
Fターム[5F031GA47]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 動作 (3,504) | アームが回転 (1,258)
Fターム[5F031GA47]に分類される特許
1 - 20 / 1,258
接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体
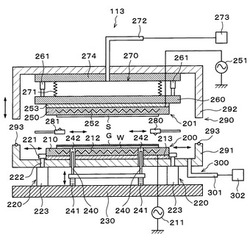
【課題】被処理基板と支持基板を適切に接合する。
【解決手段】接合装置の接合部113は、被処理ウェハWを保持する第1の保持部200と、第1の保持部200に対向配置され、支持ウェハSを保持する第2の保持部201と、第2の保持部201に保持された支持ウェハSを覆うように設けられた鉛直方向に伸縮自在の圧力容器271を備え、当該圧力容器271内に気体を流入出させることで第2の保持部201を第1の保持部200側に押圧する加圧機構270と、第1の保持部200、第2の保持部201及び圧力容器271を内部に収容し、内部を密閉可能な処理容器290と、処理容器290内の雰囲気を減圧する減圧機構300と、を有している。
(もっと読む)
真空処理装置及び真空処理装置の運転方法

【課題】半導体ウエハ等の試料の処理の歩留まりの低下を抑制する。
【解決手段】ロック室の後方に相互に連結され減圧された内部を前記ウエハが搬送される真空搬送室の容器の並びと、前記真空搬送室の容器の間に配置され前記ウエハが内部に載せられて収納される中間室と、前記真空搬送室の容器の各々の左右方向のいずれかの側の側壁に連結され内部で前記ウエハが処理される処理容器を含む複数の処理ユニットと、これらの処理ユニットを連結するバイパス路を構成するバイパス室とを備え、前記複数の真空搬送室の容器は、前記ロック室から前記複数の処理ユニットのいずれかに向けて搬送される前記ウエハまたは前記複数の処理ユニットの何れかで処理された後に前記バイパス室を通り別の処理ユニットで処理されて前記ロック室へ向けて搬送される前記ウエハのいずれかのみが搬送される。
(もっと読む)
紫外線照射装置及び基板処理装置
【課題】小型化及びコスト低減を実現した紫外線照射装置及び基板処理装置を提供する。
【解決手段】基板に対する紫外線照射を行う処理室と、少なくとも処理室内の基板を加熱する加熱機構と、処理室内を脱酸素及び脱水分状態に保持するように処理室内に気体を供給する気体供給部と、紫外線照射装置内に基板の搬入を行うための基板搬入口と処理室との間に少なくとも設けられ、処理室に連通されることで処理室内を所定雰囲気に維持する予備室と、を備えた紫外線照射装置に関する。
(もっと読む)
基板搬送システム
【課題】搬送アームのベース上方に設けた撮像装置だけで,搬送アームのピック上の基板を検出する。
【解決手段】搬送アーム210と共に旋回自在に支持され,ピック側に配置されるピック側ミラー310を備えたピック側ユニット304とベース側に配置されるベース側ミラー312を備えたベース側ユニット306とを少なくとも有し,ピック側ミラーはピックに保持されたウエハWの周縁を含む画像をベース側に向けて反射するように配置し,ベース側ミラーはピック側ミラーからの画像をベースの上側に向けて反射するように配置したミラーユニットと,ベース側ミラーからの画像が撮像領域に含まれるようにベースの上方に設けられた撮像装置130とを設け,撮像装置で取り込んだ当該画像に基づいて基板状態を検出する。
(もっと読む)
研削装置及び円形板状ワークの洗浄方法
【課題】研削装置のチャックテーブルに保持されていた円形板状ワークの被保持面側が保持部材によって保持されている場合において、被保持面のうち保持部材によって保持されている部分も洗浄できるようにする。
【解決手段】洗浄部材621に、搬出手段が保持した円形板状ワークの被保持面Tを接触させ、洗浄手段を構成する回転防止部材82を上昇させ被保持面Tに接触させて洗浄部材621の回転動作によって被保持面Tのうち回転防止部材82が接触している箇所以外の部分を洗浄し、その後、回転防止部材82を下降させて、被保持面Tのうち回転防止部材82が接触していた部分を露出させ、洗浄部材621を所定角度回転させることによって円形板状ワークが当該所定角度と同じ角度回転した後、再び回転防止部材82を上昇させ被保持面Tに接触させて洗浄部材621の回転動作によって被保持面Tの未洗浄部分を洗浄する。
