
Fターム[5F031GA46]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 動作 (3,504)
Fターム[5F031GA46]の下位に属するFターム
アームが回転 (1,258)
アームの支持部全体が水平方向に移動 (1,108)
アームの支持部全体が垂直方向に移動 (1,097)
Fターム[5F031GA46]に分類される特許
1 - 20 / 41
基板保持用枠体と基板保持用枠体の搬送方法
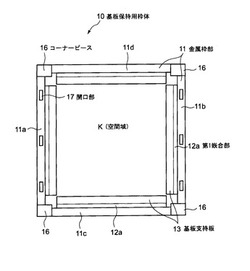
【課題】基板保持用枠体は、大型ガラス基板を載置し、複数枚を積層して搬送あるいは保管に用いられ、搬送時の衝撃や振動に対しての強度が求められると同時に発塵による基板への異物付着や傷による製品の品質不良の発生を防止することが求められる。2メートル角程度の大サイズ基板を安全に保管・輸送できる基板保持用枠体等を提供する。
【解決手段】少なくとも対向する2辺の金属枠部11のそれぞれの上面に、基板保持用枠体10を懸垂するための複数の開口部17を有する。
(もっと読む)
基板搬送装置

【課題】セラミックス等の脆性部材で構成された基板保持部材を備えた基板搬送装置において、破損した場合に破片の飛散を抑えること。
【解決手段】多関節アームの最上段の基板保持部材2の基体としてセラミックスからなるフォーク状の板状体を用いる。この板状体の周縁に沿って板状体の中に埋設した状態で延性部材である金属線5を配置する。また板状体の裏面側に延性部材である樹脂フィルムを貼着するようにしてもよい。このような構成では、基板保持部材が構造物に衝突し破損した場合にも、金属線によって破片を繋ぎ止めることで、破片の飛散防止あるいは抑制をすることができる。
(もっと読む)
基板載置装置および基板載置方法
【課題】空気の巻き込みによる基板の位置ずれを防止できる基板載置装置を提供する。
【解決手段】基板10を載置する基板載置装置100は、基板10を保持するステージ30と、ステージ30に設けられ、基板10を吸着する真空チャック31とを備える。真空チャック31は、ステージ30の表面30sに配列された吸着孔32を有しており、真空チャック31は、ステージ30の一端30aから他端30bに向けて基板10の吸着を実行する。
(もっと読む)
リソグラフィ・プロセス制御のための方法およびシステム
【課題】リソグラフィ・プロセスを評価し、かつ制御するための方法、システムを提供する。
【解決手段】リソグラフィ・プロセス(16)中にウェハ上に配置されたレジストの少なくとも1つの特性を測定する(22)ことを含むことができる。リソグラフィ・プロセスのクリティカルな測定基準には、それだけには限られないかもしれないが、リソグラフィ・プロセス(32)中に形成されたフィーチャのクリティカル寸法を含むことができる。本方法はまた、リソグラフィ・プロセスのステップを実行するように構成されたプロセス・モジュール(36)の少なくとも1つのパラメータを変更し、クリティカルな測定基準(46)のウェハ内変動を低減することを含むことができる。プロセス・モジュールのパラメータは、レジスト(16)の少なくともその1つの測定された特性に応答して変更することができる。
(もっと読む)
液中ウェーハ単離方法及び液中ウェーハ単離装置
【課題】極薄のウェーハを安全、簡単、確実かつ迅速に単離させることができ、かつ従来と比べて処理スピードが改善されたウェーハ単離方法及びウェーハ単離装置を提供する。
【解決手段】多数枚又は複数枚のウェーハが積層されたウェーハ積層体を液体中に浸漬させて準備するステップと、前記最上層のウェーハの一端部を吸着し、前記最上層のウェーハの他端部は吸着せずにおさえ、前記最上層のウェーハを水平方向で傾斜させる吸着ステップと、前記最上層のウェーハの下面と隣接する下側のウェーハの上面との間に流体を吹き込む流体吹き込みステップと、前記傾斜させた最上層のウェーハを、その傾斜の延長線上に沿って変位させて液中から前記最上層のウェーハを取出せしめるウェーハ変位ステップと、を含み、ウェーハを単離するようにした。
