
Fターム[5F031GA15]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 保持部 (5,617) | 把持・挟持によるもの (669) | 端面を把持 (216)
Fターム[5F031GA15]に分類される特許
161 - 180 / 216
半導体装置の位置決め反転装置

【課題】ダイシング、マウンティング、ボンディング、シーリングの各組立工程を経た半導体装置の反転及び位置矯正を、簡単な構成により、処理速度の短縮化と装置の省スペース化を実現した半導体装置の位置決め反転装置を提供する。
【解決手段】半導体装置の位置決め反転装置は、半導体装置Sを吸着保持する保持機構1と、半導体装置を受け取り受け渡すための搭載機構2と、半導体装置Sをガイドし矯正する4方向ガイド機構3と、4方向ガイド機構3に連結され、バネ32及び第2のベアリング43とからなるカム機構4により構成されている。4方向ガイド機構3は、半導体装置Sを四方から位置決めする機構であり、4方向爪31と、4方向爪31を閉状態に復帰させるバネ32とを備える。
(もっと読む)
基板処理装置

【課題】処理槽または処理室の内部と外部との間で基板を搬送しつつ基板を処理する基板処理装置において、処理槽または処理室内を良好に密閉できる技術を提供する。
【解決手段】基板処理装置1は、基板保持部34の上部に枠部33を有する。そして、基板Wをチャンバ20内に搬入したときには、枠部33を挟んでチャンバ20とカバー22とを閉鎖し、チャンバ20内を密閉する。また、基板Wをチャンバ20の上方に搬出したときには、チャンバ20とカバー22とを直接接触させて閉鎖し、チャンバ20内を密閉する。このため、基板Wをチャンバ20内に搬入したときにも、基板Wをチャンバ20の上方へ搬出したときにも、チャンバ20内を良好に密閉できる。
(もっと読む)
枚葉式ワーク把持装置
【課題】ワーク間の塵移転を防止することができ、カセットの任意の棚にもアクセスが可能なように薄くて、コンパクトな枚葉式ワーク把持装置を提供する。
【解決手段】円形の薄板状のワーク3をその外周で把持して枚葉搬送する枚葉式ワーク把持装置1が、一対の薄板状のブレード2、2と、これらのブレード2、2の各々に備えられた第1の把持部と第2の把持部とを切り替える切替手段とを有している。これら第1、第2の把持部は、いずれも、ブレード2の根元部と先端部とにそれぞれ回転可能に取り付けられた、ブレード2より突出する部分の高さがブレード2の厚さよりも短い支持部材(受け座)4上にそれぞれ設けられており、ワーク3を把持もしくは少なくとも支持するように作用する。
(もっと読む)
基板処理ユニット、基板搬送方法、基板洗浄処理ユニット及び基板めっき装置
ロボットアーム等の基板搬入機構を基板の搬入後速やかに基板の把持から解放し、基板を保持する時間を短縮し、スループットを向上させることができる基板処理ユニット、基板搬送方法、基板洗浄処理ユニットおよび基板めっき装置を提供する。基板11を所定の保持位置に保持する基板保持機構10と該基板保持機構で保持された基板に所定の処理を施す処理機構32を備えた基板処理ユニットにおいて、基板を保持位置近傍に案内するガイドピン15を具備する基板ガイド機構20を設け、基板保持機構は基板の保持位置外周上に複数のローラー14を備え、複数のローラーは保持位置近傍にある基板をその外周を挟持して保持するようになっており、ローラーは大径部と大径部の上部に小径部が一体に形成された構造であり、大径部の上部に基板搬送の際に基板を仮置きできる肩部を備え、肩部には外周に向かって下がる勾配の傾斜面が形成される。 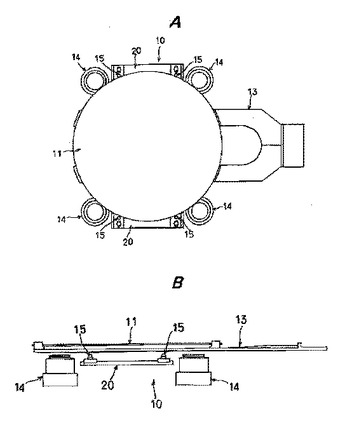 (もっと読む)
(もっと読む)
スタッカクレーン
【課題】 半導体製造用基板(ウエハ)を挿脱自在に収納した容器(FOUP)のストッカー内において、前記容器(FOUP)をスタッカクレーンにて所定の収納棚に対して搬入し、或いは所定の収納棚から搬出するロボットにて把持しつつ高速搬送するに当って、始動時及び制動時に受ける慣性力が増しても、容器(FOUP)内に収容されている基板(ウエハ)に伝わる振動を抑制し、当該基板(ウエハ)を保護すること。