(もっと読む)
産業用ロボット
【課題】温度の高い比較的大型の搬送対象物を搬送する場合であっても、熱の影響による軸受の摩耗や損傷を抑制すること、熱の影響によるアームの変形を抑制すること、および、ハンドの重量を軽減することが可能な産業用ロボットを提供する。
【解決手段】この産業用ロボットは、搬送対象物が搭載される搭載部27を有するハンド3と、その先端側でハンド3を保持するアームと、アームの基端側を保持する本体部と、搭載部27の少なくとも上面を覆うカバー部材30とを備えている。カバー部材30における輻射熱の反射率は、搭載部27における輻射熱の反射率よりも高く、カバー部材30の熱伝導率は、搭載部27の熱伝導率よりも低く、搭載部27の比重は、カバー部材30の比重よりも小さくなっている。
(もっと読む)
エネルギー線照射装置及びワーク搬送機構
【課題】エネルギー線照射システムにおいて、異なる寸法のワークに効率的にエネルギー線を照射できるコンパクトで低コストの搬送機構を実現する。
【解決手段】異なる寸法のワークW1、W2がそれぞれ搭載される第1、第2ワークホルダ31a、32aと、各々のワークホルダを各々のワーク授受領域とエネルギー線照射領域AR1との間で進退移動させる進退機構33と、互いに異なる位置に設けられた第1及び第2ワーク収容部21a、22aと、第1のワーク授受領域にある第1ワークホルダ31aと第1ワーク収容部21aとの間でワークW1を搬送する第1搬送アームと、第2のワーク授受領域にある第2ワークホルダ32aと第2ワーク収容部22aとの間でワークを搬送する第2搬送アームとを設けた。
(もっと読む)
基板処理システム、基板搬送方法、プログラム及びコンピュータ記憶媒体
【課題】露光前に基板の裏面洗浄を行う機能を備えた基板処理システムにおいて、基板処理の歩留まりを向上させる。
【解決手段】塗布現像処理システムのインターフェイスステーション5は、ウェハを露光装置に搬入する前に少なくともウェハの裏面を洗浄する洗浄ユニット100と、洗浄後のウェハの裏面について、当該ウェハの露光が可能かどうかを露光装置に搬入前に検査する検査ユニット101と、各ユニット100、101の間で基板を搬送するアームを備えたウェハ搬送機構120、130と、ウェハ搬送機構120、130の動作を制御するウェハ搬送制御部を有している。ウェハ搬送制御部は、検査の結果、ウェハの状態が洗浄ユニット100での再洗浄により露光可能な状態になると判定されれば、当該ウェハを洗浄ユニット100に再度搬送するように、ウェハ搬送機構120、130を制御する。
(もっと読む)
基板処理システム、基板搬送方法、プログラム及びコンピュータ記憶媒体
【課題】露光前に基板の裏面洗浄を行う機能を備えた基板処理システムにおいて、基板搬送の負荷を低減させる。
【解決手段】塗布現像処理システムのインターフェイスステーション5は、ウェハを露光装置に搬入する前に少なくともウェハの裏面を洗浄するウェハ洗浄部141と、洗浄後のウェハの裏面について、当該ウェハの露光が可能かどうかを露光装置に搬入前に検査するウェハ検査部142と、ウェハ洗浄部141とウェハ検査部142との間でウェハWを搬送する搬送手段143を有している。ウェハ洗浄部141、ウェハ検査部142及び搬送手段143は、筐体140の内部に設けられている。
(もっと読む)
基板処理システム、基板搬送方法、プログラム及びコンピュータ記憶媒体
【課題】露光前に基板の裏面洗浄を行う機能を備え、処理ユニットの構成を変更することなくフットプリントを小さくする、基板処理システムを提供する。
