
Fターム[5F031JA32]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 検出する情報 (3,081) | 寸法の情報(距離、厚さ、角度等) (564)
Fターム[5F031JA32]に分類される特許
1 - 20 / 564
剥離装置、剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
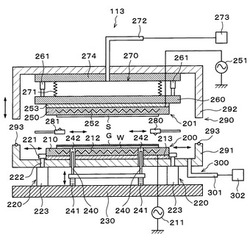
接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体
【課題】被処理基板と支持基板を適切に接合する。
【解決手段】接合装置の接合部113は、被処理ウェハWを保持する第1の保持部200と、第1の保持部200に対向配置され、支持ウェハSを保持する第2の保持部201と、第2の保持部201に保持された支持ウェハSを覆うように設けられた鉛直方向に伸縮自在の圧力容器271を備え、当該圧力容器271内に気体を流入出させることで第2の保持部201を第1の保持部200側に押圧する加圧機構270と、第1の保持部200、第2の保持部201及び圧力容器271を内部に収容し、内部を密閉可能な処理容器290と、処理容器290内の雰囲気を減圧する減圧機構300と、を有している。
(もっと読む)
ステージ装置、露光装置及びデバイス製造方法

【課題】 基板保持部の高さ調整に伴う残留応力の低減に有利なステージ装置を提供する。
【解決手段】 ステージ装置は、基盤と、基板を保持する基板保持部と、前記基盤上に設置され前記基板保持部の位置を変更可能に前記基板保持部を支持する少なくとも1つの支持部とを備える。前記少なくとも1つの支持部のそれぞれは、1つの第1調整部と複数の第2調整部と制御部とを含む。第1調整部は、前記基盤上に固定された一端部と前記基板保持部に固定された他端部とを有し、該他端部の位置を調整可能である。第2調整部と、前記基盤上に固定された一端部と、前記基板保持部と結合している第1状態と前記基板保持部と結合していない第2状態とに切り替え可能な他端部とを有し、該他端部の位置を個別に調整可能である。制御部は、前記複数の第2調整部及び前記第1調整部の少なくとも1つの他端部の位置を調整する間、前記複数の第2調整部の他端部のすべての結合状態が前記第2状態となるように制御する。
(もっと読む)
移動体装置及び露光装置、並びにデバイス製造方法
【課題】ウエハステージを精密駆動する。
【解決手段】 ウエハステージWSTは、粗動ステージ82と、微動ステージ83と、微動ステージ83のX軸方向の一側と他側のそれぞれに設けられた一対のボイスコイルモータMbと、微動ステージ83のX軸及びY軸のそれぞれに交差する軸Lc1,Lc2にそれぞれ平行な方向の一側と他側に設けられた二対のEIコアMc1、Mc2、Mc3、Mc4とを備えている。これにより、ウエハWを保持するウエハテーブルWTBを精密に駆動することが可能となるとともに、ボイスコイルモータ及びEIコアを粗動ステージ82内にコンパクトに配置することが可能になる。
(もっと読む)
チャック装置
【課題】ワークの板厚が薄く形成されたとしても、簡易な構成で、ワークの利用部位を非接触状態に維持したまま安定してチャックできる。
【解決手段】チャック装置1は、ワークWと対向する本体2と、本体に配され、ワークと接触する突出部3と、本体と突出部とワークとで囲繞される囲繞空間Nから気体を吸引する吸引手段5と、ワークまでの相対距離dを測定する測定センサ6と、相対距離に基づいて、相対距離が所定の目標値で安定化するように吸引手段の吸引力を制御する吸引制御部7と、を備える。
(もっと読む)
ウエハ搬送装置、太陽電池製造装置、ウエハ搬送方法、制御プログラムおよび記録媒体
【課題】厚みに個体差のあるウエハを破損させることなく搬送できるウエハ搬送装置を提供する。
【解決手段】本発明に係るウエハ搬送装置1は、ウエハ2を保持する保持部4と、保持部4の移動を制御する移動制御部71と、保持部4によるウエハ2の保持を制御する保持制御部72と、ウエハ2の下端のトレー3の上面に対する鉛直方向の距離が第1の距離であるか否かを判定する判定部73とを備える。
(もっと読む)
基板処理装置
【課題】複数の大きさの基板を処理可能な基板処理装置を提供すること。
【解決手段】基板処理装置は、任意の大きさの基板Wを水平に支持するセンターチャック13と、上向きの環状面57をそれぞれ有する複数のリング5とを含む。複数のリング5は、環状面57の内周縁の長さがそれぞれ異なる複数のサイズ調整リングを含み、内周縁がセンターチャック13に支持されている基板Wの周縁部に近接した状態で、環状面57が基板Wを水平に取り囲むように、複数のリング5のいずれか一つが、センターチャック13に支持されている基板Wの周囲に配置される。
(もっと読む)