(もっと読む)
搬送装置のメンテナンス方法
【課題】本発明は、搬送装置のメンテナンス作業を効率よく行うことができる搬送装置のメンテナンス方法を提供する。
【解決手段】 マスクケース搬送装置(29)のメンテナンス方法は、CZ軸駆動部(26)によってケース保持部(23)を上下方向の第1位置に配置する工程(S102)と、最上段、最下段および中央段に設けられた複数のCZ軸駆動部26のカバー部材のうち第1位置に配置されたケース保持部と異なる高さに位置するカバー部材を取り外す第1取り外し作業を行う工程(S106)と、第1取り外し作業後に取り外されていない複数の前記カバー部材のうち第1位置に配置されたケース保持部と異なる高さに位置するカバー部材を取り外す第2取り外し作業を行う工程(S107)と、を含む。
(もっと読む)
基板の移載装置、およびその方法
【課題】ベルヌーイチャックで基板を吸引保持するときのハンド部の位置精度を緩やかなものとしながら、吸引保持した基板の位置決めを基板自身で自動的に行なって、非接触状態での基板の移載を高速度で能率よく行なえる移載装置を提供する。
【解決手段】パラレルメカニズムのハンド部に、基板を非接触状態で吸引保持するベルヌーイチャックと、基板を位置決めする複数個のガイド体とを設ける。基板を吸引する際には、吸引開始位置におけるベルヌーイチャックをハンド部で位置保持して、ガイド体が基板の外郭線の外に位置する状態にして基板を吸引保持する。吸引保持された基板を、ノズル穴から吹き出される空気流で一方向へ旋回させ、旋回変位する基板の辺部をガイド体で受け止めて位置決めする。以上により、基板を吸引保持するときのハンド部の位置精度を緩やかにできる。さらに、吸引保持した基板の位置決めを基板自身で自動的に行なえる。
(もっと読む)
基板搬送装置
【課題】構造を簡易にでき、占有面積を小さくできる枚葉式の基板搬送装置を提供すること。
【解決手段】枚葉式の基板搬送装置5は、第1枚葉ハンド45、第2枚葉ハンド46、第1進退機構、第2進退機構、一体移動機構、相対移動機構、および枚葉ハンド移動機構を備えている。第1進退機構は、第1水平方向D1に向かって第1枚葉ハンド45を進退させることができ、第2進退機構は、第1水平方向D1と正反対の第2水平方向D2に向かって第2枚葉ハンド46を進退させることができる。一体移動機構は、第1および第2枚葉ハンド45,46を鉛直方向に一体移動させることができ、相対移動機構は、第1および第2枚葉ハンド45,46を鉛直方向に相対移動させることができる。枚葉ハンド移動機構は、第1および第2枚葉ハンド45,46をX方向に一体移動させることができる。
(もっと読む)
基板搬送装置
【課題】装置の設置床面から低い位置で基板を搬送するとともに、装置全体を簡単な構造にすることができる基板搬送装置を提供することを課題とする。
【解決手段】基板搬送装置1であって、ハンド部材30と、上下スライド機構40と、横スライド機構50と、を備え、上下スライド機構40は、旋回ベース部材20に取り付けられた上下スライド用固定レール41と、上下スライド用固定レール41に取り付けられた横スライド用可動レール42と、を備え、横スライド機構50は、旋回ベース部材20に取り付けられた横スライド用固定レール51と、横スライド用固定レール51に取り付けられた上下スライド用可動レール52と、を備え、上下スライド機構40はハンド部材30に対して一方の側部に配設され、横スライド機構50はハンド部材30に対して他方の側部に配設されている。
(もっと読む)
基板搬送用ロボット及びそれを備えた基板搬送装置、半導体製造装置
【課題】基板搬送用ロボットにおいて、基板を目的位置へ搬送する場合の搬送経路の選択肢を増やし、これにより搬送時間の最短経路を選択することを可能にさせる。
【解決手段】基板搬送用ロボットのコントローラが、複数の教示位置が教示された際、教示位置の各々に対するアクセス待機位置11を生成し、アクセス待機位置11から基板搬送用ロボットの最小旋回姿勢12までの複数の経路を生成して記憶する。