【解決手段】処理ステーションと、インターフェイスステーション5と、を備えた塗布現像処理システムにおいて、インターフェイスステーション5は、ウェハを露光装置に搬入する前にウェハの裏面を洗浄する洗浄ユニット100と、洗浄後のウェハが露光可能な状態かどうかを検査する検査ユニット101と、洗浄ユニット100と検査ユニット101との間でウェハを搬送するアームを備えたウェハ搬送機構120を有している。洗浄ユニット100と検査ユニット101は、インターフェイスステーション5の正面側に、上下方向に多段に設けられ、ウェハ搬送機構120は、洗浄ユニット100及び検査ユニット101に隣接した領域に設けられている。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板温度調節方法、及び表示用パネル基板の製造方法
【課題】複数の構成部材により構成される大型のチャックを用い、大型の基板の温度を均一に精度良く調節して、露光精度を向上させる。
【解決手段】チャック10にほぼ同じ大きさの複数の温度調節領域を設け、チャック10を温度調節領域と異なる形状の複数の構成部材10a,10b,10cにより構成する。チャック10の各温度調節領域に、熱媒体が流れる熱媒体通路11a,11b,11cをそれぞれ独立して設け、チャック10を構成する構成部材10a,10b,10cの境界に位置する温度調節領域の熱媒体通路11b,11cを、隣接する構成部材にまたがって配置する。チャック10の各温度調節領域の温度を別々の温度センサー12で検出し、各温度センサー12の検出結果に基づいてそれぞれ独立に温度を調節した熱媒体を、チャック10の各温度調節領域の熱媒体通路11a,11b,11cへそれぞれ独立して供給する。
(もっと読む)
板状被処理材の取扱装置
【課題】他の装置との非干渉領域を拡大して作業性と安全性を大幅に改善する板状被処理材の取扱装置を提供する。
【解決手段】水平走行本体HSに旋回ポストCPを装着し、旋回ポストCPに水平旋回アームCAを装着し、その先端に旋回首振可能に横断面がコ字型の竪フレームTFを連結装着し、竪フレームTFの下端部に長尺ボックスTBを傾動可能に装着する回動駆動連結機構XKを設け、長尺ボックスTBに板状被処理材Wの下端縁と上端縁を上下の挟持爪HTで挟持支持・開放する挟持爪機構KKを装着し、挟持爪機構KKは、長尺ボックスTB内に上下駆動機構を内装し、長尺ボックスTBの外側の縦長手方向に移動可能に左右一対の爪保持リングTRを設け、爪保持リングTRの前面に上下一対の挟持爪HTを装着し、爪保持リングTRの後部を長尺ボックスTBの後側からボックスTB内に挿入し挿入部をスクリューに連結してなる。
(もっと読む)
搬送ロボット及び真空装置
【課題】複数の搬送機構を有する搬送ロボットにおいて、スループットを向上させるとともに、搬送ロボット及びこれを配置する真空装置の高さを低く抑える技術を提供する。
【解決手段】回転軸Oを中心として同心状に配置され水平面内でそれぞれ独立して回転可能に設けられた第1〜3の駆動軸11〜13と、第1の駆動軸11によって駆動されて伸縮する上側搬送機構1Aと、上側搬送機構1Aに対して下方に配置されるとともに、第2の駆動軸12によって駆動されて伸縮する左下側搬送機構2Lと、上側搬送機構1Aに対して下方で左下側搬送機構2Lと同じ高さ位置に配置されるとともに、第3の駆動軸13によって駆動されて伸縮する右下側搬送機構2Rとを備える。左下側搬送機構2Lと、右下側搬送機構2Rとが、第1〜第3の駆動軸11〜13を挟んで基板搬送方向Pの両側に配置されている。
(もっと読む)
加工装置
【課題】密閉式の蓋付きカセットを用いる形態の加工装置において、カセット蓋が取り外された際に、カセット本体から半導体ウェーハが飛び出したことを検出可能とする加工装置を提供する。
【解決手段】一側面に搬出入開口部71aを有するカセット本体71と搬出入開口部71aを開閉するカセット蓋72とからなり、カセット本体71中に半導体ウェーハWを収容したカセット7を載置するカセットテーブル81を備えたカセット載置機構8と、カセットテーブル81に載置されたカセット7から搬出された半導体ウェーハWを保持するチャックテーブル19と、チャックテーブル19に保持された半導体ウェーハWを加工する加工手段としての切削ユニット24と、を具備する加工装置とする。
(もっと読む)
駆動装置及び基板処理システム
【課題】空間を分離する際のシール性及びメンテナンス性に優れた駆動装置を提供する。