薬液塗布装置
【課題】EUV露光装置内でのウェハー割れを防ぐ薬液塗布装置を提供すること。
【解決手段】実施形態の薬液塗布装置101は、基板の主表面上に薬液を塗布する薬液塗布ユニット102と、前記基板の裏面全体への異物の付着状態を検査する検査ユニット104と、前記検査ユニット104による検査結果に基づいて前記基板を良品として外部に搬出するか否かを判定する制御ユニット114と、を備える。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】安価な構成で、チャックのθ方向の傾きを精度良く検出して、基板のθ方向の位置決めを精度良く行う。
【解決手段】第1のステージに搭載されY方向(又はX方向)へ移動する第2のステージに第2の反射手段(35)を取り付け、第2の反射手段(35)のθ方向の位置ずれを検出する。チャック(10a,10b)に複数の光学式変位計(41)を設け、複数の光学式変位計(41)により、第2のステージに取り付けた第2の反射手段(35)までの距離を複数箇所で測定する。第2の反射手段のθ方向の位置ずれの検出結果に基づき、複数の光学式変位計(41)の測定結果から、チャック(10a,10b)のθ方向の傾きを検出し、検出結果に基づき、第3のステージによりチャック(10a,10b)をθ方向へ回転して、基板(1)のθ方向の位置決めを行う。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】経年変化に伴ってレーザー測長系のレーザー光源の出力特性が変化しても、移動ステージの位置を精度良く検出して、基板の位置決めを精度良く行う。
【解決手段】移動ステージに複数の反射手段34a,34b,35を取り付け、複数のレーザー干渉計32a,32b,33により、レーザー光源31a,31bからのレーザー光と各反射手段34a,34b,35により反射されたレーザー光との干渉を複数箇所で測定する。各レーザー干渉計32a,32b,33の測定結果から、移動ステージの位置を検出し、検出結果に基づき、移動ステージによりチャック10a,10bを移動して、基板1の位置決めを行う。各レーザー干渉計32a,32b,33が受光したレーザー光の強度の変化を検出し、検出したレーザー光の強度の変化を補う様に、レーザー光源31a,31bへ供給する駆動電流を制御する。
(もっと読む)
位置合わせ方法、露光方法、デバイス製造方法、及びフラットパネルディスプレイの製造方法
【課題】基板を露光する途中での、基板の取り外しを前提とする基板保持部材の採用を可能にする位置合わせ方法を提供する。
【解決手段】 基板P上に複数の区画領域(SA1、SA2等)を形成するに当たり、基板P上に区画領域を形成する度毎に、基板Pを該基板Pの面に平行な面内でステップ移動し、該ステップ移動の前後で、基板Pの同一の検出対象部(例えばエッジ)の位置情報を例えば複数のセンサ122X1、122X2、122Y1を用いて検出し、その検出結果に基づいて、区画領域の形成の際に、基板Pを露光領域IAに対して位置合わせする。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】光学系の高さを低くするとともに、回折格子からの0次光の影響を低減して計測精度を向上する。
【解決手段】X軸のエンコーダ10Xは、第1部材6に設けられ、X方向を周期方向とする回折格子12Xと、可干渉性のある計測光MX1及び参照光RX1を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1を回折格子12Xに向けてリトロー角から所定角度ずれた角度で反射する傾斜ミラー32XAと、回折格子12Xからの回折光と参照光RX1との干渉光を検出する光電センサ40XAと、光電センサ40XAの検出信号を用いて第1部材6に対する第2部材7のX方向の相対移動量を求める計測演算部42Xと、を備える。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】回折格子を用いて計測する際に、干渉用の光学系をコンパクトに配置可能として、かつ格子パターン面の高さ変化に対する干渉光強度の低下を抑制する。
【解決手段】エンコーダ10Xは、第1部材6に設けられたX軸の回折格子12Xと、計測光MX1,MX2を回折格子12Xの格子パターン面12Xbにほぼ垂直に入射させるレーザ光源16と、第2部材7に設けられて、回折格子12Xから計測光MX1によって発生する回折光DX1を回折格子12Xに再度入射させる直角プリズム26Aと、回折光DX1によって発生する回折光DX2と他の回折光EX2との干渉光を検出する光電センサ40Xと、を備える。
(もっと読む)
ステージ装置及びプロセス装置
【課題】機能材料層の厚さ分布を高精度かつ短時間で制御可能な技術を提案する。