(もっと読む)
熱処理装置および熱処理方法
【課題】 対象物を雰囲気ガス環境下で熱処理する際に、対象物に損傷を生じることなく、熱処理後の対象物を短時間で冷却することが可能な技術を提供する。
【解決手段】 本発明は対象物を雰囲気ガス環境下で熱処理する熱処理装置として具現化される。その熱処理装置は、対象物と雰囲気ガスを収容する搬送容器と、搬送容器を加熱する加熱装置と、搬送容器を冷却する冷却装置を備えている。この熱処理装置では、加熱装置から冷却装置へ搬送容器を搬送する際に、搬送容器の内部に収容された対象物が搬送用の治具と接触することがない。従って、熱処理が施された直後の高温の対象物が常温の搬送用治具と接触して、対象物に熱ショックによる損傷が発生する事態を未然に防止することができる。
(もっと読む)
ガラス基板梱包装置およびその梱包方法
【課題】ガラス基板とその保護シートの高速搬送を実現し、併せて、高精度で高品質の積載梱包を達成する。
【解決手段】ガラス基板梱包装置は、保護シート3上にガラス基板4が載置される載置ステーションと、保護シート3とガラス基板4とを交互に積載する積載ステーションと、保護シート3上に載置されたガラス基板4を保護シート3と共に保持し、積載ステーションに積載する積載手段としてのガラス基板積載装置とを備える。ここで、ガラス基板積載装置を構成するロボットアームは保護シート3およびガラス基板4を保持する保持部43を有し、この保持部43は、ガラス基板4を吸着する複数の吸着パッド45と、載置された状態のガラス基板4からはみ出た保護シート3の辺縁部分のうち互いに対向する2つの辺縁部3a,3bを挟持する挟持部46とを有する。
(もっと読む)
気相成長装置及び気相成長方法
【目的】シリコンウェハとホルダの貼り付きを防止することが可能な気相成長装置および方法を提供することを目的とする。
【構成】本発明の一態様のエピタキシャル成長装置100は、シリコンウェハ101を載置する円盤部材112と、円盤部材112表面にシリコンウェハ101を密着させた状態で、シリコンウェハ101が載置された円盤部材112を搬入し、シリコンウェハ101にシリコン(Si)含有膜を成膜するチャンバ120と、チャンバ120内で、シリコンウェハ101が載置された円盤部材112の裏面外周部を支持するホルダ110と、シリコンウェハ101を回転させる回転部材170と、を備えたことを特徴とする。本発明によれば、シリコンウェハとホルダとの貼り付きを防止することができる。
(もっと読む)
移載機のフォークストロークの補正方法
【課題】積み動作時と卸し動作時とでフォークのストロークを変えることにより、置台でのワークの位置ずれをなくし、置台側のガイドとの擦れによる発塵を防止するようにした移載機のフォークストロークの補正方法を提供すること。
【解決手段】ベース1からフォーク2を横方向に移動させるアーム3と、アーム3のベース1を昇降させる昇降装置4とを備え、積み動作時にワークWの積載によりフォーク2が傾斜状態から水平状態になる移載機のフォークストロークの補正方法において、フォーク2が傾斜状態から水平状態になることにより変位するフォーク2のずれ量ΔSを検出し、積み動作に続く卸し動作でずれ量ΔSだけフォークストロークを短くする。
(もっと読む)
真空処理方法及び真空搬送装置
【課題】許容値を越えた位置ずれに対しても適切に処置することができ、しかも、ウエハ異常およびセンサ異常にも適切に対応することが出来る半導体処理装置を提供する。
【解決手段】真空ロボット回転時のウエハの遮光角度を検出するθ軸センサ、及び、真空ロボット伸縮時のウエハの遮光距離を検出するR軸センサの出力に基づいて、ウエハの真空ロボットに対する位置補正量を求め、位置補正量が所定の規格値を外れていた場合に位置データの変更動作を行い、更に所定の許容値を外れていた場合は動作停止を行う。また、真空ロボットハンドとウエハの状態を確認し、問題なければリトライ動作にて位置データの変更動作を行う。また、距離データが所定の規格値を越えていた場合には位置ずれ警告として上位装置に警告を報告し、更に所定の許容値を越えた場合には位置ずれエラーとして動作停止を行う。