【解決手段】 ストッカー内の棚群に面した2次元空間に沿って移動体9が走行し、容器(FOUP)8を所定の棚への搬入或いは所定の棚からの搬出するスタッカクレーンにおいて、前記移動体にはロボット7が備えられ、当該ロボット7のアーム機構7aが縮退形態になることに連動して係止部材15が容器(FOUP)8の所定個所を押圧し、伸長形態になることに連動して係止部材15と容器(FOUP)8とは平面視において離れるように構成した。
(もっと読む)
加工物移送装置
1つ以上の加工物、例えば、半導体ウエハを操作するための加工物移送アセンブリは、加工物の外径に対応する1つ以上の弓状部分を含む。この弓状部分は、加工物の外端に係合する加工物係合表面を有する;少なくとも1つの協働アームが、加工物の係合表面から加工物の外端部上に加わる圧力に応じて、加工物から離れる方向に加工物係合表面の変形を可能にするたわみアセンブリを含む。 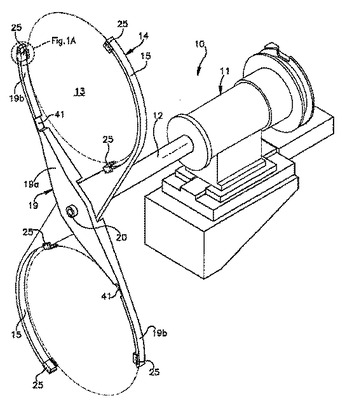 (もっと読む)
(もっと読む)
半導体基板用バキュ−ムチャックおよび半導体基板の搬送方法
【課題】極薄の半導体基板のエッジ把持型多関節搬送ロボットで搬送するに適した半導体基板のホルダ−を提供する。
【解決手段】基板ホルダ−はポ−ラスセラミック製円板状載置台31を非通気性材料製支持台32にポ−ラスセラミック製円板状載置台31の上面と非通気性材料製支持台32上面が面一となるよう載せ、この非通気性材料製支持台32を回転自在に軸承させるとともに、ポーラスセラミック製円板状載置台31下面にある非通気性材料製支持台32の環状空所32b、32cを減圧するバキューム手段を備える。ポ−ラスセラミック製円板状載置台31の外周壁面に接する非通気性材料製支持台32の環状側壁部の上面32aには、エッジ把持型搬送ロボットのア−ム10下面に取り付けられた積層体W、S、Gのエッジを把持する把持部材21,22が進入可能な径および深さを有する環状溝32dを設けた。
(もっと読む)
加工物支持構造体及びこれにアクセスするための装置
本発明は、底面及び周縁(P)を有する少なくとも1つの加工物(W)を格納するための加工物容器(12)に関する。1つの実施形態においては、加工物支持構造体(202)は、容器包囲体(12)の中に配置され、容器包囲体(12)の中に複数の垂直方向積重ね式格納棚を形成する。1つの実施形態においては、各格納棚は、加工物を実質的に水平方向の向きに支持するための第1タイン及び第2タイン(206)を含む。格納棚上に着座する加工物(W)の底面及び周縁(P)は、第1タイン及び第2タイン(206)の両方の外縁(207)を越えて延びる。本発明によるエンドエフェクタは、加工物(W)の延長部分又は「把持区域」と係合することができる。  (もっと読む)
(もっと読む)
半導体ウエハ移載装置、半導体ウエハ取出方法及び半導体ウエハ収容方法
【課題】半導体ウエハ移載装置の構造を簡易にしかつその製造コストを低減することができ、全ての半導体ウエハを短時間で効率良く容器から取り出しあるいは容器に収容できる半導体ウエハ移載装置、半導体ウエハ取出方法及び半導体ウエハ収容方法を提供する。
【解決手段】半導体ウエハWの一部がフープ32から露出してきたところで一対の支持部材14、16を挿入させることにより、複数枚の半導体ウエハWの全てを一度に一対の支持部材14、16で支持させることができ、フープ32から全ての半導体ウエハWを一度に取り出すことができる。一方、複数枚の半導体ウエハWの全てを一度に一対の支持部材14、16で支持させることにより、全ての半導体ウエハWを一度にフープ32に収容することができる。
(もっと読む)
半導体ウエハ移替装置
【課題】カセットとウエハガイドとの間でウエハを移し替える際におけるウエハの欠けや割れ、異物発生を未然に防止することができる半導体ウエハ移替装置を得ること。
【解決手段】ウエハ11を収容するカセット12を載置するカセット載置台20と、カセット載置台20に対向して配置され、カセット12内のウエハ11を保持するウエハガイド30と、ウエハ11を移動させる押上げクシバ41と、押上げクシバ41をカセット12とウエハガイド30との間で移動させるアクチュエータ43と、押上げクシバ41にかかる荷重を検出する荷重センサ44と、荷重センサ44によって検出された荷重が、ウエハ11に損傷を生じさせる所定値以上か否かを判定する荷重表示判定部45と、荷重表示判定部45によって押上げクシバ41にかかる荷重が所定値以上の場合にアクチュエータ43を停止させる制御部46と、を備える。
