能なV字溝を有する第1の基板保持部材31と、スライド部材21が基準位置にあるとき、基板27の周囲と一定の隙間33を有するように駆動部29に配置され、スライド部材21が把持位置にあるとき、基板27のエッジを保持可能なV字溝を有する第2の基板保持部材30と、を備えた。
(もっと読む)
基板搬送用ロボット及びそれを備えた基板搬送装置、半導体製造装置
【課題】基板搬送用ロボットにおいて、基板を目的位置へ搬送する場合の搬送経路の選択肢を増やし、これにより搬送時間の最短経路を選択することを可能にさせる。
【解決手段】基板搬送用ロボットのコントローラが、複数の教示位置が教示された際、教示位置の各々に対するアクセス待機位置11を生成し、アクセス待機位置11から基板搬送用ロボットの最小旋回姿勢12までの複数の経路を生成して記憶する。
(もっと読む)
熱処理装置および熱処理方法
【課題】 対象物を雰囲気ガス環境下で熱処理する際に、対象物に損傷を生じることなく、熱処理後の対象物を短時間で冷却することが可能な技術を提供する。
【解決手段】 本発明は対象物を雰囲気ガス環境下で熱処理する熱処理装置として具現化される。その熱処理装置は、対象物と雰囲気ガスを収容する搬送容器と、搬送容器を加熱する加熱装置と、搬送容器を冷却する冷却装置を備えている。この熱処理装置では、加熱装置から冷却装置へ搬送容器を搬送する際に、搬送容器の内部に収容された対象物が搬送用の治具と接触することがない。従って、熱処理が施された直後の高温の対象物が常温の搬送用治具と接触して、対象物に熱ショックによる損傷が発生する事態を未然に防止することができる。
(もっと読む)
産業用ロボット
【課題】基板が搭載される複数の搭載部間のピッチを変えるピッチ変更機構を備えている場合であっても、小型化することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットを構成する基板搭載機構3は、上下方向に重なるように配置され基板が搭載される搭載部13〜17間のピッチを変えるピッチ変更機構26と、上下方向に移動可能な複数の可動ハンド18〜21とを備えている。ピッチ変更機構26は、Y方向を軸方向として配置される支点軸に回動可能に支持され可動ハンド18〜21が連結されるレバー部材52、53と、レバー部材52、53を回動させる駆動機構58とを備え、可動ハンド18〜21とレバー部材52、53との連結部となるハンド連結部は、レバー部材52、53に取り付けられY方向に突出する突出部材と、可動ハンド18〜21に取り付けられ突出部材が係合する係合溝が形成されるガイド部材とを備えている。
(もっと読む)
円盤状物把持装置並びに搬送機、移載装置及び搬送方法。
【課題】大型半導体ウエハをコンテナ内に撓みを防止してコンパクトに収納するために、複数のウエハを縦方向に搬入、搬出する円盤状物把持装置を提供する。
【解決手段】コンテナ内のウエハ8の中心を通る水平な線より上側に配置され、先端が厚み方向、且つ、ウエハ奥側の周縁に沿う方向に曲がった細長板状のエンドエフェクタ3と、エンドエフェクタ先端の曲がり側の厚み部に備えウエハの周縁部を把持する奥側パッド4と、奥側パッドがウエハ周縁に接触する位置とウエハ中心とを通る直線の下側にあって、ウエハに接触して周縁部を把持する下部手前側パッド6と、その直線の上側にあって、ウエハに接触して周縁部を把持する上部手前側パッド5とを有し、前記各パッドはウエハ周縁と接触する部分に凹部を有し、前記各パッドの少なくとも1つが動作してウエハを周縁部で把持する装置を提供する。
(もっと読む)
位置測定装置、成膜方法並びに成膜プログラム及び成膜装置
【課題】一方向からの測定によって対象物の位置情報を精度よく取得することを課題とする。
【解決手段】成膜装置1000が有する位置測定装置1100は、基板400が有する測定対象平面400a上の3つの測定点400a1、400a2、400a3に対し、測定点までの水平方向の距離をそれぞれ測定する測距部を備える。測距部は、3つの変位センサ1110、1120、1130を有する。これらの変位センサ1110、1120、1130は、垂直仮想平面600に正対するように配置される。位置測定装置1100は、水平方向から基板400の測定対象平面400aの投影画像を撮像する撮像部を備えている。撮像部は、画像センサ1150と、この画像センサ1150が接続された画像取得部1160を備えている。
(もっと読む)
61 - 80 / 216
[ Back to top ]