(もっと読む)
収容器搬送装置
【課題】収容棚に収容された収容器搬送するのに必要となる搬送時間を低減させたまま、複数の収容棚を完全に同期させて、収容器を搬送することができる収容器搬送装置を提供する。
【解決手段】棒状部材65を係合部材71で係合させ、エアシリンダ61で最上部の変位収容棚25aを移動させると、その棒状部材65が延出されたその他の変位収容棚25bが最上部の変位収容棚25aに連動して変位する。したがって、一つのエアシリンダ61の駆動でその他の変位収容棚25bを連動して変位させることができるので、複数の変位収容棚の移動を完全に同期させることができる。また、変位収容棚が変位して形成された空間を通して、搬送ロボットが固定棚列からFOUPをオープナーの載置棚へ搬送するので、FOUPを搬送するのに必要な搬送時間を低減させたまま、FOUPを搬送することができる。
(もっと読む)
ダイレクトドライブモータ及びスカラーロボット
【課題】磁極の固定に起因する雰囲気汚染を回避しながらも、ロボットに必要な剛性を確保でき且つ信頼性の高い,大気外の雰囲気中で用いられるダイレクトドライブモータ及びスカラーロボットを提供する。
【解決手段】直列的に連結された3段のブラシレスモータBM1において、ステータ29と、大気軸受装置33と、大気側回転子30と、角度検出器35,36と、モータ回転子21と、真空軸受装置19のうち少なくとも2つを、モータ軸線方向において互いに少なくとも一部が重合する位置に配置しているので、コンパクトな構成ながら、高い剛性を確保することができる。
(もっと読む)
半導体装置の製造方法
【課題】基板に付着している大気の成分を除去する。
【解決手段】ロードロック室に基板が搬入されると、ロードロック室の中は、まず排気され、その後パージガスが導入されて圧力が上昇する。そしてロードロック室は再び排気される。これにより、基板上に付着している大気の成分は除去される。その後、基板はロードロック室から処理室に搬送され、処理室の中で処理される。基板を処理する工程は、例えば大気に含まれる成分と反応するガスを用いて基板に膜を成膜する工程である。
(もっと読む)
基板処理装置
【課題】反転受渡部の数を最小限にしつつ、搬送ロボットの待機時間を極力低減することができる基板処理装置を提供する。
【解決手段】反転受渡部RVPASS2は、第3保持機構93および第4保持機構94を備える。第3保持機構93と第4保持機構94とは回転中心軸RXを挟んで上下対称位置に設けられており、回転中心軸RXの周りで180°回転して互いの位置が入れ替わる。搬入側の搬送ロボットは高さ位置H4にて第3保持機構93または第4保持機構94に基板を渡す。反転受渡部RVPASS2にて表裏反転された基板は、高さ位置H3にて第3保持機構93または第4保持機構94から搬出側の搬送ロボットによって受け取られる。搬入側の搬送ロボットは、先行する基板の反転処理が完了する前に、後続の基板の搬送を開始することができる。
(もっと読む)
プラズマCVD装置
【課題】プラズマCVD装置において、各処理室の処理タクトに影響を及ぼすことなく各処理室に付設する機構の個数を低減する。
【解決手段】プラズマCVD装置は、ロードロック室、成膜室、アンロード室の各処理室を備え、各処理室内に複数個の基板カートを収納可能とし、アンロード室は、基板カートを成膜室から搬入する搬入口と、基板カートを帰還路に搬出する搬出口と、複数の基板カートを保持するカート保持部と、基板カートを搬送するカート搬送機構と、搬入口および搬出口間で昇降するカート昇降機構とを備える。カート昇降機構は、基板カートを搬入口と搬出口との間で移動させ、アンロード室内外への複数個の基板カートの搬出入を可能とする。カート昇降機構は、基板カートの搬入口、搬出口への移動を、他の基板カートをアンロード室内に保持した状態のままで行い、他の基板カートの干渉によって動作が停滞するといった処理タクトへの影響を回避する。
(もっと読む)
1 - 20 / 41
[ Back to top ]