【解決手段】同軸上に2つの回転軸(外側出力軸150及び内側出力軸250)を有する駆動装置80において、本体ケース300と外側出力軸150との間に真空シール170を配置し、更に、外側出力軸150と内側出力軸250との間に真空シール270を配置することで、駆動装置80の本体ケース300内の空間と、本体ケース300外の空間とを分離する。これにより、駆動装置80を減圧環境下で用いる場合であっても、駆動装置80の本体ケース300内の空間(大気圧環境側)と減圧環境側の空間とを分離することができるので、駆動装置80の減圧環境下での使用が可能となる。
(もっと読む)
基板搬送装置
【課題】内部気圧の変動によるチャンバの変形によってもロボットハンドの位置変動がなく、かつ、比較的安価に実現可能な構造の基板搬送装置を提供する。
【解決手段】真空チャンバと、前記真空チャンバ内に設けられ、搬入された基板を保持して所望の位置に搬送するための搬送ロボットを備えた基板搬送装置であって、前記搬送ロボットは、当該基板搬送装置を設置する床面に固定されると共に、その一部を、Oリングを介して、前記真空チャンバを構成する壁の一部に、当該真空チャンバ内を気密に保持可能で、かつ、相互に移動可能して、取り付けられている。
(もっと読む)
搬送装置
【課題】真空容器内を移動する移動容器内部の放熱を、移動容器の移動を妨げることなく実現する。
【解決手段】真空排気可能な第2搬送室14内で被搬送物を搬送する搬送装置1であって、第2搬送室14内を移動可能に構成された移動容器20と、第2搬送室14内に固定配置され気体を供給する供給ノズル42と、を備え、移動容器20は、容器内の雰囲気と遮断された空間部20bと、空間部20bに連通する給気口が設けられ、移動容器20が所定位置へ移動した際に供給ノズル42から給気口に供給される気体の圧力に応じて、給気口から空間部20bへ気体を導入する給気ユニット22と、空間部20bに連通する排気口が設けられ、空間部20bの気圧に応じて空間部20bの気体を排気口から排出する排気ユニット23と、を有する。
(もっと読む)
位置決め装置
【課題】回動駆動機構を設けることなく水平方向に対する移動体の移動量差に応じた回転角度で回転させて位置決めすることができ、装置自体を小型化及び軽量化する。
【解決手段】各電動モータを同期駆動してそれぞれの送りねじ9、11を所要の方向へ回転することにより各水平可動体17、19を一致する送り量で水平方向へ移動させ、水平方向に対する各水平可動体17,19の移動量の差に応じて一対のアーム37,41を平行揺動して取り付け部材35を回転して被位置決め手段を位置決めする。
(もっと読む)
板状物搬送装置
【課題】 保持テーブルと吸着パッドの平行度の自動調整を実現可能な板状物の搬送装置を提供することである。
【解決手段】 テーブル表面の傾きが異なる複数の保持テーブル間で板状物を搬送する板状物搬送装置であって、少なくとも垂直移動可能に支持されたアームと、該アームの先端部に固定され、上端部が逆円錐台形状の支持穴を有する支持ベースと、逆円錐台形状の頭部を有し、該頭部が該支持穴の逆円錐台形状部分に係合することにより該支持穴中に挿入支持された管状部材と、該管状部材の下端に連結された板状物を吸引保持する吸着パッドと、一端部が該管状部材の上端部に接続され他端が吸引源に接続された配管と、該管状部材に外嵌され、該支持ベースの肩部と該吸着パッドとの間に介装されたコイルばねと、を具備したことを特徴とする。
(もっと読む)
被吸着部材の供給方法及び装置
【課題】非磁性金属板等の被吸着部材をコンベアに正確に供給する。
【解決手段】被吸着部材(a)を吸着してコンベア(2)に垂直状態で受け渡し、被吸着部材(a)をコンベア(2)の把持部(6)に把持させる被吸着部材の供給方法において、被吸着部材(a)の吸着に静電チャック部材(9)を用い、この静電チャック部材(9)に電圧を印加することより静電チャック部材(9)で被吸着部材(a)を吸着して上記コンベア(2)の把持部へと送り、被吸着部材(a)が上記コンベア(2)の把持部で把持された直後に電圧の印加を解除して被吸着部材(a)を解放させるようにした。
(もっと読む)
1 - 20 / 1,258
[ Back to top ]