
Fターム[5F031GA15]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | 把持・挟持によるもの (669) | 端面を把持 (216)
Fターム[5F031GA15]に分類される特許
121 - 140 / 216
基板搬送機構及びそれを備えた基板処理装置

【課題】大幅なコスト増大を招来することなく、各処理工程毎に基板の欠損の有無の検査及び/又は基板の受け渡し完了の確認を行うことのできる機構及びそれを備えた基板処理装置を提供する。
【解決手段】前段の工程から基板を受け取って搬送し、後段の工程へと引き渡す基板搬送機構において、矩形基板80の対向する2辺を保持する一対の支持アーム61,62を備えた基板支持手段と、前記基板支持手段を移動させる移動手段65〜68と、前記支持アーム61,62の先端に設けられ、基板80を検出して信号を発生するセンサ70a,bと、前記基板80の受け取り又は引き渡しの際にセンサ70a,bの前を通過する基板80の辺縁部分について前記センサ70a,bから出力される信号に基づいて基板の欠損の有無及び/又は基板の受け渡しの完了を判定する判定手段とを設ける。
(もっと読む)
基板及びその搬送方法

【課題】ガラス基板等の基板のエッジ部が欠けたり表面にゴミや汚れが付着することなく、基板を搬送したり反転させることが可能な基板及びその搬送方法を提供する。
【解決手段】所定の厚さを有する平板であって表裏面A1,B1を有する基板において、表面及び互いに対向する一方の側方面1aに対してそれぞれ傾斜して表面と一方の側方面とを連結する第1の傾斜部2aと、裏面及び一方の側方面に対してそれぞれ傾斜して裏面と一方の側方面とを連結する第2の傾斜部2bと、表面及び互いに対向する他方の側方面1bに対してそれぞれ傾斜して表面と他方の側方面とを連結する第3の傾斜部3aと、裏面及び他方の側方面に対してそれぞれ傾斜して裏面と他方の側方面とを連結する第4の傾斜部3bと、を有する基板1とし、これら第1〜第4の傾斜部に基板搬送手段11,12を当接させることによって、基板を挟持して保持する。
(もっと読む)
保管装置
【課題】被搬送物の安定な載置を確保しつつ装置全体の重量を抑制し、室内に気流がある場合にはその気流を妨げにくい。
【解決手段】棚ユニット120は、棒形状のフレーム部材121〜125から構成されている。フレーム部材121〜124は軌道92に平行に配置されており、互いに離隔している。フレーム部材121〜124の間には、棚ユニット120を鉛直方向に貫通する貫通領域120a〜120cが形成されている。フレーム部材121及び122の間は被搬送物の幅より小さく離隔しており、フレーム部材121及び122の上面に被搬送物が載置される。棚ユニット120を軌道92に固定する固定ユニット110も、一方向に長尺なフレーム部材111〜114で構成されており、固定ユニット110同士も離隔して配置されている。
(もっと読む)
アライメント装置、搬送装置及びシート貼付装置
【課題】板状部材の位置決めを行った効果を継続的に維持することのできるアライメント装置と、板状部材の位置を保ったまま搬送することのできる搬送装置と、これら各装置を用いたシート貼付装置を提供すること。
【解決手段】ベース部材20と、当該ベース部材20に着脱自在に支持される支持体21と、当該支持体21をベース部材20に位置決めする第1の位置決め手段22と、支持体21の載置面21Aに半導体ウエハWを位置決めする第2の位置決め手段24とを備えてアライメント装置11が構成されている。半導体ウエハWは、前記支持体21と共に搬送手段13により搬送可能とされ、当該支持体21は、テーブル部材12に第3の位置決め手段45を介して支持されるようになっている。テーブル部材12に支持された半導体ウエハWには貼付手段15を介して接着シートSが貼付される。
(もっと読む)
基板処理装置および基板処理方法
【課題】処理液の使用量を低減することができるとともに処理液の温度変動を抑制することができ、かつ、単純化された装置構成を有する基板処理装置を提供する。