(もっと読む)
ウェハホルダ、ウェハ積層方法及び積層型半導体装置製造方法
【解決課題】 ウェハレベルで積層型半導体装置を製造する場合、積層すべきウェハどうしの位置あわせと、少なくとも加圧処理を伴った電極接合が行われる。この位置あわせ工程と電極接合接合工程を同一装置で行うと、加圧により位置あわせ装置の調整が変化し、精度の良い位置あわせが出来なくなってしまう。そこで、位置合わせと電極接合とを別の装置で行うことが必要となる。この時、積層すべきウェハ間の位置あわせ状態を保ったままで、ウェハ対を搬送することが求められている。
【解決手段】 ウェハをそれぞれのウェハホルダに保持し、ウェハホルダに取りつけられた接続部材によりウェハどうしの位置関係を固定する。この時、接続部材間に働く力によって接続部材自体がウェハ面内方向に変位しないようにする。そのために、実際には2枚の平行板バネを用いて結合部材をウェハホルダに取りつける。
(もっと読む)
ガラス板の移載装置および移載方法
【課題】ガラス板をエッジ部だけで非接触で移載する。
【解決手段】傾斜コンベア10上のガラス板Gの下辺を複数の搬送ロール12のV溝部で支持し、縦横両方向に垂設する自在ロール15により支持杆の各先端部に配設した自在ロール15いより凭れ掛けて支持する傾斜コンベア10と、傾斜コンベア10の前面側に位置する全方位に移動回転自在なロボット2のハンドからなり、ロボット2のハンド上に設けた横フレーム21上を走行自在な一対の挟持部材22にV溝付き挟持ロール24を配設してガラス板Gの左右を挟持し、ロボット2のハンドの下方側に設けた受部支持部材32に受部支持杆33の各先端にV溝部を有する受部ロール34を配設してガラス板Gを下端辺で支持し昇降自在な受部支持昇降手段30を昇降自在に配設した。
(もっと読む)
基板の処理システム
【課題】 複数のユニットを備えた基板の処理システムにおいて,多様な基板の処理レシピに柔軟に対応し,基板間の処理時間差や基板の搬送待ち時間を低減する。
【解決手段】 処理ステーション3の第1のブロックB1と第3のブロックB3には,複数の熱処理ユニットが積層される。第2のブロックB2には,複数の液処理ユニットが水平方向に配列される。第1と第3のブロックの熱処理ユニットには,第2のブロックB2の液処理ユニットにウェハWを搬送する搬送装置が設けられる。第1及び第3のブロックの熱処理ユニットは上下動自在であり,第2のブロックB2の液処理ユニットは水平方向に移動自在である。第1及び第3のブロックと第2のブロックB2との間でウェハWを搬送する際には,第1及び第3のブロックのユニットと第2のブロックB2のユニットが相対的に移動し,搬送装置によってウェハWが搬送される。
(もっと読む)
ウェーハの搬送装置
【課題】ウェーハアライメント専用装置やウェーハアライメント用のアクチュェータを使用せずに、フットプリントを最小に抑えて、低発塵でかつ、高スループットなアライメント機能を有するウェーハの搬送装置を提供する。
【解決手段】ウェーハを把持するウェーハ把持部41と、前記ウェーハ把持部41を支持するアーム部40と、機台1とを有し、前記機台1は、機台座10と、前記アーム部40を固定支持し、かつ前記機台座10に対して回転自在なる旋回基軸3とを有し、前記ウェーハ把持部41は、前記ウェーハのノッチやオリフラを含む基準位置を検知する位置検知センサ5を有し、前記ウェーハが載置されるウェーハ置台11を前記旋回基軸3が回転する回転軸心上に位置するように前記機台1に設けた。
(もっと読む)
基板搬送台車
【課題】 例えば、基板の向きを揃えて基板保管台車に収納する作業を、基板を作業者が手で持ち上げずに行うことを可能とする基板搬送台車を提供する。
【解決手段】 ガラス基板1を保持する保持部20と、保持部20よりガラス基板1を脱落防止させる挟持部とを備える。保持部20は軸支部により本体部10に対して軸支され、保持部20をスイングさせることによりガラス基板1の姿勢を水平状態と鉛直状態とに変換させることが可能である。ガラス基板1を水平状態に支持したままで該ガラス基板1をその板面方向において旋回可能とさせる旋回支持部71を備える。
(もっと読む)
基板搬送教示方法および基板搬送装置