【解決手段】実施形態に係わるステージ装置は、被処理基板13の下面側に配置され、上下方向に駆動される複数の高さ制御素子を備える高さ制御ユニット12と、高さ制御ユニット12を制御する制御ユニット15とを備える。制御ユニット15は、被処理基板13の上面を複数のエリアに区分し、かつ、複数の高さ制御素子の各々の高さをデータ値に基づいて制御することにより各エリアの高さを独立に設定する。
(もっと読む)
位置合わせ装置、位置合わせ方法、および、描画装置
【課題】高精度かつ迅速に、基板を適正な回転位置に位置合わせできる技術を提供する。
【解決手段】位置合わせ装置100は、ステージ11を回転させる回転機構121と、ステージ11外からステージ11の位置を測長して、当該測長値に基づいてステージ11の回転角度θを特定する測長部13と、ステージ11に載置された基板Wを適正な回転位置におくために必要なステージの回転角度(目標回転角度θo)を特定する目標回転角度特定部201と、測長部13で計測されたステージ11の回転角度θを目標回転角度θoに近づけることができるような回転機構121の制御パラメータNを出力し、当該制御パラメータNで回転機構121を駆動制御する回転制御部202と、を備える。
(もっと読む)
基板搬送ロボット
【課題】駆動アーム部材に関節部を介して従動アーム部材321,322を連結して成る屈伸自在な一対のアームと、基板を支持するハンド4とを備え、両アームの従動アーム部材の先端に夫々ギヤ51,52が固定され、両ギヤを互いに噛合させた状態でハンドに軸支した基板搬送ロボットにおいて、ギヤの摩耗を生じてもバックラッシュを適正範囲に簡単に調整できるようにする。
【解決手段】各ギヤ51,52をハンド4に軸支する各支軸61,62を、該各支軸61,62に対し偏心した偏心部6aを介してハンド4に回動調整自在に連結する。また、偏心部6aの外端面に、偏心部6aの回動角を視認するためのマーク6bを付す。
(もっと読む)
4軸アライメントステージの原点位置設定方法
【課題】 4軸制御の原点復帰動作を駆動軸同士の機械的な姿勢の相互干渉を抑えた状態で可能にする。
【解決手段】 XYθガイドとボールねじ直動機構からなる駆動ユニットを4台備えた4軸アライメントステージにて、各駆動ユニットに仮の原点位置を設定して(S1)、それを基準に4軸制御による原点復帰動作を行う(S3)。次いで、全軸同時サーボオフを行い(S4)、その直後に生じる各駆動ユニットのガイドブロックの移動量を計測し(S5)記憶させる(S6)。その後、移動量の計測値を補正量として各駆動ユニットの仮の原点位置を補正し(S7)、補正後の仮の原点位置を基準とする原点復帰動作と、全軸同時サーボオフ直後の移動量の計測及び記憶と、移動量の計測値を補正量とする仮の原点位置の補正を繰り返し、全軸同時サーボオフ直後の移動量が収束したときの仮の原点位置を、4軸制御による実際の原点復帰動作用の原点位置に設定する。
(もっと読む)
基板搬送装置、これを備える塗布現像装置、及び基板搬送方法
【課題】基板を保持して搬送する基板保持部の位置を検出することにより、基板の搬送を監視することができる基板搬送装置を提供する。
【解決手段】基板を支持する支持部を含む搬送機構と、ラインセンサ、及び該ラインセンサに光を照射する光源を含み、前記搬送機構が動作して前記支持部が移動したときに前記光が前記支持部により遮られ得るように配置される位置検出部と、前記ラインセンサからの信号に基づいて、前記搬送部の位置を検出する制御部とを備える基板搬送装置が提供される。
(もっと読む)
測定装置、露光装置及びデバイスの製造方法
【課題】物体の位置の測定に有利な技術を提供する。
【解決手段】第1ヘッド112a、112c又は第2ヘッド113aで第1物体に対する第2物体の相対的な位置を測定する第1測定部110と、第1物体に対する第2物体の相対的な位置を求める処理を行う処理部と、を有し、処理部は、第1ヘッド112a、112c及び第2ヘッド113aのうち一方のヘッドで以前に検出された回折格子111a、111b上の位置を他方のヘッドの視野の中心に位置決めした状態で一方のヘッドで以前に検出された回折格子上の位置とは別の位置を一方のヘッドで検出する処理を、一方のヘッドが回折格子の全面を検出するまで繰り返して回折格子の変形量を求める第1処理と、回折格子の変形量に基づいて、第1ヘッド112a、112c又は第2ヘッド113aで測定された第1物体に対する第2物体の相対的な位置を補正する第2処理と、を行う。
(もっと読む)
搬送装置及び印刷装置
【課題】多種多様の搬送に対応可能で装置の小型化及び低価格化に寄与できる搬送装置を提供する。
【解決手段】第1方向xに延びる第1把持領域13dで基材を把持する第1把持部H1と、第1の把持領域の一端側に配置され、第1方向と交差する第2方向yに延びる第2把持領域13eで基材を把持する第2把持部H2と、を備える。
(もっと読む)
1 - 20 / 564
[ Back to top ]