【解決手段】基板処理装置10は、一つの基板Wを保持し保持した一つの基板を処理する処理ユニット60と、複数の基板Wを同時に収容可能な処理槽であって、基板を浸漬して処理するための処理液を循環供給されながら貯留する処理槽と、前記処理槽の基板収容可能数未満の数の基板を同時に搬送可能な搬送装置と、を備える。搬送装置は、少なくとも前記処理液が貯留された前記処理槽へ基板を搬送する。前記処理ユニットと前記処理槽との少なくともいずれか一つを用いて基板が処理される。
(もっと読む)
基板処理装置
【課題】並列的に基板の処理を行う枚葉装置において、デッドロックを発生させることなく、効率的な運用規制を実現する半導体基板処理装置を提供する。
【解決手段】基板が所定の搬送シーケンスに従って複数のチャンバ11a,11b…11nへ搬送されるとき、戻りブロック処理実行手段12は、それらの複数のチャンバ11a,11b…11nのうち少なくとも一つのチャンバに対して複数回に亘って搬送処理を行う戻りブロック処理を実行する。ここで、戻りブロック処理が実行されるときは、所定枚数判定手段13が、その戻りブロック処理が実行される範囲内にあるチャンバに搬入された基板が所定の枚数に達したか否かを判定する。そして、判定結果において基板が所定の枚数に達したとき、搬送制御手段14は、戻りブロック処理が実行された範囲内にあるチャンバへの基板の搬送を停止させ、基板の投入規制を行う。
(もっと読む)
ウェーハの整列冶具、ウェーハの整列装置およびウェーハ処理装置
【課題】カセットに収納された複数のウェーハに対し、簡単な構造でオリフラ合わせを正確に行うことができるウェーハの整列冶具、ウェーハの整列装置およびウェーハ処理装置を提供する。
【解決手段】複数のウェーハのオリエンテーションフラット側を同時に押圧すると共に、押圧面50を平坦に形成した整列プレート33と、整列プレート33を支持すると共に、整列プレート33の上下動をガイドする上下動ガイド機構と、上下動ガイド機構を介して、待機位置と整列位置との間で整列プレート33の進退動をガイドする進退動ガイド機構31と、整列プレート33を後退方向に付勢する付勢手段34と、進退動ガイド機構31を支持する機台30と、を備える。
(もっと読む)
基板処理装置
【課題】薬液処理時に発生する薬液蒸気が処理槽を有するシンク外へ飛散するのを効果的に抑えて高品質の基板処理を可能にした基板処理装置を提供すること。
【解決手段】上方が開口した有底の容器からなる処理槽2A〜2Dと、ウェーハWを把持する把持機構11と、把持機構が連結されてウェーハの処理槽内に貯留された処理液への浸漬及び処理槽内からの引き上げを行う昇降装置10と、昇降装置が連結されてウェーハを処理槽へ搬送する搬送装置7と、を備える基板処理装置1において、処理槽から蒸気が平常時よりも多量に発生上昇するときに処理槽の開口部を覆うことができる搬送装置に連結された飛散防止カバー8を備える。
(もっと読む)
ベルヌーイ・ワンド
【課題】半導体ウエハハンドリング装置を提供すること。
【解決手段】半導体ウエハを移送するためのベルヌーイ・ワンド(50)であり、そのワンド(50)は、ウエハの上方表面と下方表面との間に圧力差を生成するために、ウエハの上方表面に沿ってガスの流れを生成するように構成された、複数のガス出口(74、75)を有するヘッド部(54)を有する。圧力差は、ベルヌーイの原理を用い、略非接触状態にて、ワンドのヘッド部(54)の下方にてウエハを支持する持上げ力を生成する。ワンド(50)は、異なるセットのガス出口穴(74、75)に流れを提供するように構成された、独立して制御可能なガス流路(70、80)を有する。ガス出口穴(74、75)およびガス流路(70、80)はベルヌーイの原理を用い、ウエハを支持するように構成される。
(もっと読む)
ディスクのチャック機構およびディスクキャリア
【課題】
ディスクハンドリングロボットとの間でのディスクの受け渡しが容易で、搬送中のディスクを確実に保持することができるディスクのチャック機構およびディスクキャリアを提供することにある。
【解決手段】