【課題】落とし込み型の基板保持部を用いながらも、高精度な基板搬送情報を自動生成できる基板搬送教示方法を提供する。
【解決手段】シャトル搬送機構のハンド19Aに対する主搬送ロボットのハンド13Aの適正位置を教示するオートティーチングのために、被検出側治具基板110およびセンサ側治具基板120が用いられる。被検出側治具基板110がハンド19Aに保持させられ、センサ側治具基板120がハンド13Aに保持させられる。ハンド13A,19Aは、いわゆる落とし込み型のハンドであり、基板との間にバックラッシュが生じている。オートティーチングの際は、シリンダ100,53Aのロッド101,54Aによってバックラッシュを解消した状態とする。ハンド13Aの適正位置を表す教示位置情報は、バックラッシュ分を補正して求められる。
(もっと読む)
超音波洗浄装置
【課題】ウェハの洗浄面全域に効果的に超音波を照射して洗浄効果を高めることができる超音波洗浄装置を提供する。
【解決手段】洗浄槽21には洗浄液が満たされている。外槽23の外側には伝播水で満たされた伝播用水槽23がある。水槽23の底壁外面には、超音波発振板31が備えられている。複数枚のウェハ1は、上下移動可能なウェハチャック12により保持された状態で、洗浄槽21の底部に配設されたリフター式ウェハガイド11に保持される。ここで、ウェハチャック12は、ウェハ1の上端が洗浄槽21の洗浄液の液面から露出しない高さの位置でウェハ1を保持している。この状態で超音波発振板31から超音波を発振すると、ウェハ1の下部とウェハガイド11の水平部分との距離が離れているので、ウェハガイド11の影になる部分41とウェハ1とが重なる領域を最小限に抑えることができる。
(もっと読む)
基板角度位置補正装置
【課題】基板のノッチがフィンガによって把持されることを防止し、フィンガによる基板の持ち変え作業を不要にして基板の回転角度位置の補正作業を簡略化及び短時間化する。
【解決手段】基板搬入時にフィンガ11,12,13をセンサ31,32,33に対向しない位置に停止させ、搬入時に基板100のノッチがセンサ31,32,33によって検出された場合、検出信号に基づいて算出したノッチ101の回転角度位置から制御回転角度を測定し、フィンガ11,12,13に基板100を支持させる。搬入時に基板100のノッチがセンサ31,32,33によって検出されていない場合、フィンガ11,12,13をセンサ31,32,33の位置まで回転させた後フィンガ11,12,13に基板100を支持させてセンサ31,32,33がノッチ101を検出するまで回転させ、検出信号に基づいて算出したノッチ101の回転角度位置から制御回転角度を測定する。
(もっと読む)
基板保持装置
【課題】把持の際に基板の載置位置がずれることを防止し、基板に対する処理精度を向上させる。また、この載置位置のずれの防止及び処理精度の向上を図りつつ、複数の基板を同時に搬送して処理速度を向上させ、基板のエッジ部又はエッジ部の近傍を把持してパーティクル等による汚染を防止する基板保持装置の提供。
【解決手段】5枚のエンドエフェクタ21のそれぞれに配置され、往復移動して基板Pの端縁に当接、離間することで基板Pの端縁を把持する爪部21A〜21Cと、一端のそれぞれが爪部21A〜21Cに接続され、他端のそれぞれが支持部222A〜222Cに接続されたスチールテープ221A〜221Cと、支持部222A〜222Cを往復移動させる駆動シリンダ224A,224Cとを備え、駆動シリンダ224A,224Cを駆動してスチールテープ221A〜221Cを往復移動させることで爪部21A〜21Cを同期して往復移動させる。
(もっと読む)
薄膜形成装置
【課題】本発明は、表裏両面に所定の機能集積デバイスが形成される半導体、ガラス、金属、プラスチック等のウエハの加工工程で薄膜を形成する薄膜形成装置に関し、表裏両面に所定処理がなされるウエハ上への薄膜形成の均一化を図り、品質向上、歩留り向上を図ることを目的とする。
【解決手段】吸引固定回転部12の回転ステージ12A上に設けられる載置部13の周縁部分に所定数の突部載置部材15,16が形成され、当該突部載置部材15,16上に、搬送されるウエハをその周縁で載置させ、吸引固定した後に回転させて当該ウエハ上に供給ノズル17より薄膜形成材を供給させる構成とする。
(もっと読む)
161 - 180 / 216
[ Back to top ]