この発明は、チャックアームを肘部分で曲がった一対のL字形のアームにより構成し、このアームのL字の胴の部分が足の部分より長く、足の部分に第1のローラを設けて、各第1のローラが上下に重なり合うようにL字形を向かい合わせて各アームを配置し、ロック機構には第2のローラを設け、この第2のローラの中心が第1のローラの回動方向において第1のローラの中心を越えた位置に配置しているので、搬送時には、第1のローラの回動を容易にロックできる。
(もっと読む)
ガラス板搬送装置
【課題】複雑なアライメント機構を用いずに搬送位置精度を高精度に維持し、ガラス板を清浄に維持しながら、水平コロコンベアでは得られない高速搬送、及び瞬時の停止を実現するガラス板搬送装置を提供する。
【解決手段】ガラス板9の下面側よりエアーを吹き付け、ガラス板9を浮上させる多孔質パッド11を配置した保持部位10と、その外側位置には搬送方向にガイド31及びレール32を配置した駆動部位30と、駆動部位30の一部表面上には駆動連結アーム23とアーム22及びハンド21を一体構造とした移動部位20とからなり、ガラス板9を保持部位10により浮上させて保持し、搬送軸センター3近傍に整列したガラス板9cをハンド21が補助的に板端面から挟み込むように把持し、ガラス板9cを駆動部位30により搬送方向に高速に移動、停止する駆動機能を装備した。
(もっと読む)
環状に配置されているワークピースストッカ
本発明は、製造設備においてワークピースを保管するための改善されたストッカに関する。ワークピースがロボット把持アセンブリの周囲に固定的に保管されている。3つの自由度を有するようにロボットハンドラが設計されている。ストッカには周端グリップロボット把持アセンブリが設けられており、このロボット把持アセンブリはワークピースにアクセスし、周端部からワークピースを取り出し、したがって密にワークピースを保管することができる。 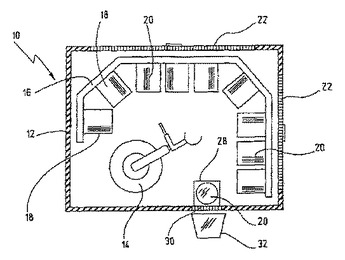 (もっと読む)
(もっと読む)
基板処理装置、基板処理方法、基板の製造方法及び電子機器
【課題】最小単位の装置のブロック構成化を図ることにより装置の配置構成に自由度を向上させ、装置構成上の問題を伴うことなく装置全体の小型化が向上し装置全体のフットプリントを小さくすること。
【解決手段】被処理基板Gに対して所定の処理を施す処理部を一方向に複数配置して構成された処理部配置部21〜23と、この処理部配置部内に設けられ前記被処理基板を搬送する第1の搬送機構と、この処理部配置部外かつ前記一方のほぼ延長線上に固定してまたは前記一方向のほぼ延長線上に対して直交する方向に固定してまたは/及び前記一方向の延長線上と平行する線上を移動自在に設けられ前記第1の搬送機構に対して直接或いは間接的に前記被処理基板を受け渡し自在に構成された第2の搬送機構11〜15と、を具備する。
(もっと読む)
基板の給排装置及び基板の給排方法
【課題】 省スペース化や装置の負荷増大防止を図ることができ、基板の撓みに伴う弊害を解消することのできる基板の給排装置及び基板の給排方法を提供する。
【解決手段】 基板収納容器1に対して半導体ウェーハWを投入・払い出し装置20により給排する装置であって、基板収納容器1を、ベース板2上に半導体ウェーハWを収納する収納カセット3を備えた容器本体4と、容器本体4のベース板2に嵌合されて収納カセット3を被覆する被覆ケース5とから構成する。また、投入・払い出し装置20を、基板収納容器1を立てて搭載して半導体ウェーハWを起立させるロードポート21と、ロードポート21に搭載された基板収納容器1に対して進退動し、被覆ケース5に対して容器本体4を着脱する着脱搬送機構27と、被覆ケース5から取り外された容器本体4の半導体ウェーハWを突き上げる突き上げ機構30と、突き上げられた半導体ウェーハWをハンドリングするハンドリングロボット31とから構成する。
(もっと読む)
ワーク保持機構
【課題】真空雰囲気の下で用いることができるとともに、軽量かつ簡素な構成とすることができ、搬送時におけるワークの横ずれを確実に防いで搬送速度向上にも寄与することができるワーク保持機構を提供する。
【解決手段】平板状のワークWを水平に保持するためのワーク保持機構は、ワークWが載せられるベース部材1と、ベース部材1の所定箇所に設けられた複数のガイド部材2とを備え、ガイド部材2は、ベース部材1に対して回転自在に支持される軸部20と、ベース部材1にワークWが載せられる際、このワークWの周縁部における下面一部に当接することにより、軸部20を支点として下方に押し下げられる当接部21と、当接部21が下方に押し下げられると、軸部20を支点として上方に押し上げられることにより、ワークWの周縁部における側面一部に対向した姿勢をとる規制部22とを有して構成されている。
(もっと読む)
半導体装置の製造方法
【課題】ハンドを用いた半導体ウエハを搬送する工程において、異物の発生を低減することのできる技術を提供する。
【解決手段】ロッド17はピストン16に固定されており、シリンダ15には第1空間18に接続されている第1圧力ライン19および第2空間20に接続されている第2圧力ライン21が設けられており、ピストン16には貫通穴22およびこの貫通穴22に嵌め込まれたネジ23が設けられている。第2圧力ライン21を閉じた状態で第1空間18を第1圧力ライン19から真空引きすることによって、ピストン16が移動して可動部13が可動し、第1圧力ライン19を閉じた状態で第2空間20へ第2圧力ライン21から空気を流入することによって、ピストン16が移動して可動部13が可動する。
(もっと読む)
基板収納カセット及び収納ケース
【課題】 基板を枚葉単位で取り扱うことができ、しかも、収納や搬送時には複数枚同時に取り扱うことのできる基板収納カセット及び収納ケースを提供する。
【解決手段】 口径450mmタイプの半導体ウェーハWの周縁部の一端から両側に亘る被収納領域Sに対向するベースプレート2と、ベースプレート2との間に半導体ウェーハWの周縁部の一端から両側に亘る被収納領域Sを隙間を介して挟持する保護プレート10と、ベースプレート2と保護プレート10とを接続し、半導体ウェーハWの周縁部の一端側を接触支持する支持ホルダ20と、ベースプレート2に設けられて半導体ウェーハWの周縁部の両側に対向し、半導体ウェーハWを複数の支持ホルダ20方向に案内する一対のスライドガイド30とを備える。
(もっと読む)
基板搬送システム
【課題】搬送の都度にジョイント機構の着脱を行うことを必要とせず、基板をスムーズに搬送する。
【解決手段】隣接して配置された2以上の搬送ステージ4A,4Bを備え、基板Aを水平状態に維持しつつ搬送する基板搬送システム1であって、搬送ステージ4A,4Bの少なくとも1つに、該搬送ステージ4Aの高さを調節するレベル調節機構7が備えられるとともに、該レベル調節機構7により搬送ステージ4Aを下降させた位置で該搬送ステージ4Aの下面を突き当てる突当部材8が設けられ、該突当部材8は、該突当部材8に下面を突き当てた状態の搬送ステージ4Aによる基板の搬送高さが、隣接する他の搬送ステージ4Bによる基板Aの搬送高さと略一致する位置に配置されている基板搬送システム1を提供する。
(もっと読む)
2つの基板ホルダを備えた基板移送装置
【課題】基板を移送する際の時間を短縮でき、かつ形状がコンパクトな基板移送装置を提供すること。
【解決手段】基板移送装置12は、可動アームアセンブリ18と、2つの基板ホルダ22、23と、同軸駆動軸アセンブリとを有する。可動アームアセンブリ18は、ほぼX字形の軸アセンブリを有する。基板ホルダ22、23は、X字形部材の異なる対のアーム部30、31、32、33に接続される。同軸駆動軸アセンブリは、伸張位置と収縮位置と間の反転一斉運動で、X基板ホルダ22、23のアームを動かす。
(もっと読む)
基板及びその搬送方法
【課題】基板のエッジ部が欠けたり表面にゴミや汚れが付着することなく、基板を搬送したり反転させることが可能な基板及びその搬送方法を提供する。
【解決手段】重心を通り端面を貫く直線が端面1a,1bと交わるそれぞれの部分に凹み部2をそれぞれ設けた基板1を搬送する際に、凹み部に挿入可能な爪部11を有する基板保持手段12を、凹み部と爪部とが向かい合うように凹み部それぞれに対応させて配置し、基板保持手段を移動させて爪部を凹み部にそれぞれ挿入し、爪部が凹み部にそれぞれ挿入された状態で基板保持手段をそれぞれ連携させて任意の方向に移動または反転させることにより、基板を任意の方向に移動または反転させる。
(もっと読む)
121 - 140 / 216
[ Back to top ]